



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
汽车制动防抱死系统分离路面的控制策略
引用本文
初亮, 蔡健伟, 王彦波, 富子丞, 姚亮, 张永生. 汽车制动防抱死系统分离路面的控制策略. 2014, 44(2): 287-291[CHU Liang, CAI Jian-wei, WANG Yan-bo, FU Zi-cheng, YAO Liang, ZHANG Yong-sheng. Antilock braking control algorithm on split-mu road. 吉林大学学报(工学版), 2014, 44(2): 287-291] 
Permissions
Copyright©2014, 吉林大学学报编辑部
版权所有.吉林大学学报编辑部
汽车制动防抱死系统分离路面的控制策略
初亮(1967),男,教授,博士生导师.研究方向:节能与新能源汽车关键技术.E-mail:chuliang@jlu.edu.cn
摘要
分析了汽车制动防抱死系统(ABS)在分离路面制动过程中的制动特点。提出分离路面的识别和汽车控制算法,并以此控制车辆横摆角速度和侧偏角的变化,以保证车辆的横向稳定性和制动距离。并据此进行了实车试验,试验结果表明,所提出的路面识别方法和控制策略能改善汽车在分离路面制动的横向稳定性并且能保证制动距离。
关键词:
车辆工程; 制动防抱死系统; 分离路面; 侧向稳定; 实车试验
中图分类号:U463.52
文献标志码:A
文章编号:1671-5497(2014)2-287-5
Antilock braking control algorithm on split-mu road
Abstract
The features of the Antilock-Braking System (ABS for short) while braking on split-mu road are analyzed in this paper. To guarantee the yaw stability and the braking distance, an identification method of split-mu road and the control algorithm are presented to control the changes of the yaw velocity and the sideslip angle. The simulation and test results show that the identification method of split-mu road and the control strategy can not only improve the yaw stability but also guarantee the braking distance. The proposed method and control strategy play an important role in improving the safety while braking on split-mu road.
Keyword:
vehicle engineering; anti-lock braking system; plit-mu road; lateral stability; vehicle field test
0 引 言
ABS系统是改善汽车主动安全的重要装置,随着人们对于行驶安全的重视,它的应用日益广泛[ 1]。汽车在分离路面(一边车轮处于高附着系数路面如沥青路面,另一边车轮处于低附着系数路面如冰路面)上紧急制动时容易出现跑偏或者甩尾等危险工况,甚至偏离原行驶车道而驶入对方车道,具有很大的危险性[ 2, 3]。对于未加装动力学控制装置的车辆更容易发生事故。ABS系统能够提高分离路面上汽车紧急制动时的侧向稳定性,并缩短制动距离[ 4, 5]。文献[6]提出利用前轮主动转向来减小车辆的横摆运动,并且利用滑模控制的方法实现。文献[3]提出利用横摆角速度和侧向位移为控制变量,采用模糊PID控制横摆力矩的方法,实现对汽车在分离路面的稳定性控制。文献[4]提出在四通道ABS基础上采用主动前轮转向的方法提高侧向稳定性,并且若主动前轮转向无法将偏航纠正时,则四通道ABS切换到三通道模式,以保证车辆的稳定性。文献[7]提出了利用滑移率控制实现弯道分离路面的ABS控制。文献[8]则采用滑移率和加速度作为路面识别参数,但对于分离路面的识别涉及较少,控制方法主要集中在通过前轮主动转向和复合横摆力矩控制。
目前,四传感器四通道ABS系统较为常用,可以实现四轮独立控制。在分离路面上制动时,ABS作用下,4个车轮均能各自达到相应于路面条件的最佳滑移率,4个车轮的地面制动力均达到相应路面的最大值,制动距离最短,由于两侧车轮制动力分配不平衡,将使横摆力矩增大,导致产生横摆角加速度,并使车辆的横摆角速度迅速增大,车辆将产生较大的制动跑偏,因此会使车辆处于不稳定状态。
本文采用前轮独立、后轮低选控制,该控制下ABS系统制动距离变长,但是由于横摆力矩较四轮独立控制变小,因此横向稳定性相对变好。另外,制动时载荷前移,后轴所需制动力较前轴小,所以后轮采用低选控制对于制动效能影响较小。
1 分离路面识别
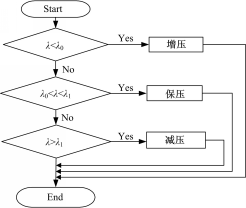
及时准确地识别分离路面能够提高系统的响应速度,有利于提高车辆的稳定性。由于车辆两侧附着系数相差较大,紧急制动时,两侧车轮压力和滑移率存在差值。本文以两侧车轮压力差和滑移率差为分离路面识别的输入量。识别算法流程见图1:
 | 图1 路面识别算法流程图Fig.1 Detection algorithm of split-mu road |
其中门限值需要经过试验标定得到最佳值。路面识别过程中所用参数如下:Δ PFA为前轴左右两侧车轮压力差;Δ λFA为前轴左右两侧车轮滑移率差; FP为初次修正后的压差; Psplit为最终修正后的压差; FΔP为压差因子; FΔ λ为滑移率差因子; F ax为车辆纵向加速度因子; F ay为车辆横向加速度因子;Pdiff为压差门限值; V0为车速门限值; a xsplit为分离路面纵向减速度; a xmax为分离路面纵向减速度最大值; a ysplit为分离路面横向减速度; a ymax为分离路面横向减速度最大值;Δ a x、Δ a y为斜率的倒数;Splitflag为分离路面标志位Split-mu road为分离路面。
算法步骤如下:
(1)计算前轴左、右两轮压差和滑移率差:

同理,可以得到横向加速度因子:

2 控制策略
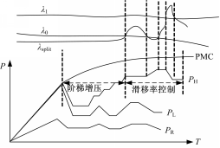
对于分离路面的汽车防抱死制动,本文分为两个阶段进行控制。第一阶段以阶梯增压为主[ 9],当前轴处于低附着路面的车轮有抱死倾向时,进入ABS控制,而同轴的高附着路面的车轮则进入保压、减压、阶梯增压或者减压、保压、阶梯增压的控制过程,前者适用于制动强度相对较小、后者适用于制动强度相对较大的情况。
如图2所示:
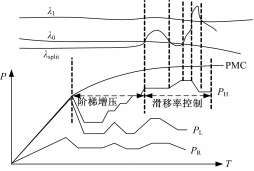 | 图2 分离路面控制示意图Fig.2 Control diagram of split-mu road |
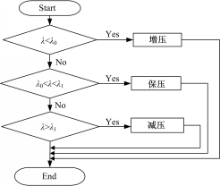
分离路面紧急制动后,低附着路面车轮首先进入ABS控制,与其同侧的车轮则保压、减压,进入阶梯增压控制阶段,然后进入以滑移率为门限的ABS控制。实时计算车轮滑移率,如果出现滑移率大于门限值 λ0,则保压,滑移率小于 λ0则增压,滑移率再次大于 λ0,车轮再次保压,随着车轮转速恢复,滑移率小于 λ1,则车轮进入减压状态。如此反复,调节车轮压力,使得车轮滑移率处于最佳值附近,充分利用路面附着系数。
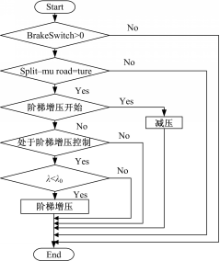
图3和图4分别为车轮在阶梯增压控制阶段和滑移率ABS控制阶段的控制流程图。图中PMC为主缸压力, PH、 PL分别为前轴高附着路面和低附着路面侧轮缸压力, PR为后轴轮缸压力,BrakeSwitch为制动开关信号。 图3所示:
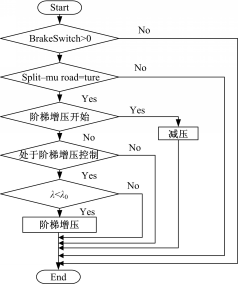 | 图3 阶梯增压控制流程图Fig.3 Control of stepped pressurized |
为进入和退出阶梯增压控制的判断流程图和控制流程图。当满足车速 
 | 图4 滑移率门限值控制流程图Fig.4 Control of slip rate threshold |
3 试验分析
实车试验中所用车型部分参数如下:整车质量为1290 kg,车轮半径为307 mm,质心至前轴距离为1053 mm,质心至后轴距离为1059 mm,前轮距为1505 mm,后轮距为1489 mm。
试验车辆分别装有4个轮缸压力传感器、VBOX测速仪和陀螺仪。分离路面条件如图5所示:
 | 图5 分离路面Fig.5 Split-mu road |
驾驶员一侧为高附着路面,另一侧为抛光冰路面。
利用dSPACE系统实现快速控制原型系统,通过RTI编译器生成目标代码,并下载至dSPACE-MicroAutoBox后完成实车道路试验,进行控制算法的调试和验证[ 10]。为了验证本文所提出的控制算法,同时考虑到车辆没有加装防护装置,首先在软件中取消阶梯增压控制,在30 km/h的速度下,进行ABS试验,结果如图6所示:
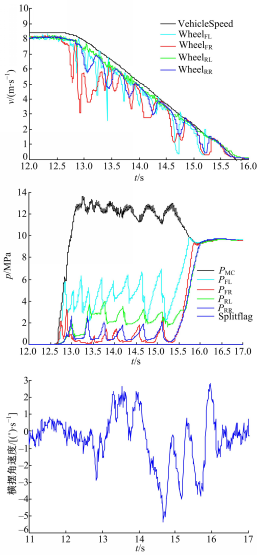 | 图6 30 km/h下的速度、压力和横摆角速度Fig.6 Speed、pressure and yaw rate under 30 km/h |
其中,Vehicle Speed为通过VBOX获取的车速,WheelFL、WheelFR、WheelRL和WheelRR分别为左前、右前、左后和右后车轮轮速; PMC、 PFL、 PFR、 PRL和 PRR分别为主缸、左前、右前、左后和右后车轮轮缸压力;YawRate为通过陀螺仪获取的车辆横摆角速度;Splitflag为分离路面标志位。为了更好地对比所提出的控制算法的有效性,可以通过VBOX测得制动距离,并在试验过程中记录数值。由于没有安装方向盘转角传感器,故不能对驾驶员输入的方向盘转角变化情况进行对比。 由图6可知,车辆进入ABS控制,每个车轮轮缸压力都充分发挥出其制动能力。但为了维持车辆稳定性,驾驶员需要及时施加很强的方向盘修正控制才能维持车辆稳定性。制动距离为8.96 m。
加入本文所提出的控制算法后,首先进行30 km/h的试验,测得制动距离为9.88 m。与没有分离路面控制时制动距离相比,制动距离增加了0.92 m,稍有变大,但是横摆角速度较小,保证车辆具有一定的操纵稳定性和侧向稳定性。
进行了80 km/h的试验,结果如图7所示:
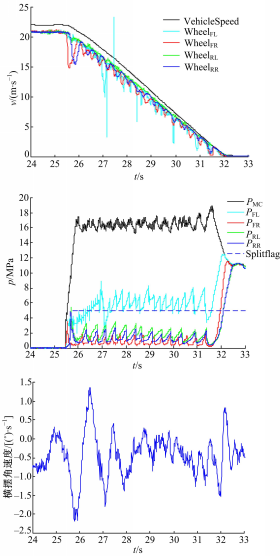 | 图7 80 km/h下的速度、压力和横摆角速度Fig.7 Speed、pressure and yaw rate under 80 km/h |
由图7可知,前轴较早识别出分离路面Splitflag=1,车辆进入分离路面控制。前轴高附着一侧的车轮的制动压力首先是阶梯增压,然后进入以滑移率为控制参数的车轮防抱死独立控制,后轴车轮轮缸压力保持在相同的压力水平,实现了低选控制,维持了车辆的稳定性。车辆横摆角速度维持在一个可控的范围内,并且,驾驶员有充分的时间做出反应来修正方向盘,维持车辆的行驶路径,使得车辆不发生跑偏。
4 结 论
(1)汽车在分离路面上紧急制动是比较常见的危险工况,本文提出了以修正后的压差和滑移率差作为识别参数,可以准确和迅速地识别分离路面。限制分离路面高附着一侧的前轮轮缸压力的增长速度,从而控制车辆横摆的增长速度,给驾驶员足够的反应时间。
(2)在分离路面制动时,装有ABS的车辆能充分利用路面附着系数,使两侧车轮制动力不平衡,影响车辆横向稳定性。本文所提出的分离路面控制算法,在制动距离和车辆稳定性中间取一个折中,既能保证制动距离不致过长又能保证车辆具有一定的操纵稳定性和侧向稳定性。对于提高汽车的安全行驶具有一定的意义。
(3)为进一步验证所提出的分离路面控制算法对于驾驶员的反应时间、驾驶员在制动时施加于方向盘上的力矩和方向盘转角的对比效果,在后期试验时安装方向盘转角和力矩传感器,重复文中所述试验。
The authors have declared that no competing interests exist.
参考文献
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|