
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
多段式自动泊车路径规划及其关键技术
[钱立军1  , 胡伟龙
, 胡伟龙1, 2 , 刘庆3 , 吴冰1 ]
, 胡伟龙|
|


作者简介:钱立军(1962-),男,教授,博士生导师.研究方向:车辆电子,车辆控制.E-mail:13635601581@139.com
为了设计一种在泊车过程中较连贯且计算量少的泊车路径,提出了泊车过程中方向盘匀速转动的策略。首先推导出车辆低速行驶时,匀速转动方向盘时后轴中心点的运动轨迹。然后将泊车过程分为5个阶段,按照避障条件求解出最优化的路径参数。设计了基于PID闭环反馈的车速控制系统,并通过试验得出实际车速对预期车速的跟踪效果良好的结论。通过泊车控制器模拟出EPS控制器需要的转矩传感器信号,设计了方向盘转速控制系统,利用系统辨识的方法得到转矩与转速的关系,并通过试验发现辨识得到的转矩与实际转矩的拟合度在96%以上。通过比较五段式泊车和两段式泊车过程中的车速、转角、油门控制量、刹车控制量随时间的变化关系,可以看出五段式泊车过程更加连贯。
A strategy to turn the steering wheel uniformly while parking is put forward to design a parking path with more consistency and fewer calculations. First, the trajectory of the center point on rear axle is deduced while the vehicle is driven at low speed and the steering wheel is turned uniformly. Second, the parking process is divided into five stages and the parameters of the optimized path are obtained according to obstacle avoidance. Third, the vehicle speed control system based on the PID closed-loop feedback theory is designed, and experiments show that the real speed matches the expected speed. Fourth, the signal of the torque sensor needed by EPS controller is simulated by parking controller; then the steering wheel rotational speed control system is designed, and relationship between the torque and rotational speed is obtained by system identification. Experiments show that the degree of fitting between torques given by system identification and real torques is above 96%. Finally, the change of vehicle speed, rotating angle of the steering wheel, accelerator and brake of two segment parking and five segment parking are obtained. Comparison of two segment parking and five segment parking shows that five segment parking has higher consistency.
自动泊车系统能够降低驾驶员的操作负担, 减小泊车事故发生率。目前, 泊车外部环境建模技术已经比较成熟, 主要是基于超声波雷达测距和双目成像原理建立泊车外部环境[1, 2]。研究热点主要集中在泊车路径的规划, 主要有3种路径规划方式:文献[3, 4, 5]采用模糊控制的策略, 提出了来回多段移动式的泊车路径规划方法; 文献[6, 7, 8]提出了基于B样条曲线、五次多项式曲线、贝塞尔曲线等曲率连续的泊车路径规划方法; 文献[9]提出了由圆弧和直线组成的曲率不连续的泊车路径规划方法。
基于模糊控制策略及曲率连续的路径规划方法, 泊车过程中不需要停车转动方向盘, 但是计算量较大; 基于曲率不连续的路径规划, 特别是两段式泊车路径规划方法计算量小, 但是泊车连贯性低[10]。文献[11]提出了采用缓和曲线线型进行路径规划, 将泊车路径分为七段, 但未做深入研究。本文在此基础上提出采用曲率连续的五段曲线构成泊车路径, 假设方向盘匀速转动且车辆后退速度恒定, 并对车速和方向盘转速进行了跟踪控制。
因为车辆后轮与车身运动方向一致, 后轮轨迹在车体运动过程中能完全体现车体的运动特征, 所以用后轮轴线中心点的轨迹来代表泊车轨迹。根据文献[12], 车辆在低速运动时, 不计车轮的侧向滑动, 车辆后轴中心点的瞬时半径R=lcotψ , 其中l为汽车的轴距; ψ 为车辆瞬时Ackerman转角。
下面来讨论方向盘匀速转动时车辆后轴中心点的轨迹。由于电机的启动加速时间在毫秒级别, 此时车辆走过的距离也在厘米级别, 所以可以不考虑电机的启动加速时间。
方向盘以角速度ω 匀速转动, 即ψ =kω t, 其中k为Ackerman转角与方向盘转角之比(本文取1/15), 定义车辆后轴中心点的坐标为(
于是车辆后轴中心点轨迹的方程为:
可以在Matlab中调用ode45求解方程(2), 带入初始条件:
y=dsolve(‘ Dy=odefun1’ , ‘ y(0)=0, Dy(0)=15’ , ‘ t’ )
x=dsolve(‘ Dy=odefun2’ , ‘ y(0)=0, Dy(0)=15’ , ‘ t’ )
解得y=F1(t), x=F2(t)以及该轨迹在t时刻与x轴的夹角ψ (t):ψ (t)=F'1(t)/F'2(t)。
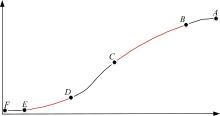
如图1所示, 开始泊车时刻, 车辆后轴中心点所在位置定义为A点, 车辆的初始姿态角为θ , 开始时车辆轮胎状态为回正状态。
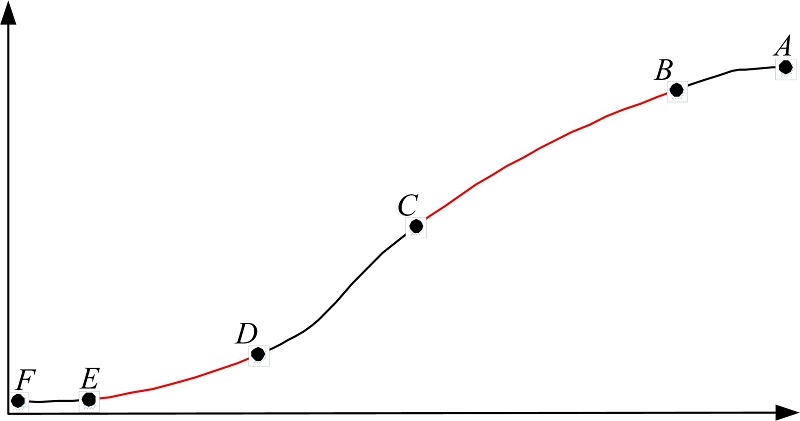 | 图1 泊车过程路线示意图Fig.1 Diagrammatic sketch of parking route |
泊车第1阶段, 泊车控制器控制车辆以速度
泊车第2阶段, 车辆以速度
泊车第3阶段, 车辆以速度
泊车第4阶段, 车辆以速度
泊车第5阶段, 车辆以速度
以上泊车过程中车身姿态角随时间变化, 记车身姿态角为
式中:
以A点为坐标原点, 在泊车过程中车辆后轴中心点的坐标也随着时间不停变化, 记后轴中心点的X轴坐标为xo(t)、Y轴坐标为yo(t), 则根据几何关系有:
在每一个阶段有车辆的前右顶点Pfr、前左顶点Pfl、后右顶点Prr、后左顶点Prl的坐标分别为:(xfr, yfr)、(xfl, yfl)、(xrr, yrr)、(xrl, yrl), 记车辆前悬为wf; 车辆后悬为wr; 车辆宽度为lv, 根据几何关系有:
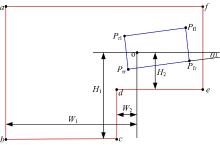
记A点到车位左侧距离为W1; A点到车位右侧距离为W2; A点到车位上部距离为H1; A点到车位下部距离为H2 。于是可以用点a~f组成的空间作为泊车过程中的避障空间(见图2), 即只要车辆的4个顶点始终在避障空间内, 就不会发生碰撞。点a~f坐标分别为
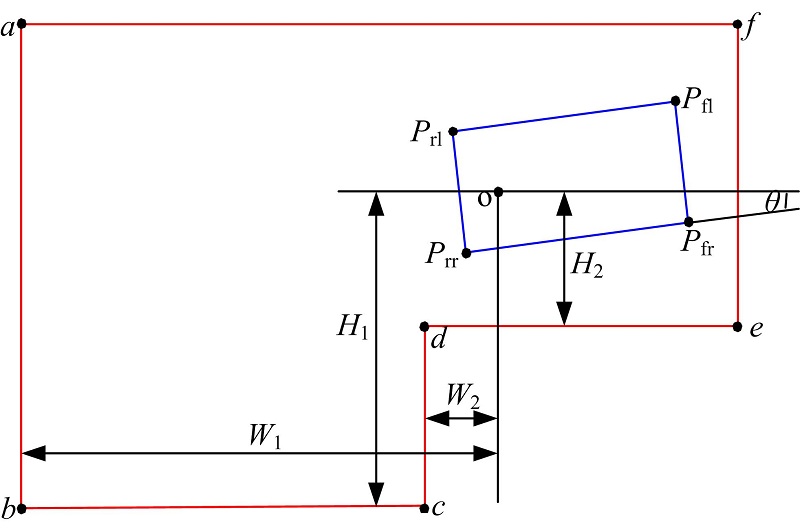 | 图2 泊车过程中的避障空间Fig.2 Obstacle avoidance space in process of parking |
在泊车结束后的
同时根据车辆后轴中心点坐标变化有:
通过联立式(4)(5)(7)(8)可以得到方向盘转动的角速度ω 与第一次圆周运动的圆心角m、车速v之间的关系为:
从式(9)可以看出:
根据简化, 车辆的4个顶点始终在避障空间内只需要满足以下条件:
在Matlab中让
本文设计的低速控制系统结构如图3所示。该系统以期望车速和实测车速间的偏差最小为控制目标, 使用PID控制算法确定控制量, 即油门的开合和制动踏板的切换, 以实现车速的增、减变化。
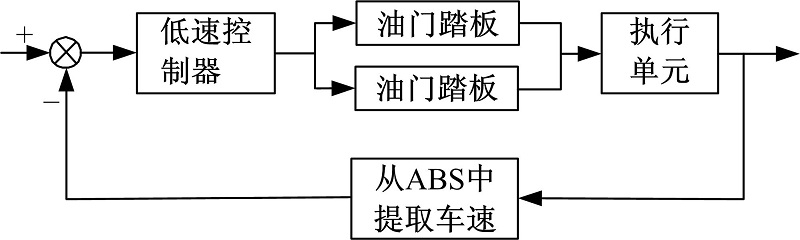 | 图3 低速控制系统结构图Fig.3 Structure chart of low speed control system |
期望车速与实测车速间的偏差为:vd=vp-vr, 其中vd为期望车速与实测车速间的偏差, vp为期望车速; vr为ABS实测车速。设控制量为u, 根据PID理论有:
式中:KP、KD、KI分别为控制器的比例、微分和积分系数; u大于0, 表示车辆需要进行加速操作, u小于0, 表示车辆需要减速操作。
车辆的加、减速操作对应的油门的开合和制动踏板的切换关系在文献[13, 14, 15]中有具体阐述。
文献[16]中, 方向盘转速的控制是通过在方向盘上安装转向电机实现, 或者在EPS系统中加装方向盘转角传感器通过闭环调节来达到预期的转速, 这些方法在试验中可行, 大规模的生产中受到安装和成本的制约。
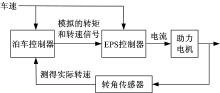
设计转向控制系统的结构如图4所示, EPS只接受车速和转矩传感器的信号。泊车控制器根据方向盘实际转速与期望的转速之差、车速产生模拟的转矩和转速信号; EPS控制器根据模拟的转矩和转速信号产生助力电机所需要的电流, 从而达到闭环控制转速的目的。
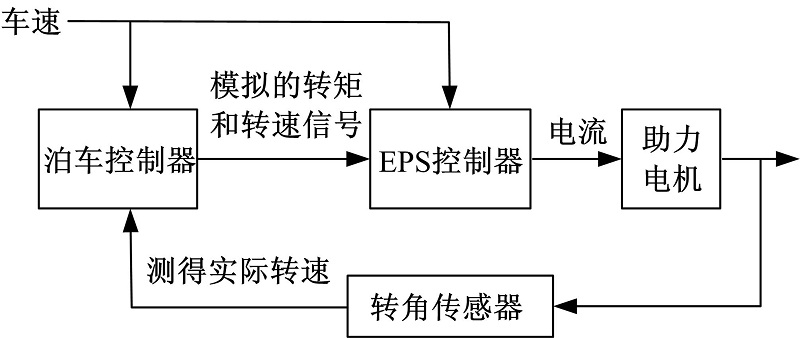 | 图4 转速控制系统结构图Fig.4 Structure chart of revolving speed control system |
这套方向盘转角控制方法的优势在于充分利用现有EPS系统的硬件结构, 不改变EPS系统的原有程序, 只是将转角传感器测得的信号输入到泊车控制器, 然后将利用接口程序产生的模拟转矩传感器的信号输入到EPS控制器当中, 这大大减少了硬件成本和开发成本。
泊车阶段, 转矩传感器测量会发生各种超调, 导致测量结果不准确, 所以在此阶段, 转矩传感器是处于被屏蔽状态。这就需要使用转角传感器测得转角, 再利用转角与转矩之间的关系模拟出转矩传感器的信号作为EPS的一个输入。转角与转矩之间的关系, 一般使用多次试验, 用系统辨识的方式给出。
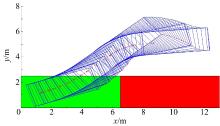
仿真分析以某型轿车为例, 该车车长为4.315 m; 宽为1.783 m; 轴距为2.630 m; 前悬为1.030 m; 后悬为0.685 m;
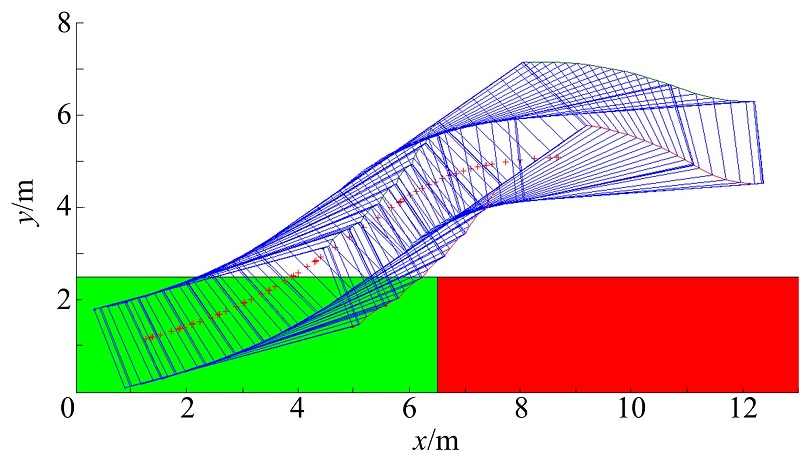 | 图5 最优泊车路径Fig.5 Optimal parking path |
经过多次尝试得到该型号轿车低速行驶情况下, 控制量
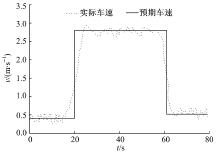
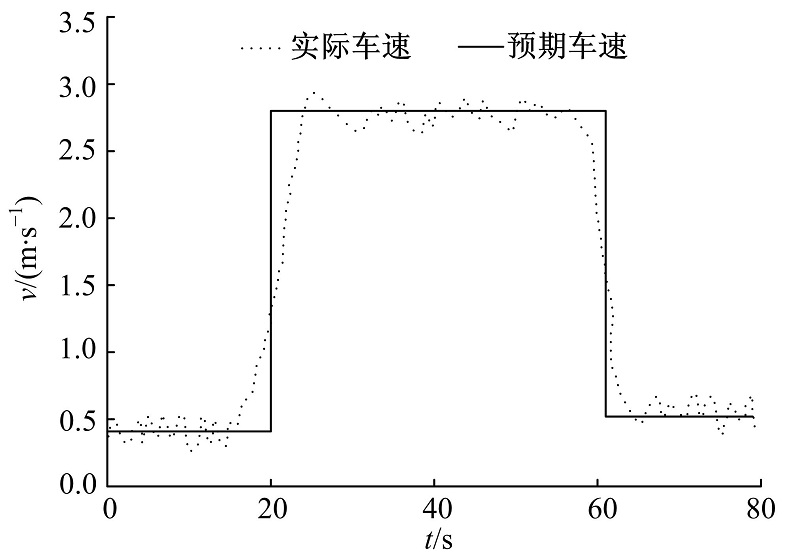 | 图6 实际车速与预期车速对比Fig.6 Comparison of actual speed and expected speed |
从图6可以看出, 车辆低速行驶时速度跟随效果良好, 基本可以满足泊车精度要求。
采用统计的方法来辨识转角与转矩之间的关系。这里采用的统计方法是在方向盘上加装电机, 利用转矩传感器测量转矩信息, 在不同的车速和方向盘转角、方向盘转速下得到转矩结果, 经过统计, 得到不同方向盘转角、方向盘转速和转矩的辨识结果如式(11)所示:
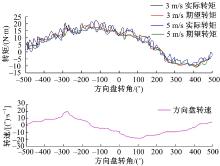
图7为在车速分别为3 m/s和5 m/s时的系统辨识的结果。其中实线是实际测得的力矩大小, 虚线是经过辨识后预期的力矩大小。计算得到, 车速为3 m/s时, 实际力矩与预期力矩的残差平方为0.132, 拟合度为0.965; 车速为5 m/s时, 实际力矩与预期力矩的残差平方为0.156, 拟合度为0.982。从图7也可以看出, 实际力矩对预期力矩的跟踪效果良好, 所得到的模型是非常切合实际的。
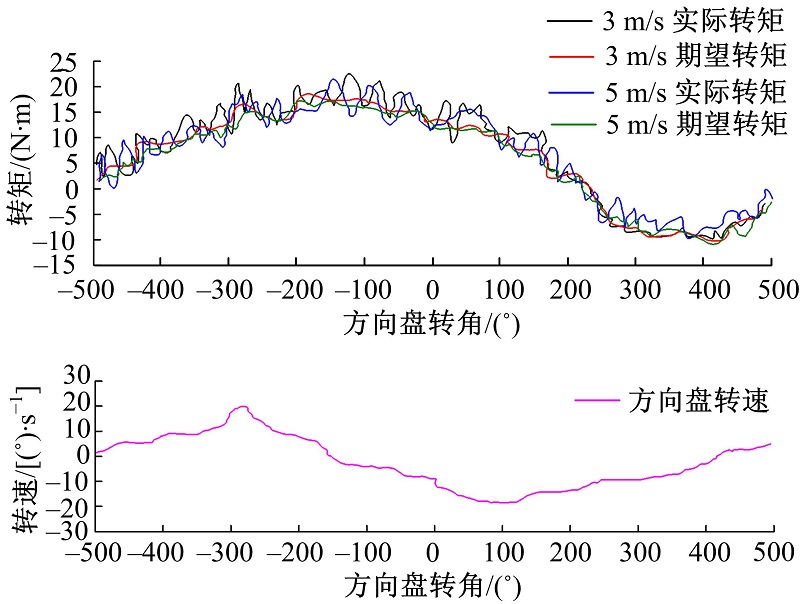 | 图7 力矩与转速关系的系统辨识图Fig.7 System identification for relationship between torque and rotational speed |
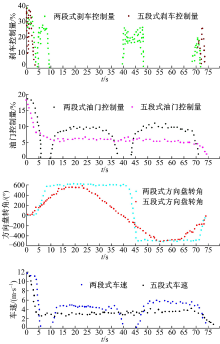
对本文的五段式泊车与市场上比较成熟的两段式泊车的车速、方向盘转角、油门踏板的行程、刹车行程随时间的变化情况进行了对比, 结果如图8所示。
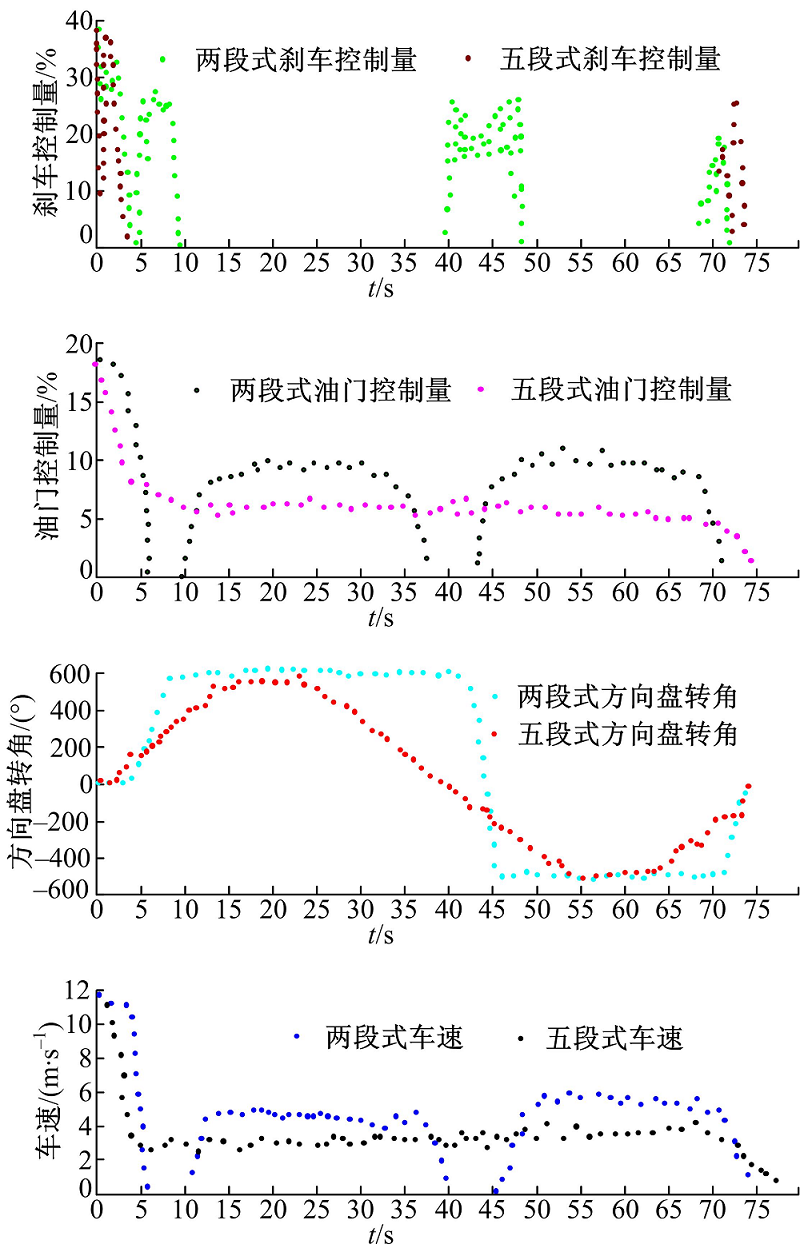 | 图8 车速、方向盘转角、油门及刹车控制量随时间变化Fig.8 Change of vehicle speed, steering wheel angle, accelerator and brake with time |
从图8中可以看出:使用五段式泊车, 车速、转角和油门的变化比较平缓, 刹车过程只发生在开始和结尾阶段, 说明整个泊车过程比较平缓且连贯性良好; 而使用两段式泊车时, 车速频繁变化, 需要频繁切换刹车和油门, 且方向盘转动比较急促, 乘坐舒适性较低。
(1)研究了车辆低速行驶、方向盘匀速转动时, 车辆后轴中心点的轨迹, 得到了后轴中心点X坐标、Y坐标和切角的轨迹方程。
(2)基于方向盘匀速转动下车辆的轨迹方程设计了泊车轨迹, 泊车过程分为5个阶段, 并且基于车辆避撞要求提出了求解泊车轨迹中参数的方法。仿真结果验证了轨迹及求解参数方法的正确性。
(3)基于速度恒定设计基于PID反馈调节的车速恒定控制器, 试验证明速度跟踪效果良好。基于车辆方向盘转速恒定提出了基于负反馈的转速控制系统, 该系统充分利用了EPS原有的资源, 其中力矩与转速的关系也得到了试验验证。
(4)通过试验表明了整个泊车过程平稳、连贯性良好、乘员舒适性较好。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|