



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于双向控制的线控转向系统路感设计
[郑宏宇1  , 宗长富
, 宗长富1 , 何磊1 , 陈国迎1 , 刘明辉1, 2 ]
, 宗长富, 陈国迎|
|


作者简介:郑宏宇(1980-),男,副教授,博士.研究方向:汽车动力学仿真及控制.E-mail:zhenghy@jlu.edu.cn
针对汽车线控转向系统路感需要模拟生成的问题,分析了转向过程中转角和力矩之间的耦合关系,提出了一种新型融合转角和力矩信息的双向控制方法。研究了路感电机和转向电机的控制方法,并参考电动助力转向系统提出了用于转向力传动比设计的助力控制和回正控制方法。通过选取典型工况进行实车试验验证,结果表明:提出的控制方法可以有效地向驾驶员反馈路感,并保证具有汽车良好的回正性能。
As the conventional vehicle mechanical linkages are replaced by Steer-by-Wire (SBW) with electronic control, the driver is unable to sense the road information. A novel steering wheel torque and pinion angle feedback method is proposed with bilateral control structure. The design goal for SBW system is to allow the driver to match and set the dynamic relationship between steer angle and reactive torque input. Refer to electric power steering system, a steering force ratio is designed, which the road feel motor and steer motor control to improve the driver's steering feel according to the assistant control and return control methods that are used in the control logic. Vehicle experiments demonstrate that the proposed control methods can effectively feedback the road information to the driver, ensuring the vehicle's good returnability.
汽车线控转向(Steer-by-wire,SBW)系统取消了转向盘与转向车轮之间的机械连接,其转向角传动比和路感可以自由设计,极大地提高了汽车转向性能[ 1]。然而,这也带来了转向路感需要模拟生成的问题。
目前的SBW路感研究主要分为两类:一是参数法,这种路感实现方法相对简单且可以反映车辆运动状态,但是与传统转向汽车路感存在差别,需要驾驶员适应[ 2]。二是采用复制传统转向路感[ 3, 4],但是该类方法存在许多系统参数难以直接获取的问题。因此有的学者提出通过建立观测器获取与路感密切联系的齿条力或回正力矩等信息[ 5, 6],但是该方法需要考虑观测器的实时性和精度之间的耦合性。
此外,SBW系统的角传动比一般设置为变传动比,转向过程中角传动比和路感同时变化且相互影响,这会严重影响系统稳定性和控制精度,对路感设计也带来了很大困难。Sugita等[ 7]建立了包括汽车转向和路感信息的动力学模型,但研究结果表明该方法中角传动比变化对路感有很大影响,对驾驶员在转向过程的舒适性也会造成影响,严重时甚至影响驾驶安全性。
综上,如何在角传动比变化时保证路感的稳定性和精度有待进一步研究。考虑到遥操作机器人系统在结构和工作原理上与SBW系统有类似之处,本文通过分析遥操作机器人系统中广泛应用的双向控制技术[ 8],提出了一种适用于SBW系统的双向控制结构,通过建立转角和路感之间的内在联系,在融合角传动比的基础上实现路感反馈,同时保证该方法不需要获取车轮与路面相互作用力,从而减少了系统复杂性。最后通过实车试验对本文控制方法的有效性进行了验证。
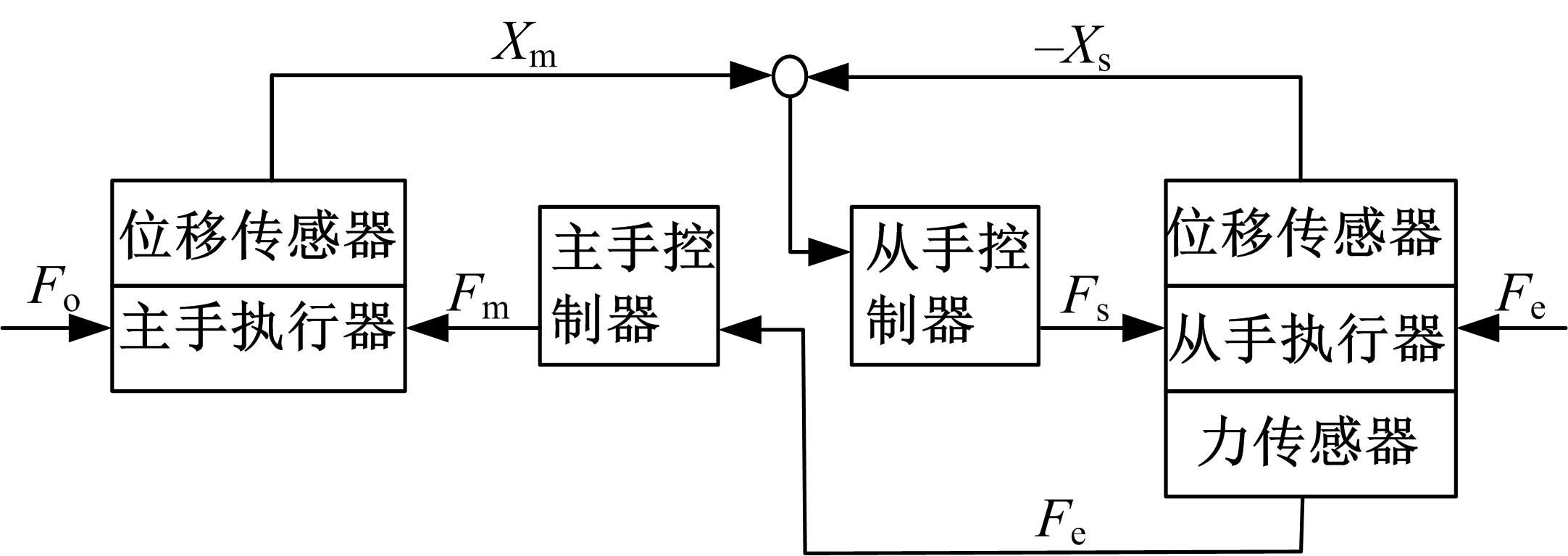
双向控制理论常应用于遥操作机器人研究领域,可以实现遥操作机器人主控和被控系统之间的力和位置信息交互反馈控制。一般适用于双向控制的系统主要分为操作者、主操纵机构、通信环节、从操纵机构和外界环境5个部分,如 图1所示。
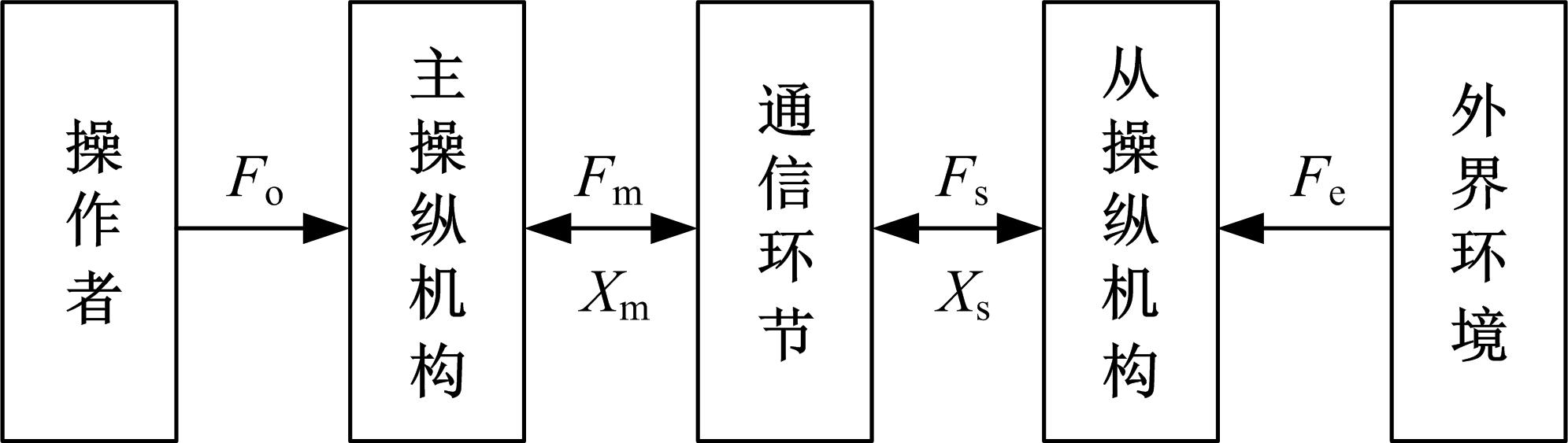 | 图1 双向控制系统典型结构Fig.1 Bilateral control system |
图1中: Fo为操作者输出的力指令; Fm和 Xm为在操作者作用下主操纵机构产生的力和位置信息,该信息通过通信环节发送给从操纵机构; Fs和 Xs为从操纵机构根据指令产生的力和位置信息,该信息通过通信环节反馈给主操纵机构; Fe为从操纵机构和外接环境产生的交互信息。
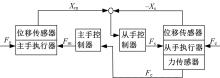
从 图1的系统接口可知,主、从操纵机构均有力和位置信息,而如何将两种信息进行有效融合,可以有多种控制策略。 图2是一种典型的遥操作机器人主、从操纵系统的力反馈-位置差型控制策略。
 | 图2 力反馈-位置差型控制策略Fig.2 Force feedback and position deviation control strategy |
 | 图3 转矩差-转角反馈型控制策略Fig.3 Torque deviation and angle feedback control strategy |
该控制策略的最大优点是位置环路采用闭环控制,以保证控制的精度,同时将从手机构的力信息直接反馈给操作者,这种反馈的路感是最真实的信息,但是该方法的缺点是:当 Fe值过大或产生力冲击时,会影响操作者的操纵舒适性,甚至会由于操纵困难而导致安全隐患。此外, Fe的具体信息也不易获取,因此不适用于汽车SBW系统。
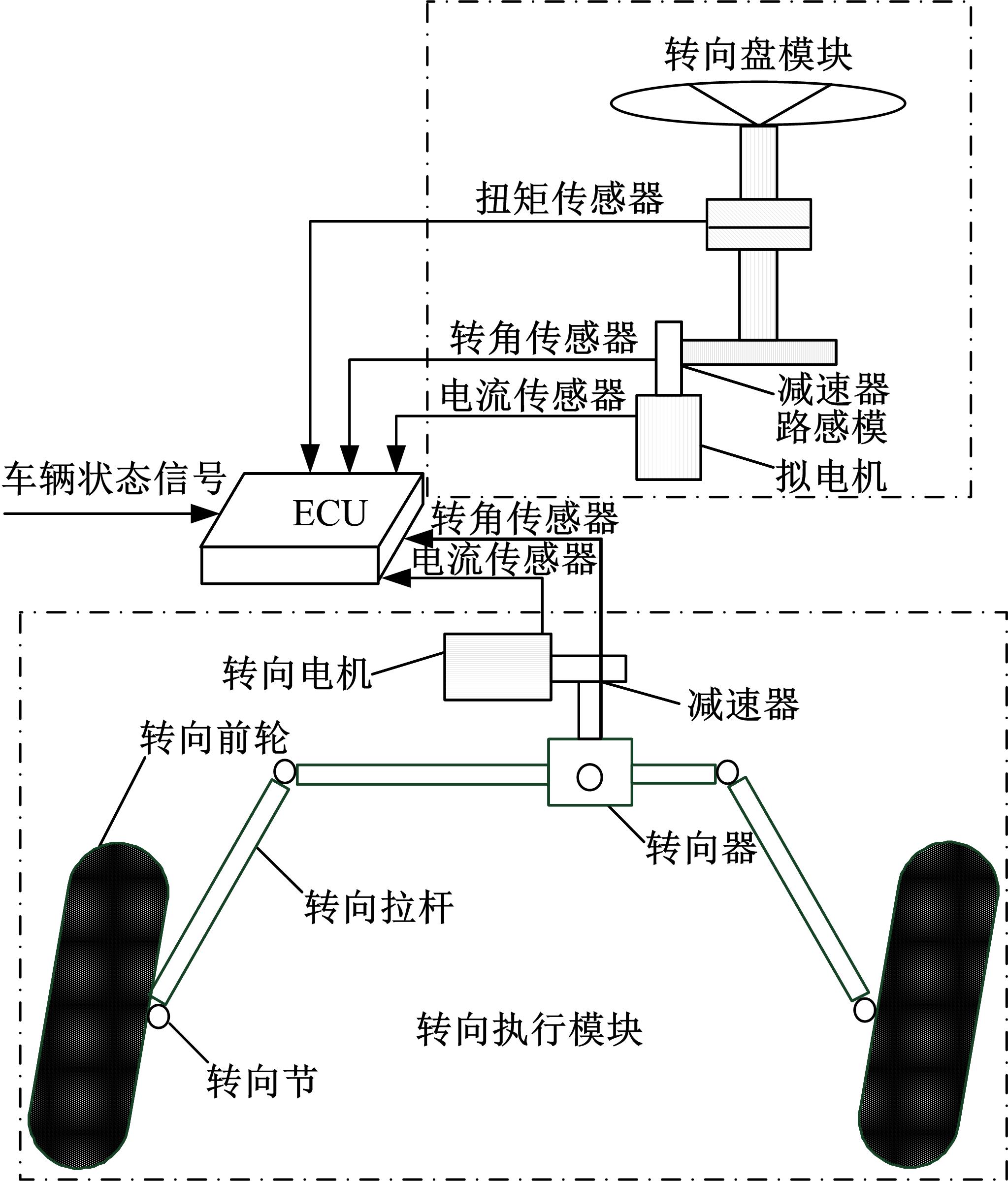
本文提出了如 图3所示的转矩差-转角反馈的双向控制策略。该控制策略的提出是基于SBW系统的结构特点也可以认为是遥操作系统。其中,转向盘模块为主执行器,转向执行模块为从执行器,二者之间通过线控交互转角和力矩信息。
具体控制流程是将齿轮齿条转向器中的齿轮转动角度反馈给驾驶员,由驾驶员发出力矩指令控制转向电机,从而实现车轮转动。这种结构的特点是:当系统初始化时,SBW系统将根据车轮当前位置控制转向盘转角处于合理的初始位置;当转向回正时,驾驶员的输入一般为零,转向执行模块控制车轮回正,这也符合传统转向系统的回正功能,并易于通过SBW系统进行功能实现。
SBW系统主要执行机构包括路感电机和转向电机,前者用于实现路感反馈,后者用于车轮转动。两种电机由于用途不同其控制方法也不同。具体控制方法如下。
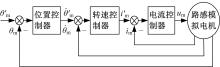
路感电机是根据转向盘转角和小齿轮转角的差值确定,电机控制过程中受到系统惯量、阻尼等许多因素干扰,这会影响电机输出力矩的精度,同时在驾驶员转向过程中也会有力矩波动和滞后等问题,严重影响手感。因此,结合SBW系统的特点,设计三层闭环控制方法实现对路感电机的控制,该方法的优点是闭环控制,同时考虑路感电机的电流和转速,可以提高电机控制中的响应时间和力矩平滑,既有利于提高转向路感,也可以增加系统的鲁棒性。其控制框图如 图4所示。
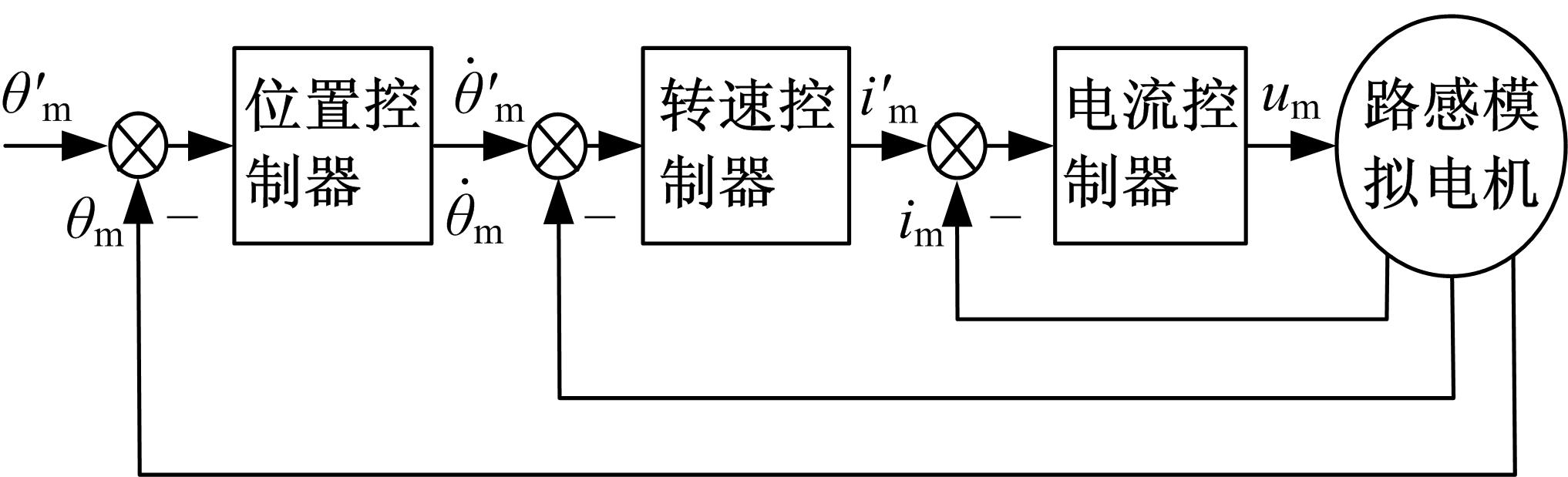 | 图4 路感电机控制方法Fig.4 Road feel motor control method |
图4中, θ'm为目标路感电机转角; θm为实际路感电机转角;
转向电机由驾驶员输出力矩作为目标指令进行控制。电机电流与力矩的关系可以等效表示为:
式中: i'p为转向电机目标电流; Kp为电机力矩系数; Ts为驾驶员输入转矩; rm为减速器减速比; α为等效力传动比,可通过助力特性得到。
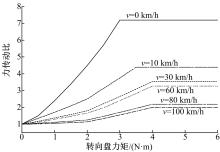
为了便于控制实现,将SBW系统路感等效设计为力传动比参数,其概念与角传动比近似,考虑驾驶员对传统转向系统的适应性,这里参考电动助力转向(Electric power steering,EPS)进行设计。基于提出的双向控制结构,根据驾驶员力矩和转向电机力矩的增益值设计力传动比。该力传动比与汽车行驶速度、驾驶员力矩有密切联系。当汽车低速行驶时,增大力传动比可以提高转向轻便性。随着车速的提高,力传动比逐渐降低,保证驾驶员路感的稳定性。力传动比设计采用EPS系统中广泛应用的折线形助力曲线,最终得到的力传动比曲线如 图5所示。
 | 图5 变车速下的力传动比Fig.5 Force ratio of variable vehicle speed |
力传动比可以实现变车速下的助力控制,如果要满足SBW系统路感与传统转向系统相近的要求,还需要增加回正控制模块,一方面保证转向盘低速可以回到中心位置;另一方面保证高速回正的超调量较小。具体控制流程为:首先判断车辆是否处于回正工况,如果转向器齿轮转角方向与转向盘转动方向相反则为回正工况。为了防止误判断,设定限值,只有当齿轮转速大于限值时,才激活回正控制;当进入回正控制时,通过闭环控制实现齿条转角对转向盘转角的跟随,同时针对车速的影响施加补偿。
由于实车布置空间和载荷对于试验样车的改装都有重要影响,因此试验样车由传统匹配有EPS系统的A级两厢乘用车改装,转向电机由小齿轮式EPS系统改装,路感电机由转向柱式EPS系统改装。试验选取回正和连续正弦转向试验两种典型工况对控制策略进行验证。
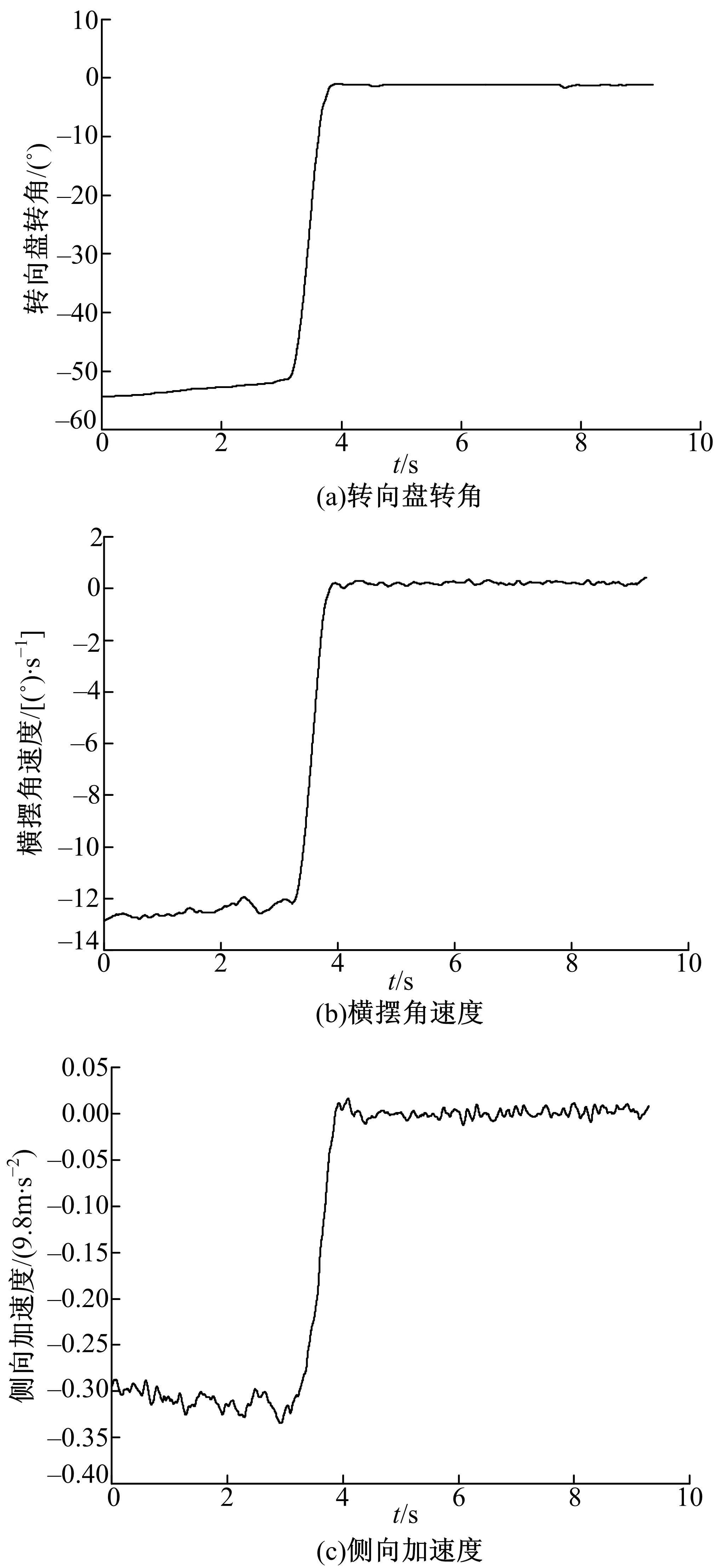 | 图6 转向盘转角、横摆角速度和侧向加速度实车实验变化曲线Fig.6 Steering angle,yawrate,lateral acceleration in vehicle test |
由于SBW系统需要完善的故障诊断保护功能,考虑到安全和场地限制因素,这里进行了车速为50 km/h的回正试验。 图6为转向盘转角横摆角、速度和侧向加速度随时间的变化曲线。从图中可以看出,转向盘转角在回正过程中回到了中心位置且没有超调和波动现象,同时整车横摆角速度和侧向加速度也都回到了零点,验证了控制方法的有效性。
进行典型车速下的连续正弦转向试验,考察系统的路感反馈情况。为了满足驾驶员在传统转向系统下的驾驶习惯,SBW系统通常保留一定的干摩擦,该干摩擦可以任意调整。 图7分别为车速60 km/h和80 km/h的试验结果。
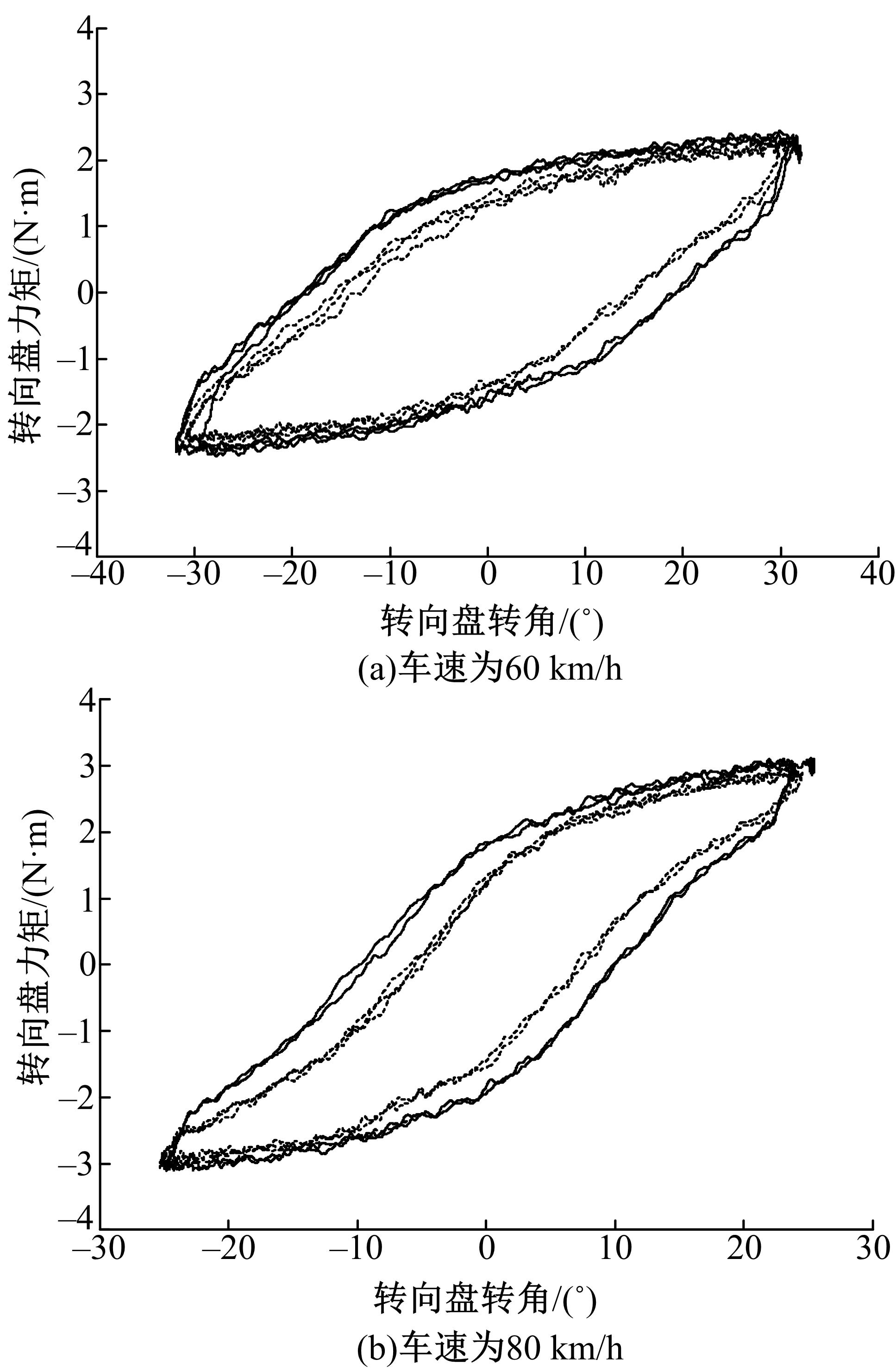 | 图7 不同车速下的连续正弦试验Fig.7 Continuous sinusoidal test by different speed |
不同车速下的连续正弦试验结果表明:本文提出的路感模拟方法可以为驾驶员提供良好的路感,特别是随着车速的增加,路感也逐渐增强,这也符合传统转向系统路感设计要求和驾驶员需求。
(1)提出了一种新型力反馈/位置型的SBW系统双向控制结构,实现了汽车在转向过程中通过线控来交互转角和力矩信息,为转向路感的研究提供了新方法。
(2)研究了三层闭环控制的路感电机控制方法,提高了路感电机的响应时间和力矩精度,保证了路感控制的鲁棒性。
(3)设计了包含回正控制功能的SBW系统力传动比,并通过实车试验验证了其有效性。结果表明:提出的控制方法保证了整车回正性能,并能够向驾驶员反馈有效的路感信息。连续正弦试验结果表明:所提出的控制算法可以较好地保证汽车在中高速下的路感反馈。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|