Journal of Jilin University(Engineering and Technology Edition) ›› 2025, Vol. 55 ›› Issue (10): 3108-3118.doi: 10.13229/j.cnki.jdxbgxb.20240020
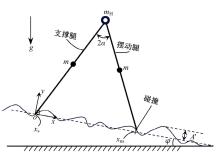
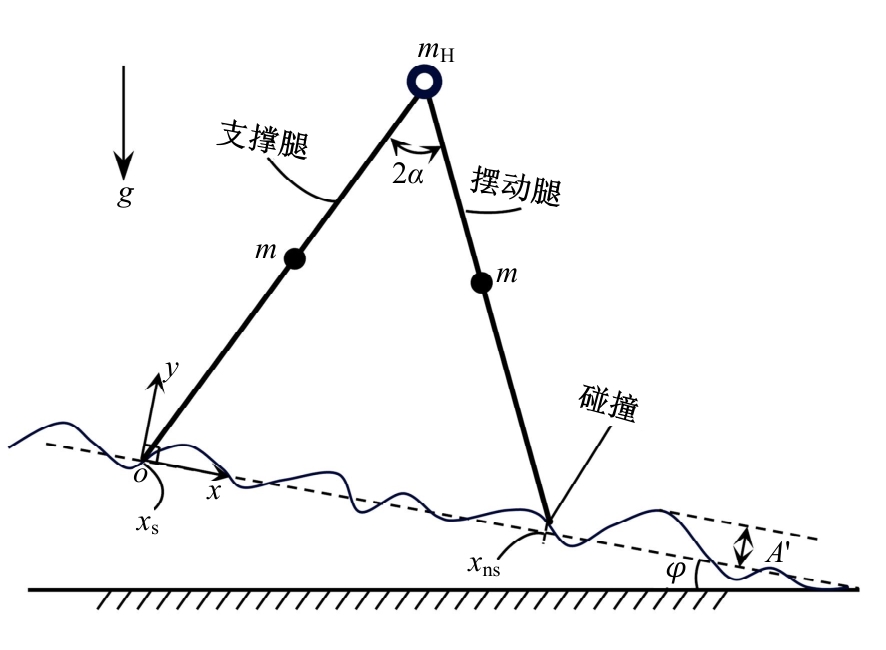
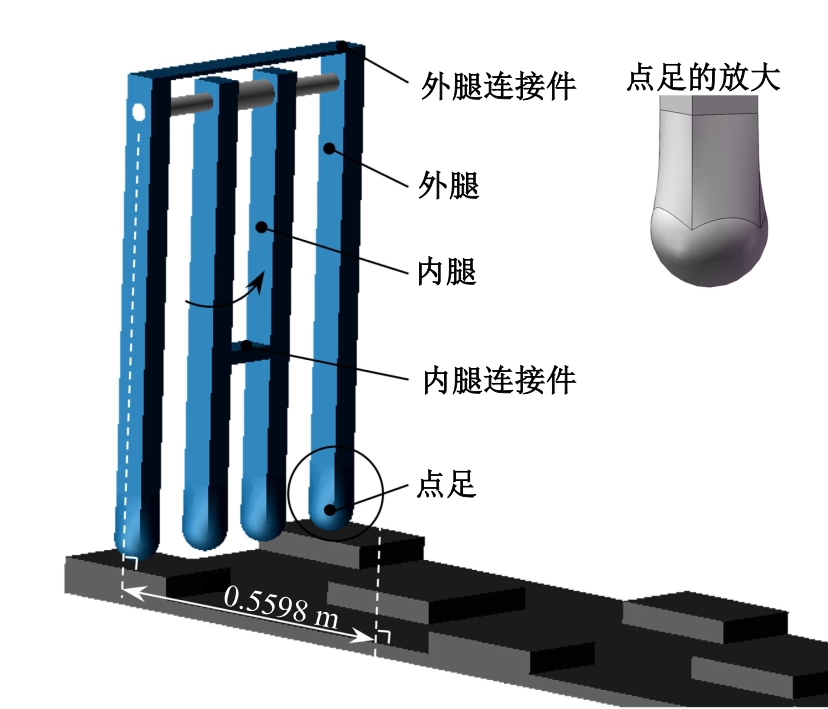
Evolution of gait dynamics of passive walking robot on rough terrain
Jian-she GAO( ),Yu-meng BAO,Tian ZHAO,Shun-liang DING,Xiao-bo RAO()
),Yu-meng BAO,Tian ZHAO,Shun-liang DING,Xiao-bo RAO()
- School of Mechanical and Power Engineering,Zhengzhou University,Zhengzhou 450001,China
CLC Number:
- TP242





| [1] | Moon J S, Lee M, Bae J, et al. Analysis of period-1 passive limit cycles for flexible walking of a biped with knees and point feet[J]. Robotica, 2016, 34(11): 2486-2498. |
| [2] | Znegui W, Gritli H, Belghith S. A new Poincaré map for investigating the complex walking behavior of the compass-gait biped robot[J]. Applied Mathematical Modelling, 2021, 94: 534-557. |
| [3] | Wu Y, Qiao S, Yao D. A hybrid chaotic controller integrating hip stiffness modulation and reinforcement learning-based torque control to stabilize passive dynamic walking[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2023, 237(3): 673-691. |
| [4] | Mcgeer T. Passive dynamic walking[J]. The International Journal of Robotics Research, 1990, 9(2): 62-82. |
| [5] | Iqbal S, Zang X, Zhu Y, et al. Bifurcations and chaos in passive dynamic walking: a review[J]. Robotics and Autonomous Systems, 2014, 62(6): 889-909. |
| [6] | 钱志辉, 周亮, 任雷, 等. 具有仿生距下关节和跖趾关节的完全被动步行机[J]. 吉林大学学报: 工学版, 2018, 48(1): 205-211. |
| Qian Zhi-hui, Zhou Liang, Ren Lei, et al. Completely passive walking machine with bionic subtalar jointand matatarsal phalangeal joint[J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(1): 205-211. | |
| [7] | 高家昌, 高建设, 陶征. 被动步行平足机器人动力学参数研究[J]. 机械传动, 2023, 46(12): 22-30. |
| Gao Jia-chang, Gao Jian-she, Tao Zheng. Research on dynamic parameters of a passive walking robot with flat feet[J]. Journal of Mechanical Transmission, 2023, 46(12): 22-30. | |
| [8] | Goswami A, Thuilot B, Espiau B. A study of the passive gait of a compass-like biped robot: symmetry and chaos[J]. International Journal of Robotics Research, 1998, 17(12): 1282-1301. |
| [9] | Garcia M, Chatterjee A, Ruina A, et al. The simplest walking model: stability, complexity, and scaling[J]. Journal of Biomechanical Engineering, 1998, 120(2): 281-288. |
| [10] | Wisse M, Schwab A L, van der Helm F C T. Passive dynamic walking model with upper body[J]. Robotica, 2004, 22(6): 681-688. |
| [11] | Narukawa T, Takahashi M, Yoshida K. Level-ground walk based on passive dynamic walking for a biped robot with torso[C]∥Proceedings 2007 IEEE International Conference on Robotics and Automation, Rome, Italy, 2007: 3224-3229. |
| [12] | 柳宁. 双足被动行走器动力学仿真与实验研究[D]. 北京:清华大学航天航空学院, 2009. |
| Liu Ning. Simulation and experimental study on the dynamics of passive bipedal walker[D]. Beijing: School of Aerospace Engineering, Tsinghua University, 2009. | |
| [13] | Kim J, Choi C H, Spong M W. Passive dynamic walking with symmetric fixed flat feet[C]∥2007 IEEE International Conference on Control and Automation, Guangzhou, China, 2007: 24-30. |
| [14] | Wu B, Zhao M. Bifurcation and chaos of a biped robot driven by coupled elastic actuation[C]∥Proceeding of the 11th World Congress on Intelligent Control and Automation, Shenyang, China, 2014: 1905-1910. |
| [15] | Safartoobi M, Dardel M, Daniali H M. Gait cycles of passive walking biped robot model with flexible legs[J]. Mechanism and Machine Theory, 2021, 159: No.104292. |
| [16] | Iida F, Tedrake R. Minimalistic control of biped walking in rough terrain[J]. Autonomous Robots, 2010, 28: 355-368. |
| [17] | Afshar P N, Ren L. Dynamic stability of passive bipedal walking on rough terrain: a preliminary simulation study[J]. Journal of Bionic Engineering, 2012, 9(4): 423-433. |
| [18] | Su J L S, Dingwell J B. Dynamic stability of passive dynamic walking on an irregular surface[J]. Journal of Biomechanical Engineering, 2007, 129(6): 802-810. |
| [19] | Bogsjö K, Podgórski K, Rychlik I. Models for road surface roughness[J]. Vehicle System Dynamics, 2012, 50(5): 725-747. |
| [20] | Rao X B, Gao J S, Ding S L, et al. Multistability of gaits, the basin of attraction and its external topology in the simplest passive walking model on stairs[J]. Chaos, Solitons & Fractals, 2023, 172:No. 113592. |
| [21] | Balcerzak M, Dąbrowski A, Stefański A, et al. Spectrum of Lyapunov exponents in non-smooth systems evaluated using orthogonal perturbation vectors[C]∥MATEC Web of Conferences, Lodz, Poland, 2018, 148: No.10003. |
| [22] | 丁旺才. 多自由度碰撞振动系统的环面分岔与混沌研究[D]. 成都: 西南交通大学力学与工程学院, 2004. |
| Ding Wang-cai. Research on torus bifurcations and chaos of multi-degree-of-freedom vibro-impact systems[D]. Chengdu: School of Mechanics and Engineering, Southwest Jiaotong University, 2004. | |
| [23] | Singh J P, Roy B K. Crisis and inverse crisis route to chaos in a new 3-D chaotic system with saddle, saddle foci and stable node foci nature of equilibria [J]. Optik, 2016, 127(24): 11982-12002. |
| [24] | Gritli H, Belghith S, Khraief N. Cyclic-fold bifurcation and boundary crisis in dynamic walking of biped robots[J]. International Journal of Bifurcation and Chaos, 2012, 22(10): No.1250257. |
| [25] | Zhang Y, Luo G. Detecting unstable periodic orbits and unstable quasiperiodic orbits in vibro-impact systems[J]. International Journal of Non-Linear Mechanics, 2017, 96: 12-21. |
| [1] | Shu-qin SUN,Xin QI,Zheng-hai YUAN,Zai-hua LI,Xiao-jun TANG. Detection method of weak harmonics of power system based on coupled chaotic system array [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(3): 1082-1092. |
| [2] | Shi-jun WANG,Guan-wei LUO. Periodic motion transition characteristics of a vibro-impact system with multiple impact constraints [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(4): 902-916. |
| [3] | Yan YANG,Yu-qing SHI,Xiao-rong ZHANG,Guan-wei LUO. Dynamic stability analysis of a amplitude⁃limited vibration system with multiple rigid constraints [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(2): 364-375. |
| [4] | Lun-hua BAI,Rui-li SHEN,Xing-biao ZHANG,Lu WANG. In-plane stability of self-anchored suspension bridge [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(5): 1500-1508. |
| [5] | CHEN Fu,ZANG Xi-zhe,YAN Ji-hong,ZHAO Jie. Development of navigable hexapod biomimetic robot Spider [J]. 吉林大学学报(工学版), 2011, 41(03): 765-770. |
| [6] | YANG Mao, LI Cheng-Feng, TIAN Yan-Tao. Decentralized flocking control for swarm robotics in dynamic environment [J]. 吉林大学学报(工学版), 2011, 41(02): 497-0502. |
| [7] | TIAN Wei-Jun, JIN Jing-Fu, CONG Qian. Application of nonlinear time series analysis on dynamic stability [J]. 吉林大学学报(工学版), 2010, 40(增刊): 282-0286. |
| [8] | YANG Zhi-yong, GUI Li-hua, YANG Xiu-xia, GU Wen-jin . Exoskeleton suit neural network sensitivity amplification control technique [J]. 吉林大学学报(工学版), 2009, 39(03): 824-0829. |
|
||