
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于混合交通流的车辆换道行为
[魏丽英 , 吴荣华, 王志龙, 朱建辉]
, 吴荣华, 王志龙, 朱建辉]
, 吴荣华, 王志龙, 朱建辉]
|
|


作者简介:魏丽英(1974-),女,副教授,博士.研究方向:交通流理论及交通仿真建模.E-mail:lywei@bjtu.edu.cn
采用元胞自动机模型研究了城市交通中车辆的换道行为。在模拟非对称换道规则下混合交通流中的车辆换道行为中,通过增加公交车影响因子这一换道动机,分析了公交车对社会车辆换道行为的影响。分析结果表明:公交车的存在增加了车流中车辆的换道概率,且当道路处于中低密度状态时,社会车辆换道概率随公交车比例上升而增加,相应路段平均车速降低。在考虑了公交车影响因子后发现,公交车影响因子的存在会明显降低车辆换道概率。
This article studies the lane-changing behavior of vehicles in urban traffic using cellular automata model. In the simulation of lane-changing behavior in mixed traffic flow under asymmetric lane-changing rules, the impact of buses on the lane-changing behavior of social vehicles is analyzed by adding transit influencing factors as term of motivation. Results show that the presence of buses increases the lane-changing probability of social vehicles. Under the condition of low traffic density, the lane-changing probability of social vehicles with the bus ratio, and at the same time the average speed drops in corresponding road sections. In addition, when considering the bus influencing factors, the lane-changing probability obviously decreases.
为了满足日益增长的交通需求,缓解交通压力,公共交通已成为城市交通系统中不可或缺的一部分。由于受自身体积、车速及停靠接驳行为等诸多因素的影响,公交车的运行特点与其他社会车辆有着明显差异。这种差异将影响到城市交通流中其他车辆的运行行为及通行效率。学者们曾采用多种方法对公交车给城市交通流带来的影响进行过深入的研究。由于公交车运行速度通常比社会车辆低,有公交车的交通流常表现出不同的稳态与亚稳态特性[ 1]。因此,通过仿真建模的方式对城市公交车与社会车辆混行车流进行分析是了解混合交通流运行状态的一种有效手段[ 2]。当前,多数学者把关注点放在公交车停靠站对交通流的影响[ 3, 4, 5, 6]以及包含公交专用道的车流行为研究上[ 7, 8, 9],但对混合车流中公交车会如何影响车流中车辆换道行为的研究较少。
由于元胞自动机(Cellular automata,CA)模型具有高度的空间离散、时间离散、状态离散等特点,能通过制定演化规则来推演系统的运行规律,因此,被广泛应用于交通领域的模拟仿真中。Nagel和Schreckenberg于1992年提出的NaSch模型是最著名的交通流元胞自动机模型[ 10]。为描述更丰富的车辆运行行为,学者们在NaSch模型的基础上提出了大量改进模型[ 11, 12, 13]。但此类模型均未分析运行中的公交车对社会车辆换道行为产生的影响。本文建立了考虑公交车影响因子的多车道换道模型,标定了公交车影响因子的值,并在该模型的基础上模拟了多种状态下的交通流,分析了公交车对城市道路中车辆换道率、车流运行速度及换道行为的影响。
在城市道路中运行的车辆通常以小汽车和公交车为主,因此本研究在模型的构建中将车辆的类型简化成公交车和小汽车两种车型。通常情况下,公交车机动性较差,速度低于小汽车,而体积大于小汽车。通过对小汽车体积的统计发现,两厢车的平均车长在4.2 m左右,三厢车平均车长为4.5 m左右(少量豪车及加长车除外)。同时,通过对北京市公交车进行统计发现,在单车厢公交车中个别车长为6 m,绝大多数为9 m;而在双车厢公交车中,大部分为12 m,也有少量车为15 m。综合考虑公交车、小汽车的车长及车与车间的安全距离,确定元胞尺寸为5 m,小汽车占1个元胞,公交车占2个元胞。
由于城市交通中干扰因素过多(如小区进出口、信号灯及斑马线、限速、机非干扰等),为确保安全行驶,驾驶员在驾驶车辆时往往比较保守。因此,确定公交车的最大车速为2个元胞(36 km/h),小汽车最大车速为3个元胞(54 km/h),即当车型type=1时,
经典的NaSch模型确立了车辆更新的四条基本规则,然而,该规则模拟出的车辆跟驰行为与城市交通中的实际车辆跟驰行为有一定差距,主要表现在车速的确定和车辆慢启动行为上。VE模型在确定车辆速度时考虑了前车的速度,TT模型增加了慢启动规则,用以描述车辆在从零速度启动时的延误现象[ 14, 15, 16]。本文综合了VE模型和TT模型的特点,同时增加了公交车因素,制定了新的跟驰规则。
计算允许最大速度:
随机慢化:以随机慢化概率
规则中,
当驾驶员在确定下一时刻的速度时,不仅需要判断与前车的间距,同时还会判断前车的运行状态,这符合在高密度、低流速的城市交通流中驾驶员的心理。
驾驶员的换道行为受换道条件和换道动机控制。换道条件为实际道路交通状况的反应,无法改变;换道动机受驾驶员自身特性的影响,包括年龄、性别、性格、情绪、驾龄、身体状况、目的地等。换道规则分为对称换道规则和非对称换道规则。由于我国规定超车道在左侧,因此采用左侧缺省的非对称换道规则。通过对174份SP调查问卷的统计发现,当有超车条件时,40.8%的驾驶员会选择从左侧超车,26.5%的驾驶员选择右侧超车,32.7%的驾驶员选择不超车。调查中还显示,当驾驶员准备超车时,如果发现目标车道后方有公交车,且本车道通畅,会有77.8%的驾驶员选择让行公交车;如果此时本车道拥挤,则有54.3%的驾驶员选择给公交车让行;如果此时本车道堵塞,则仅有37.0%的驾驶员选择让行公交车。
当路段上只有两条车道时,换道规则较为简单,即左侧车道车辆向右换道或右侧车道车辆向左换道。当车道数在3条以上时,中间车道的换道规则相对复杂,需判断左右两条车道的换道条件及换道动机。据此,本文研究制定了新的换道规则。
(1)左侧车道换道规则
左侧车道的换道规则下包含规则1和规则2。其中,规则1是满足换道条件和换道动机条件下的速度和位置更新规则;规则2是不满足换道条件或换道动机条件下的速度和位置更新规则。
当
当不满足换道条件或换道动机时,车辆在当前车道向前行驶,采用规则2进行速度和位置更新:
(2)右侧车道换道规则
右侧车道换道规则与左侧车道换道规则原理类似。当换道条件满足时,即
当不满足换道条件或换道动机时,车辆向前行驶,采用规则2进行速度和位置更新:
(3)中间车道换道规则
与左侧车道换道规则和右侧车道换道规则相比,中间车道换道规则相对较为复杂。在判断换道条件和换道动机时,中间车道需将左、直、右三个方向的元素综合判断。
中间车道车辆向其右侧换道的条件为
中间车道车辆向其左侧换道的条为
当不满足向左、右两侧换道中任何一组条件时,车辆在原车道内向前行驶。速度和位置更新使用规则3:
以上三条规则中参数都是对第
该模型中考虑了换道动机中的换道意愿和公交车影响因子,能够较好地反映出受公交车影响下的车辆换道行为。
在模拟过程中,设仿真时长为1000 s,仿真间隔时间为1 s,车道长度为 L=1000个元胞,车道数为3。车型分为小汽车和公交车,其中小汽车尺寸采用1个元胞,公交车采用2个元胞。小汽车的最大车速
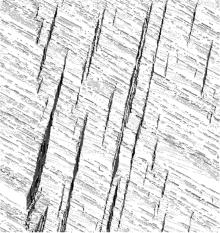
首先采用开放边界条件,在输入流量为800 veh/h的条件下分别模拟了单车道和三车道两种情况,得到模拟结果如图1及图2所示。图中黑色表示公交车,灰色表示小汽车。图1为单车道情况下(即不能换道)的时空图,流量为800 veh/h。图2(a)(b)(c)为三车道情况下的时空图,流量为800 veh/h,图1与图2(a)(b)(c)的其他参数完全相同。对比这4张图可以发现图1中有多处出现了停车排队,而图2(a)(b)(c)中尽管有车辆中途停下,但车辆排队现象不明显。这表明多车道的道路比单车道的道路稳定。因为在单车道条件下,道路中一旦出现停车,后车则必须停下等待,在慢启动的作用下,出现排队现象;而在多车道道路上,由于允许车辆换道,因此当前导车停下时,车辆可以选择换道绕行,从而使车流运行相对通畅。图2(d)(e)(f)为输入流量1000 veh/h条件下的时空图,其他参数与图2(a)(b)(c)相同。由于输入端流量上升,超出了道路的承载能力,使得部分路段出现亚稳态,而通过对时空图的分析发现,当出现排队时,各个车道均会受到影响。图2(d)(e)(f)中方框和圆圈内部分有明显相似性。这是由于当某个车道出现排队时,后边车辆会选择去相邻车道,干扰了相邻车道的车辆,当相邻车道也近似于饱和状态时,换道车辆会严重影响其正常运行。
 | 图1 单车道的时空图Fig.1 Spatio-temporal of single lane |
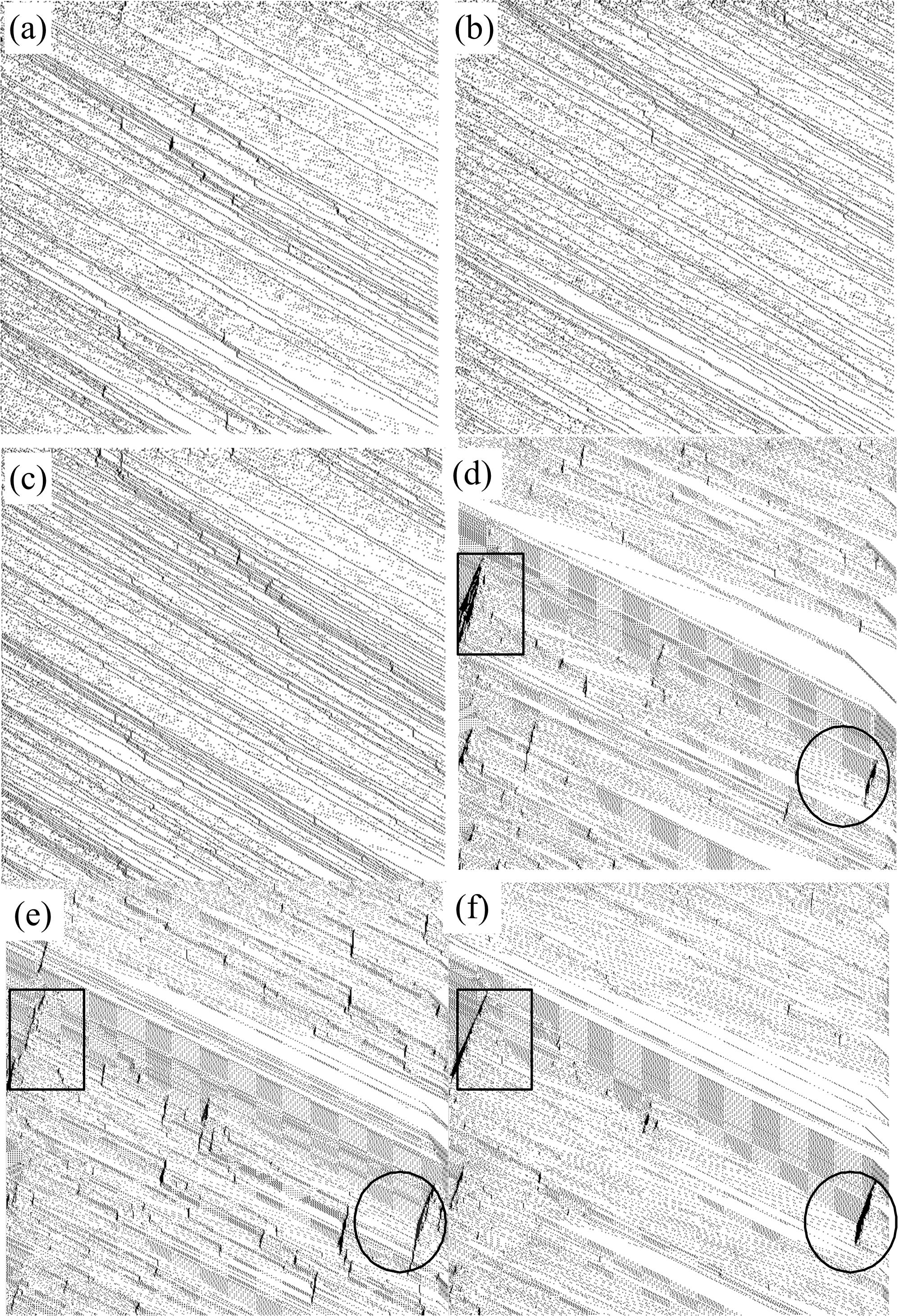 | 图2 换道规则下各车道的时空图Fig.2 Spatio-temporal of each lane under lane-change rules |
对图2(a)(b)(c)中公交车比例及换道次数进行统计发现,在1000 s仿真内,三条车道公交车数分别为64、77和106,换道次数为6678、6243和8749。可以看出,公交车比例的升高会增加社会车辆的换道次数。
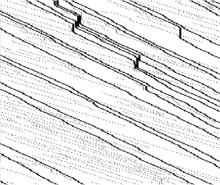
从图3中可以看出,由于公交车速度较低,会阻碍小汽车的前行。黑色线表示的公交车由于速度较低,导致其后边小汽车换道频繁(线条间断说明该车换道)。因此,公交车会影响车流整体的稳定性。由于公交车的最大尺寸为2个元胞,因此在流量为800 veh/h时,道路上车流速度较高,在多数情况下都能满足公交车运行的速度需求,图3中较少发现公交车有换道行为。
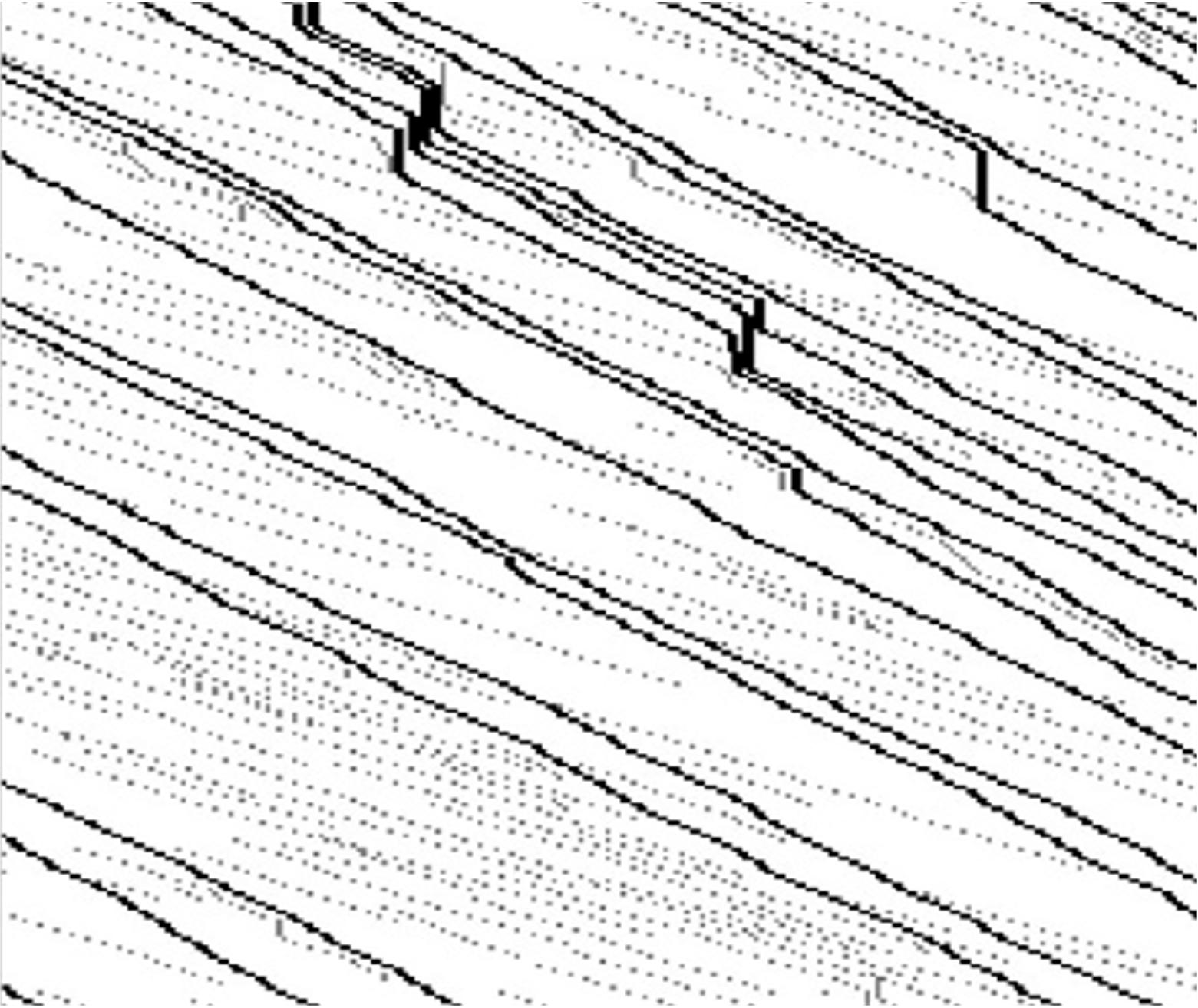 | 图3 图2(a)的局部放大Fig.3 Enlarged of part of fig.2(a) |
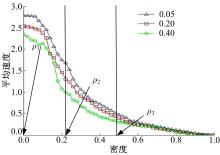
图4为3种公交车比例下的流密度。图中3条曲线分别表示公交车比例在0.05、0.20、0.40情况下的速密曲线。从这3条曲线可以分析出,车流速度随着公交车比例的上升而降低。在模拟中,公交车最大速度为2,小汽车最大速度为3,车流理想平均运行速度为3×小汽车比例+2×公交车比例,即公交车比例为0.05、0.20、0.40时,车流平均运行速度应该为2.95、2.8、2.6。当密度小于0.1时,由于车流基本处于自由流状态,因此平均运行速度较高,接近理想平均运行车速;当密度从
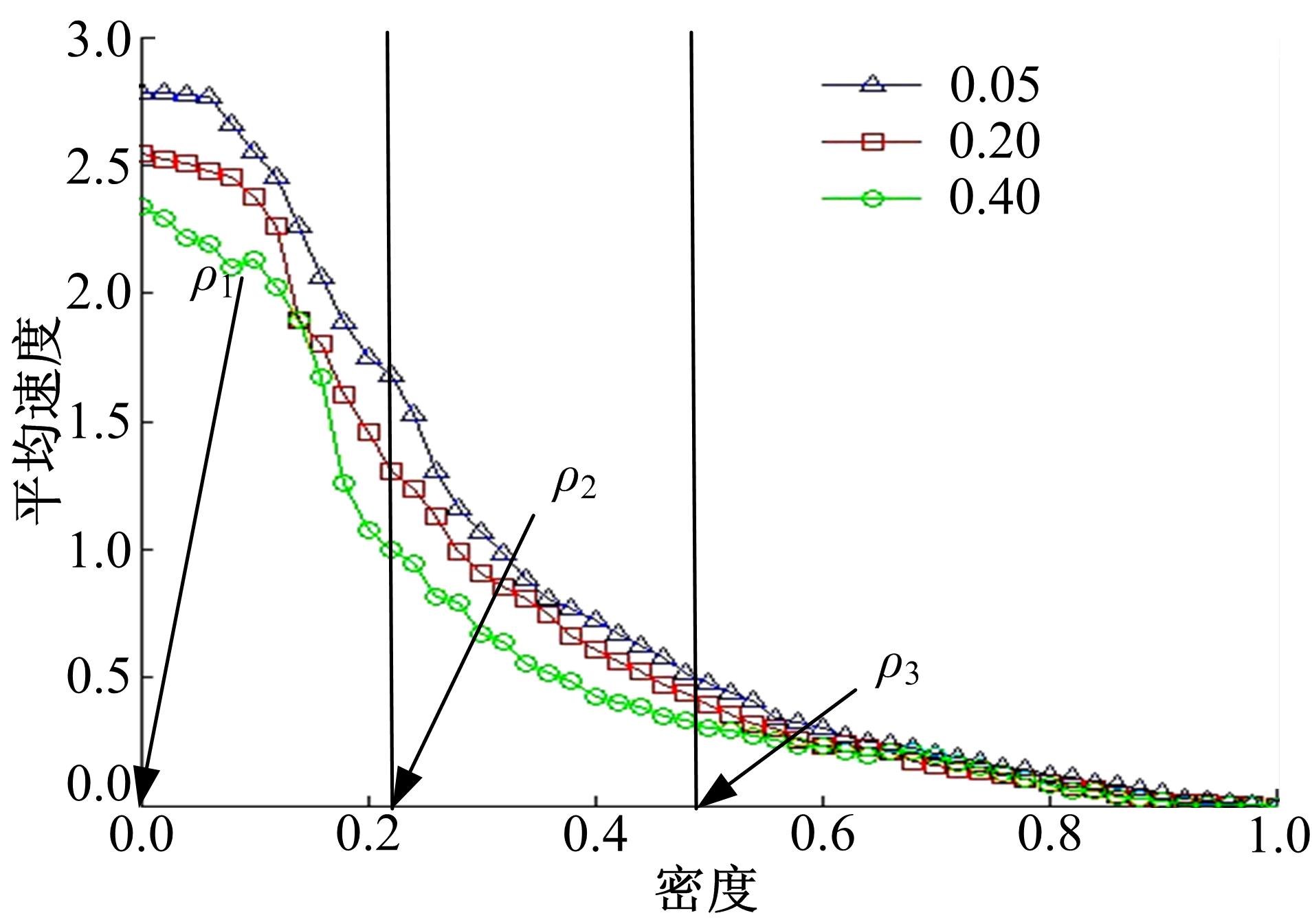 | 图4 3种公交车比例下的速密图Fig.4 Relationship between velocity and density under three different bus rate |
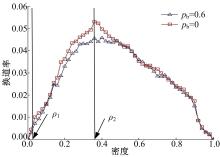
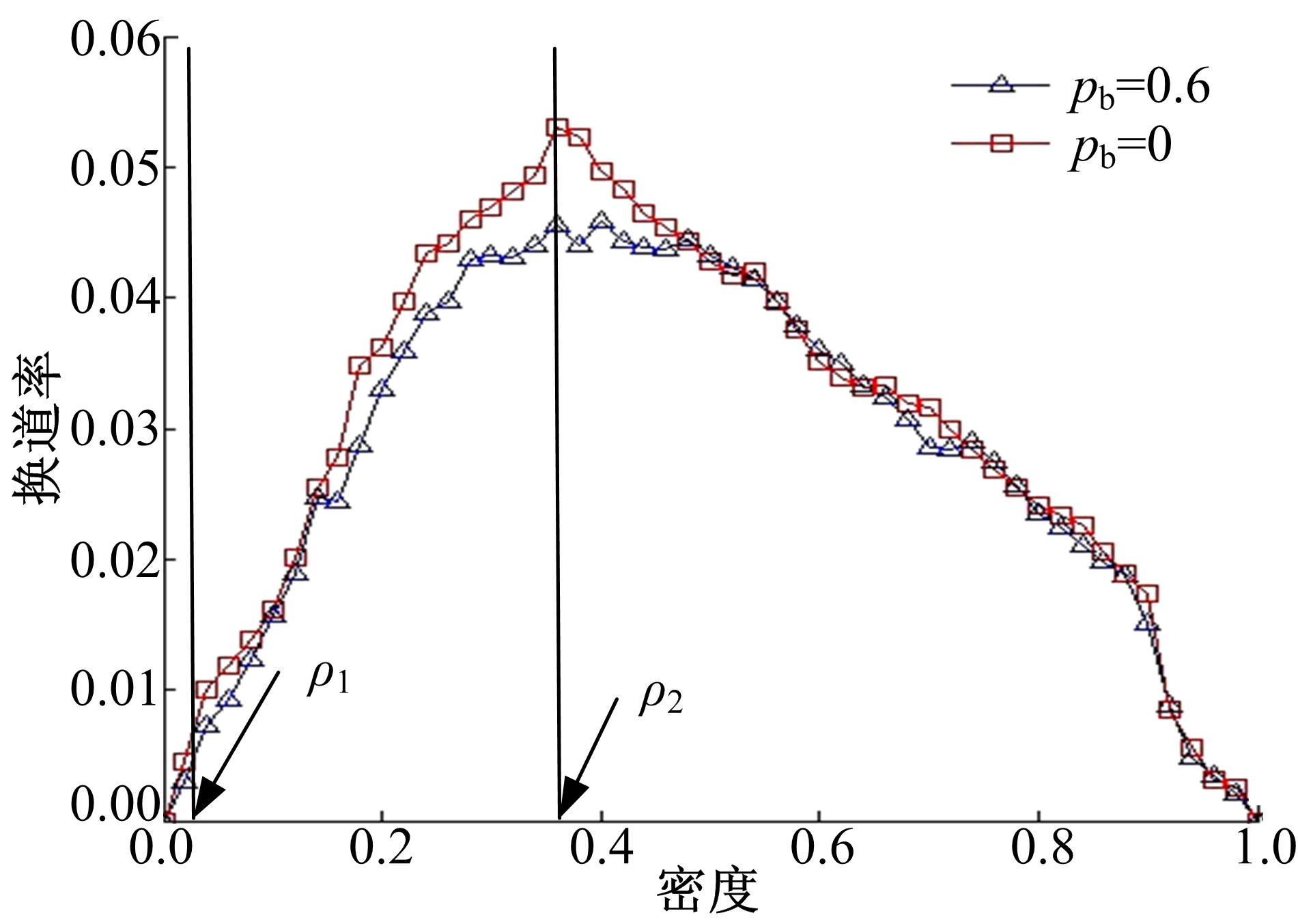
增加了公交车影响因子 pb后,车辆换道行为受到其影响。通过RP调查发现,如果车辆准备超车时发现目标车道后边有公交车,6成左右的驾驶员选择让行公交车。图5为公交车比例为0.2、随机慢化概率 p=0.1、慢启动概率 ps=0.75、公交影响因子 pb分别取0和0.6时的模拟结果图。其中横坐标为密度,纵坐标为统计的换道率,方框线和三角线分别为 pb取0和0.6时的换道率-密度曲线。
 | 图5 换道率与车辆密度关系图Fig.5 Relationship between lane-change and density |
分析图5发现,公交车影响因子的存在会降低换道率。然而,并非在所有密度段这一趋势都明显,当车流密度在
本文研究了公交车的存在对车辆换道行为的影响,提出了考虑公交车影响因子的换道规则,并对该规则进行模拟,分析公交车影响因子对道路车速、换道动机及换道行为的影响。通过模拟结果可以看出,公交车的存在使小汽车换道频率增加;当道路处于中低密度状态时,公交车降低了道路车流流速,但这一现象在高密度车流状态下消失;当换道动机中增加公交车影响因子后,在中低密度下的道路中,公交车影响因子会减少车辆换道概率。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|