








{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
崎岖地形环境下四足机器人的静步态规划方法
[张帅帅1  , 荣学文
, 荣学文1 , 李贻斌1 , 李彬2 ]
, 荣学文, 李贻斌|
|


作者简介:张帅帅(1986-),男,博士研究生.研究方向:四足机器人,智能控制系统.E-mail:zhangshuaisdu@163.com
为了使四足机器人能够通过姿态调整提高其自身的地形适应性,给出了机器人姿态调整角的计算方法。四足机器人在行走过程中通过躯干的摆动增加稳定裕度,并使用五次曲线对躯干运动轨迹进行规划,保证了整个运动过程的连续性。另外,为克服机器人无法获取地形信息的不足,规划了一种矩形摆动足足底轨迹。仿真实验结果表明:使用提出的静步态规划方法,四足机器人可以在未知地形信息的情况下,实时、自主、稳定地通过复杂度较高的崎岖地形。
In order to improve the ability of quadruped robots to cross rough terrains, a static gait planning method is proposed. This method consists of three parts: the posture adjustment planning, the body trajectory planning and the foot trajectory planning. To improve the adaptability of the quadruped robot to the terrain through the posture adjustment, a method to calculate the pitching angle is proposed. The robot can obtain enough stability margin through a body sway motion, and the continuity of movement during the whole walking process can be guaranteed by using a quintic body trajectory. In addition, a box shape foot trajectory planning method is given to overcome the situation that the robot can not obtain the information of the terrain. Using the proposed static gait planning method, the robot can autonomously navigate through unknown irregular terrains with sufficient stability margin in real time.
四足机器人能够在崎岖度较高, 甚至是一些对于轮式和履带式机器人无法跨越的复杂地形上行走[1]。在四足机器人的诸多研究领域中, 机器人的步态规划是最基本、最重要的方面之一。一个鲁棒性强的步态能够帮助机器人顺利地通过多种类型的崎岖地形, 尤其是那些非结构化的复杂地形。
为顺利通过崎岖度较高的地形, 四足机器人一般选用静步态来增大自身的稳定性。在静步态研究方面, McGhee等[2]首先给出了四足机器人静步态的数学描述。之后, 国内外许多学者提出了四足机器人静步态规划的方法。其中, 比较典型的有:Lee等[3]提出的静步态规划方法, 并详细分析了机器人使用静步态行走时的稳定性; 针对“ Little Dog” 机器人进行的相关静步态规划[4, 5, 6, 7]; 黄博等[8]对机器人爬越楼梯时的静步态进行了规划; 王鹏飞[9]根据机器人在迈步阶段躯干是否移动, 将四足机器人的静步态分为间歇爬行步态和连续爬行步态, 并对这两种步态的稳定性等方面进行了规划和分析; 冯华山等[10]对四足机器人在坡面静步态平衡方法进行了相关的研究, 着重分析了四足机器人在坡面行走的过渡状态下姿态的变化情况以及稳定行走的方法; 高彬[11]对四足机器人使用静步态进行全方位转向做了相关研究。
现有的四足机器人静步态规划中, 有的只规划了机器人躯干在前进方向上的运动[3, 8, 9, 10, 11], 这种情况下, 机器人在行走过程中稳定裕度相对较小; 有的虽然增加了侧向移动但是不能保证机器人的重心一直向前运动[4], 降低了机器人的平均运动速度和能量利用效率; 有的没有结合姿态调整和足底轨迹规划以提高机器人跨越复杂地形的能力[3, 5, 9]。
针对以上不足, 本文给出了一种四足机器人静步态生成方法, 提出了具有较好地形适应性和鲁棒性的躯干运动轨迹规划方法、足底轨迹规划方法以及姿态调整方法。根据四只支撑足的位置以及躯干的姿态信息, 给出了机器人躯干运动轨迹的规划方法, 本文方法既能有效增大机器人的稳定裕度, 又能保证机器人在运动过程中躯干一直向前运动且运动速度和加速度连续, 从而在保证机器人静态稳定性的前提下, 提高机器人的平均运动速度及能量利用率。为保证四足机器人的摆动足具有足够的有效工作空间, 以使机器人能够跨越更高的障碍物, 本文提出了一种姿态调整方法, 提高了四足机器人的地形适应性; 另外, 本文给出的摆动足足底轨迹规划方法, 使机器人在不能获知地形信息的情况下, 依然能够保证摆动足顺利摆动至目标落足点。仿真实验验证了本文方法的正确性和有效性。
具有一定的静态稳定裕度是四足机器人在使用静步态行走时的基本要求, 尤其是当四足机器人行走在崎岖度较高的地形上时。
为了准确而有效地衡量机器人的静态稳定性, 目前存在多种稳定裕度的计算方法, 例如纵向稳定裕度(Longitudinal stability margin)[13]、绝对稳定裕度(Absolute stability margin)[14]、能量稳定裕度(Energy stability margin)[15]等。在这些稳定裕度计算方法中, 绝对稳定裕度的计算方法相对简单, 且能准确地衡量机器人的静态稳定裕度, 因而在本文方法中选用绝对稳定裕度来衡量机器人的稳定性。
四足机器人重心在水平面上的投影到支撑多边形各边距离的最小值为机器人的绝对稳定裕度。图1为四足机器人支撑三角形内稳定裕度的分布。此时, 4号足处于摆动相, 其余三只足处于支撑相。当机器人重心的投影位于支撑三角形的内心时, 其到支撑三角形三边的距离相等, 此时, 机器人的稳定裕度最大。
 | 图1 支撑三角形内稳定裕度的分布Fig.1 Distribution of stability margin within support triangle |
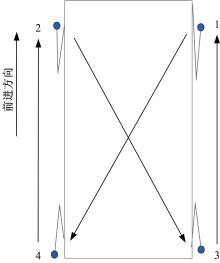
对于四足机器人而言, 共有6种非奇异的静步态迈步顺序[2], 在这6种迈步顺序中, 4-2-3-1为稳定裕度最优的迈步顺序[12], 其中, 机器人足的编号如图2所示。因而, 在本文中的静步态规划中, 采用4-2-3-1的迈步顺序。
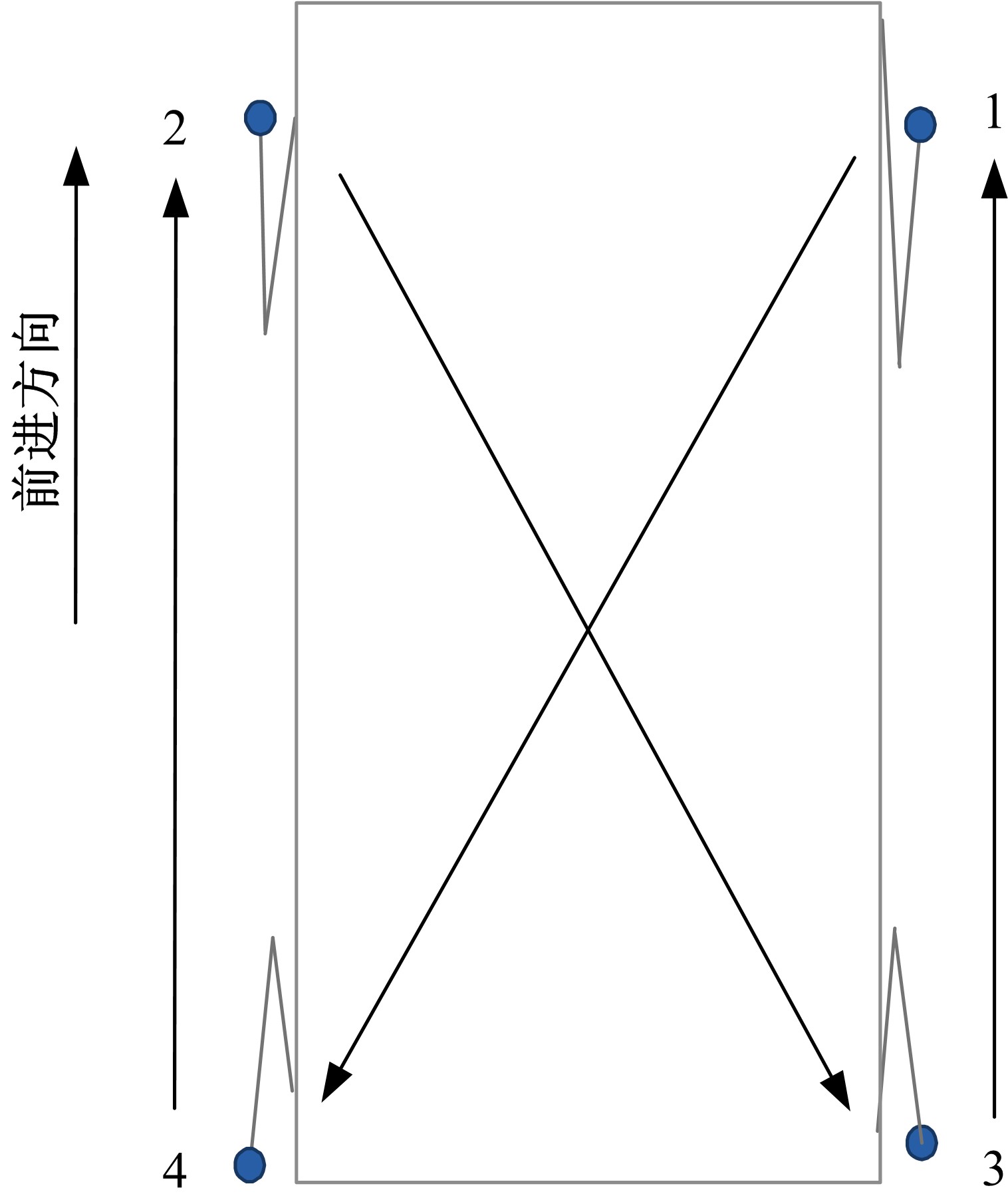 | 图2 四足机器人足的编号及迈步顺序Fig.2 Serial numbers of feet and step sequence of quadruped robot |
四足机器人在摆动不同的足时所对应的支撑三角形是不同的, 但是位于身体同侧的足所对应的支撑三角形存在重合的区域, 这个重合区域被称为双支撑三角形(Double support triangle)[7]。当机器人重心的投影位于这个区域时, 机器人就能够连续地按照迈步顺序依次摆动位于躯干同侧的足。
为提高机器人在使用静步态行走时的鲁棒性, 一般会设定一个最小稳定裕度Smin, 只有当机器人的稳定裕度不小于Smin时, 机器人才被认为是稳定的。但是, 由于Smin的存在, 使得位于躯干左右两侧足所对应的稳定区域是不连续的[5]。因此, 为保证机器人连续、稳定地按照迈步顺序向前行走, 本文规划的静步态中增加了四足支撑阶段。在四足支撑阶段中, 机器人通过四只足的支撑运动将其重心调整到对应的稳定区域。结合迈步顺序, 可以得到机器人使用静步态行走时的步态图, 如图3所示, 由图3可以看出在每只后足(3号足或4号足)摆动之前都有一个四足支撑阶段, 以保证机器人在迈步阶段的稳定性。
 | 图3 四足机器人静步态行走的步态图Fig.3 Gait diagram of quadruped robot walking with static gait |
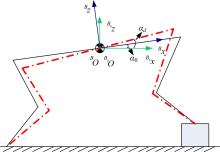
四足机器人在行走过程中, 由于地形的起伏而使四只足的落足位置高低不一, 依据前、后足落足点之间的高度差异主动地调整躯干的俯仰角(Pitching angle), 可以增大各足的有效工作空间, 进而可使机器人能够跨越更高的障碍物。姿态调整规划中最重要的是求得期望的俯仰角调整角度, 下面将详细描述这个角度的求解过程。
假设在四足支撑阶段, 机器人第 i只足在坐标系{B}中的坐标为BPi (Bxi , Byi , Bzi),i∈(1,2,3,4)。设定一个初始坐标系{B0},,如图4所示, 其原点与机体坐标系原点重合,
 | 图4 机器人俯仰角的计算Fig.4 Calculation of pitching angle of robot |
假设机器人在姿态调整之前的初始俯仰角为α0,即B0 x与B x的夹角为α0,如图4所示。由此可得坐标系{B0}与坐标系{B}之间的转换矩阵, 如式(1)所示:
进而, 可得机器人四只足在
式中:B0Pi (B0xi , B0yi , B0zi),i∈(1,2,3,4)表示i号足在{B0}中的坐标值。
然后, 分别计算前两只足(1号足和2号足)在B0x轴上坐标值的平均值x mf和在
计算后两只足(3号足和4号足)在B0x轴上坐标值的平均值xmr 和在B0z轴上坐标值的平均值zmr如式(4)所示:
最后, 得到期望的俯仰角调整角度为:
本文是以非连续静步态为基础进行规划的, 当机器人在足的摆动阶段, 其躯干静止不动, 这样能够避免出现机器人在迈步阶段因足底滑动而失去稳定性的情况[16]。机器人在四足支撑阶段完成重心的调整, 因而, 只需要对四足支撑阶段中的躯干运动轨迹进行规划。
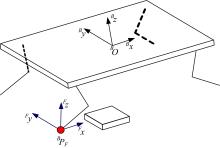
假设机器人躯干的质量均匀分布, 则机器人躯干的重心与躯干的几何中心重合, 躯干的摆动曲线即为躯干重心的摆动轨迹。在规划躯干调整轨迹时, 首先将机器的四只支撑足以及躯干的重心投影到水平地面上, 并设定一个平面坐标系 {P},如图5所示,然后通过四只支撑足投影在坐标系{P}中的坐标计算重心调整的目标位置并规划躯干运动轨迹。
 | 图5 机器人支撑足在水平地面上的投影Fig.5 Ground projection of support feet of robot |
为了保证机器人在足摆动过程中拥有较大的稳定裕度, 在四足支撑阶段将躯干重心在水平面上的投影调整至对应的双支撑三角形中稳定裕度最大的位置, 即以对应的双支撑三角形的内心为重心调整的目标位置。
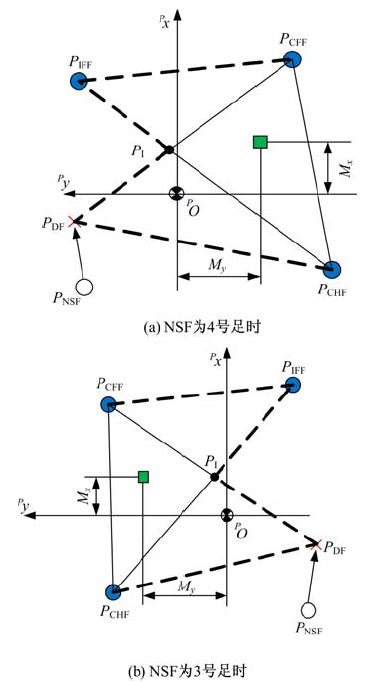 | 图6 重心调整目标的位置计算Fig.6 Calculation of target position of adjustment |
为了方便描述重心轨迹的规划过程, 将机器人在四足支撑阶段的足重新命名。如图6所示, 将按迈步顺序接下来要摆动的后足记为NSF(Next swing foot), 记此足的期望落足点为DF(Desired foothold), 与NSF位于躯干同侧的前足记为IFF(Ipsilateral front foot), 记与NSF位于躯干不同侧的两只足中的前足和后足分别为CFF(Contralateral front foot)和CHF(Contralateral hind foot)。假设这四只足的投影在
根据点PDF与点PCFF的坐标, 可得直线LDF-CFF的直线方程, 如式(6)所示:
根据点PIFF和点PCHF的坐标, 可得直线LIFF-CHF的直线方程, 如式(7)所示:
设直线LDF-CFF与直线LIFF-CHF的交点为 PI (xI,yI),则可得PI的坐标值为:
三角形
由相关点的坐标, 可得线段LI-CHF、线段LI-CFF、线段LCFF-CHF的长度分别为:
进而, 可得支撑三角形
坐标系
式中:Tadj为机器人完成重心调整所需要的时间;
通过在四足支撑阶段的重心调整, 四足机器人能够有效地增大其在运动过程中的静态稳定裕度。这样, 四足机器人就能够有效地避免因受到来自地形环境或自身意外扰动而使其处于失去稳定性的异常状态。同时, 也增强了四足机器人静步态规划算法的鲁棒性。
四足机器人摆动足的运动轨迹规划是机器人步态规划的基本组成部分。四足机器人的摆动足应该准确地摆动至期望的落足点, 并且在运动的过程中不与地形中的障碍物发生碰撞。
如果可以获取地形信息, 机器人能够根据对地形特征规划最优的摆动足摆动轨迹, 但是在本文中的四足机器人上没有任何机载的地形感知设备, 机器人无法获得所行走地形的地形信息。为此, 本文中规划了一种矩形摆动曲线, 能够保证机器人在无法获得地形信息的情况下顺利完成摆动足的摆动。当四足机器人的摆动足沿本文中提出的摆动足足底轨迹向前迈步时, 能够保证摆动足在向前运动的过程中始终与地面保持一定的距离。这样, 就能够避免出现因机器人的摆动足在运动的过程中与地形中的障碍物发生碰撞而导致机器人迈步失败甚至失去稳定性的异常状态。
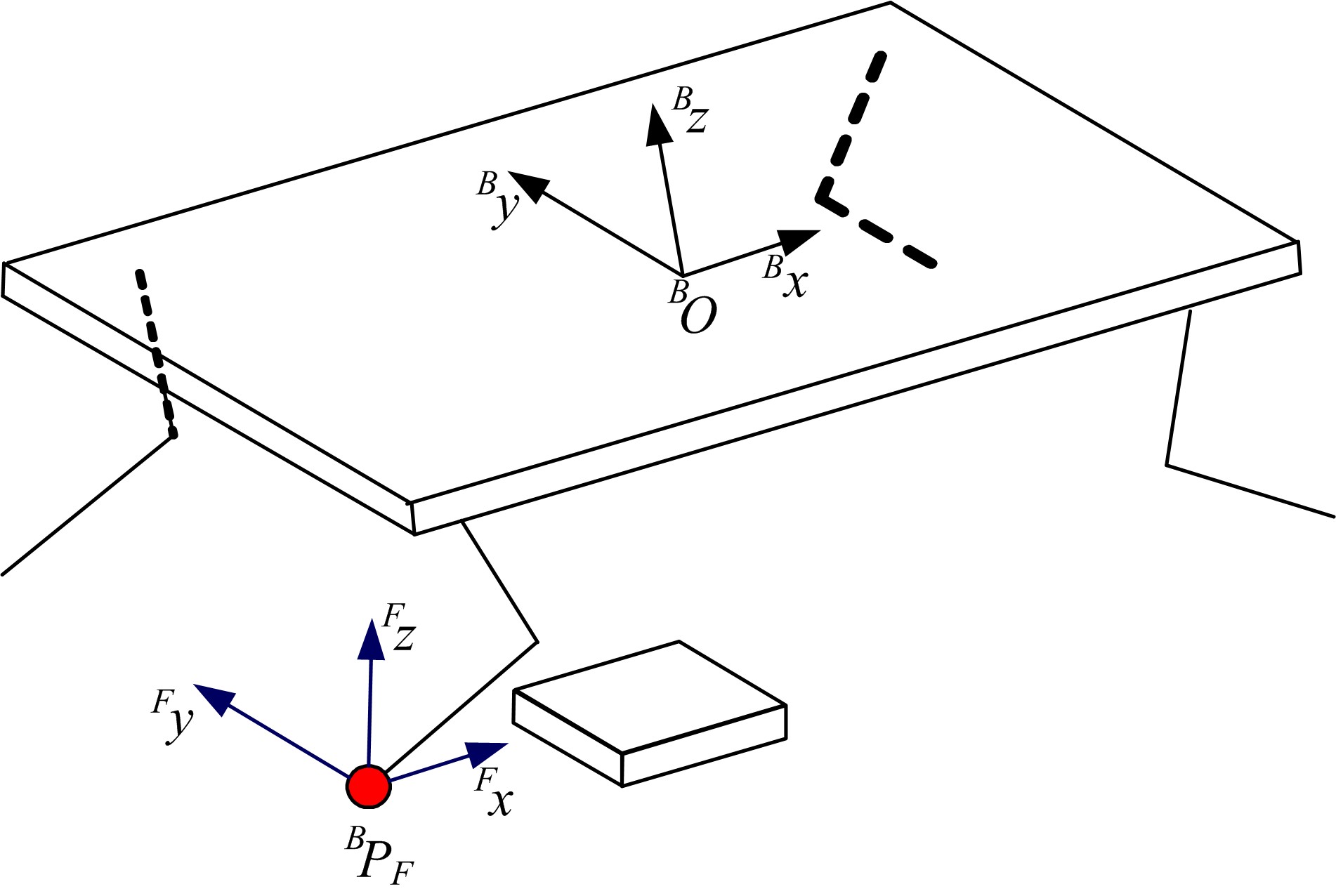 | 图7 足底坐标系{F}Fig.7 Foot coordinate frame {F} |
设定一个足底坐标系
2.3.1 摆动足相对于坐标系
如图8所示, 本文中提出的足底摆动轨迹分为三个阶段:垂直抬起阶段、前向摆动阶段和垂直下落阶段。假设机器人摆动足完成摆动的规划运动时间为Tsw。为避免因摆动足在垂直下落阶段运动速度过快造成落地时产生较大的接触力而影响机器人的稳定性, 机器人在前两个阶段(垂直抬起阶段和前向摆动阶段)用时为整个摆动足规划运动时间的一半, 即Tsw/2。剩余的Tsw/2的时间用以完成第三个阶段(垂直下落阶段), 这样可以有效地降低摆动足的下落速度, 进而减小摆动足接触地面时产生的冲击力, 消除影响机器人稳定的不利因素。
 | 图8 期望落足点低于起始点时的足底摆动轨迹Fig.8 Foot trajectory when target foothold of swing foot below start point of swing foot |
下面分别给出足底摆动轨迹三部分的方程:
(1)垂直抬起阶段
在垂直抬起阶段, 四足机器人的摆动足沿F z方向匀速上升一定的距离H,使摆动足在向前迈进的过程中与地面保持一定的距离,以保证摆动足在向前迈进的时不与地形中凸起的障碍物发生碰撞。在这一阶段中,机器人的足只沿F z
以保证摆动足在向前迈进的时候不与地形中凸起的障碍物发生碰撞。在这一阶段中
式中:
(2)前向摆动阶段
假设机器人摆动足的期望落足点与点F P沿F x和F y方向上的距离分别为Lx 和Ly。在前向摆动阶段中摆动足向前摆动至目标落足点沿Fz 方向的正上方, 由此可得到足底轨迹在这个阶段的方程为:
式中:
(3)垂直下落阶段
在垂直下落阶段, 机器人的摆动足只沿
式中:
由式(12)~式(14)可得机器人的摆动足曲线在坐标系
2.3.2 摆动足相对于坐标系
为了最终能够通过运动学的逆解得到机器人各关节的运动角度, 则需要求出足底运动轨迹在机体坐标系
假设机器人在摆动足向前摆动时的俯仰角为α,点BPF在机体坐标系中的坐标为((BxF ,ByF ,BZF),由此可得坐标系{F}与坐标系{B}之间的变换矩阵为:
根据
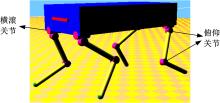
图9为机器人的仿真模型, 机器人每条腿具有三个自由度, 两个俯仰关节和一个横滚关节。
机器人躯干的长度为0.7 m, 宽为0.35 m, 自然站立时高度为0.55 m, 总质量为130 kg, 其中单腿质量为10 kg(躯干质量的11.1%)。在每只足的足底都安装有压力传感器, 用以感知机器人的触底信息; 在机器的躯干上安装有惯性测量单元用以检测机器人的姿态以及躯干的速度和加速度信息。
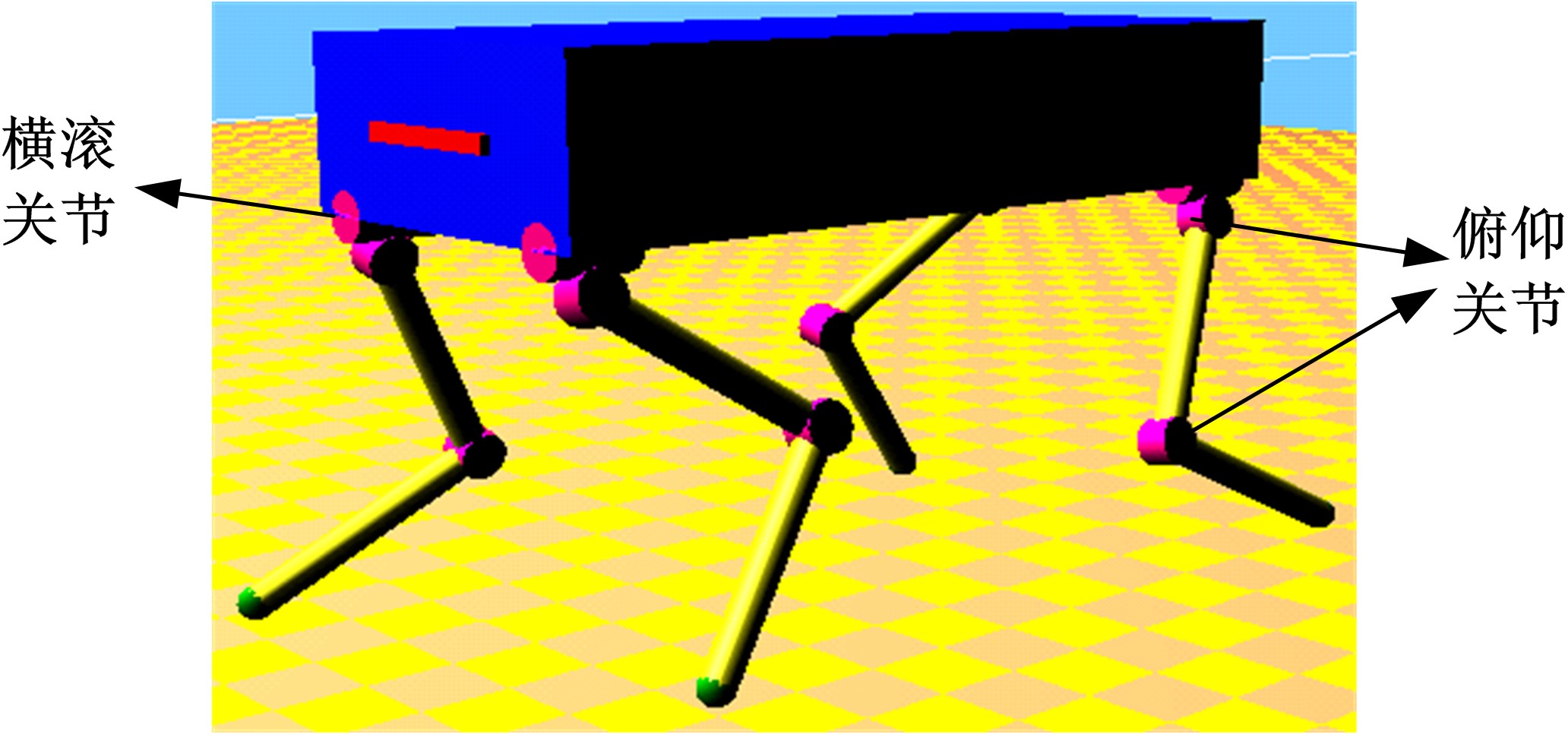 | 图9 四足机器人仿真模型Fig.9 Simulation model of quadruped robot |
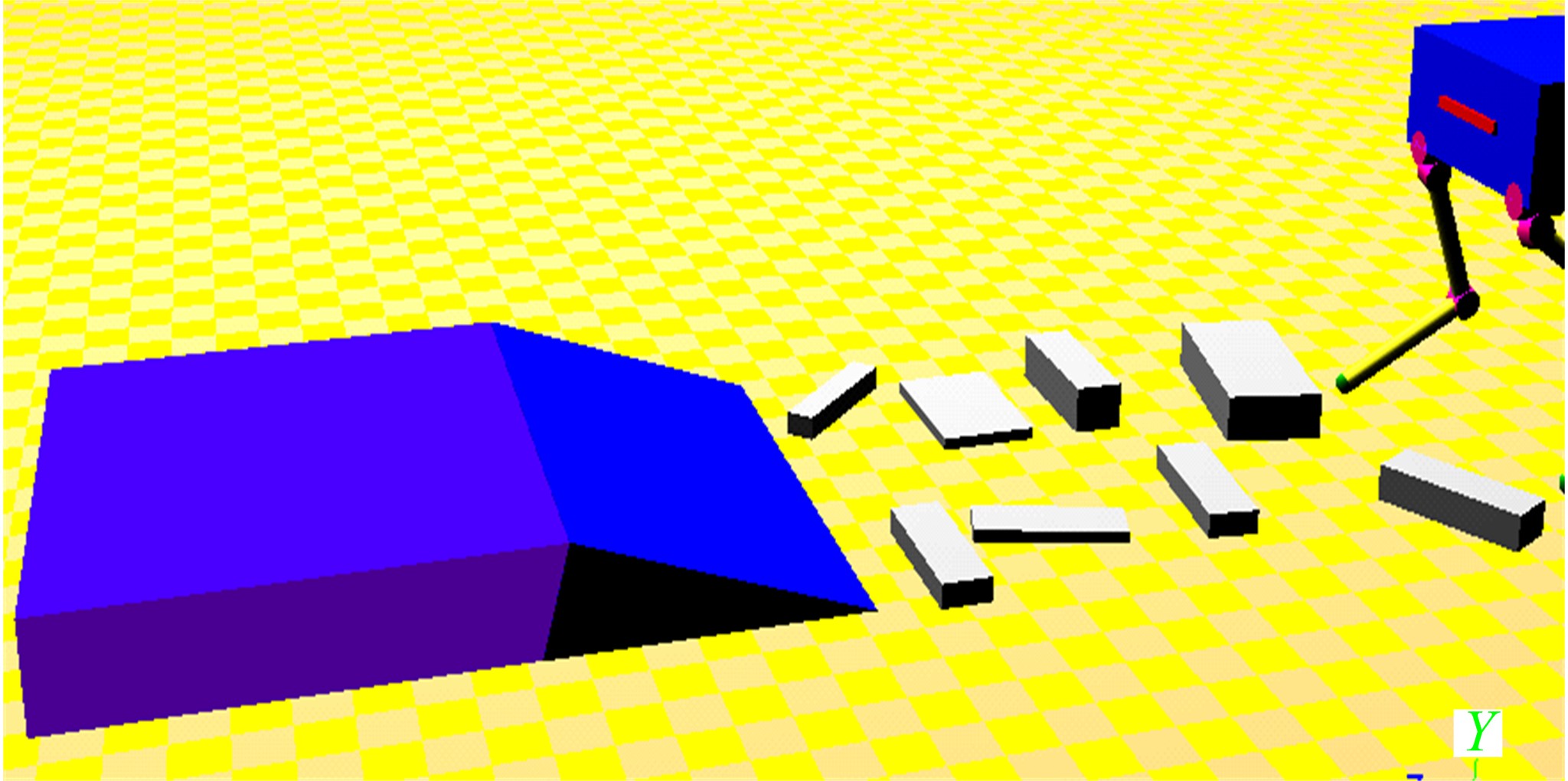
图10为在仿真环境中构建的崎岖地形, 地形包括三个部分:第一部分为大小不同、高度不一、随机散放的障碍物, 其中, 最高的障碍物高度为10 cm(机器人自然站立高度的18.2%), 最低高度为2 cm; 第二部分为斜度为17.2° 的斜坡; 第三部分为平坦的水平平台。
对四足机器人而言, 图10所示的复杂地形为未知、不确定的地形环境。机器人在行走的过程中根据本文方法实时规划相关运动, 以稳定、自主地通过该复杂地形。
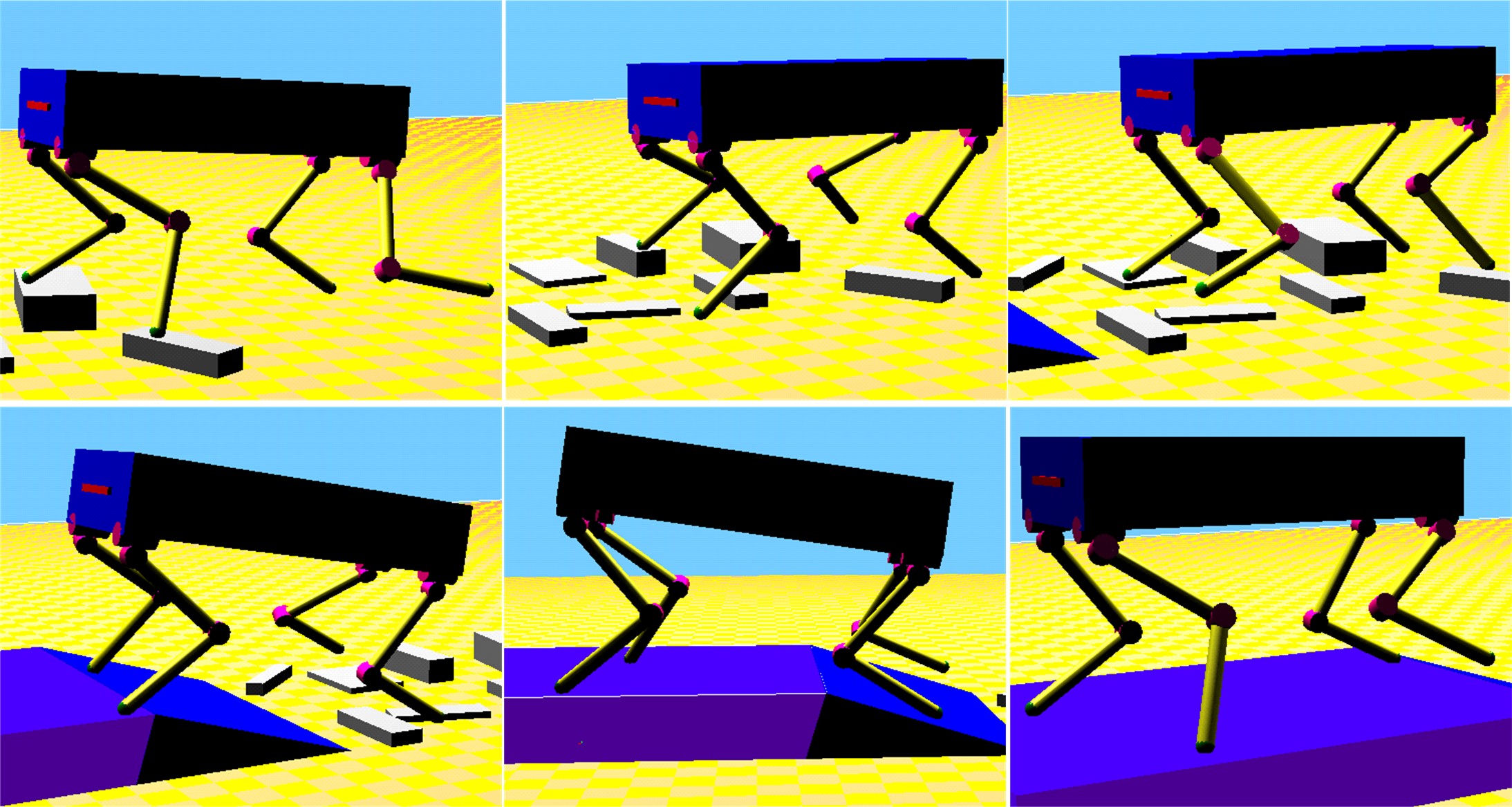
图11为仿真实验截图。机器人能够自主、稳定地通过这个复杂地形。
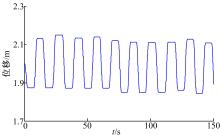
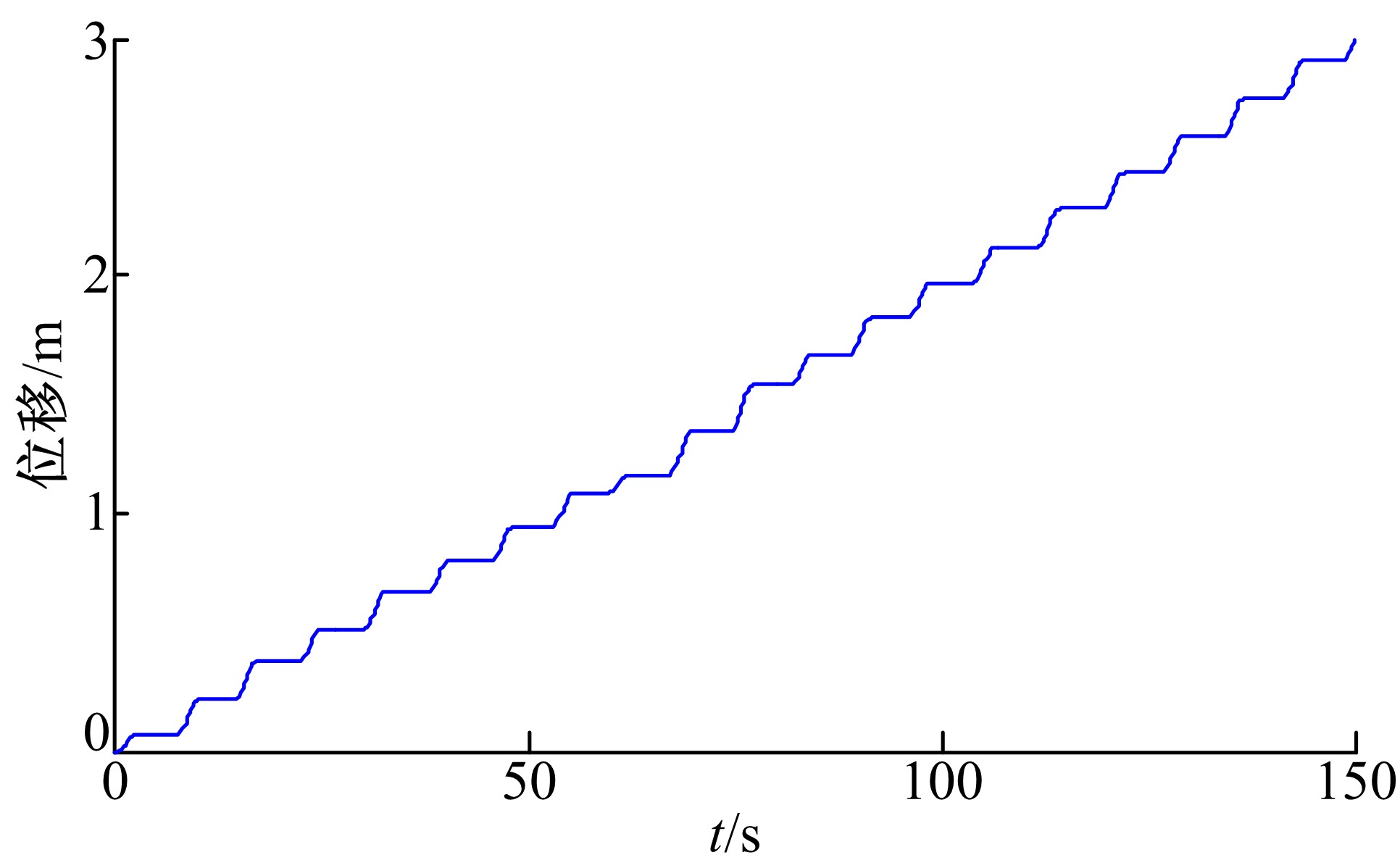
图12为四足机器人躯干的重心在前进方向上的移动轨迹, 由此看出, 机器人的移动轨迹连续且重心一直向前运动。在保证机器人稳定性的前提下, 消除了机器人躯干的后向运动, 能够有效地提高四足机器人在崎岖地形上行走过程中的平均运动速度和能量使用效率。
图13为四足机器人躯干的重心在侧方向上的移动轨迹。机器人能够在行走过程中根据本文算法自动计算重心调整量, 并根据自动规划的躯干摆动轨迹完成调整, 通过躯干在侧方向上的摆动, 增加机器人的稳定裕度。
 | 图13 机器人躯干在侧方向上的运动轨迹Fig.13 Position variation curve of robot’ s body in side direction with respect to moving direction |
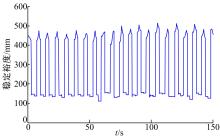
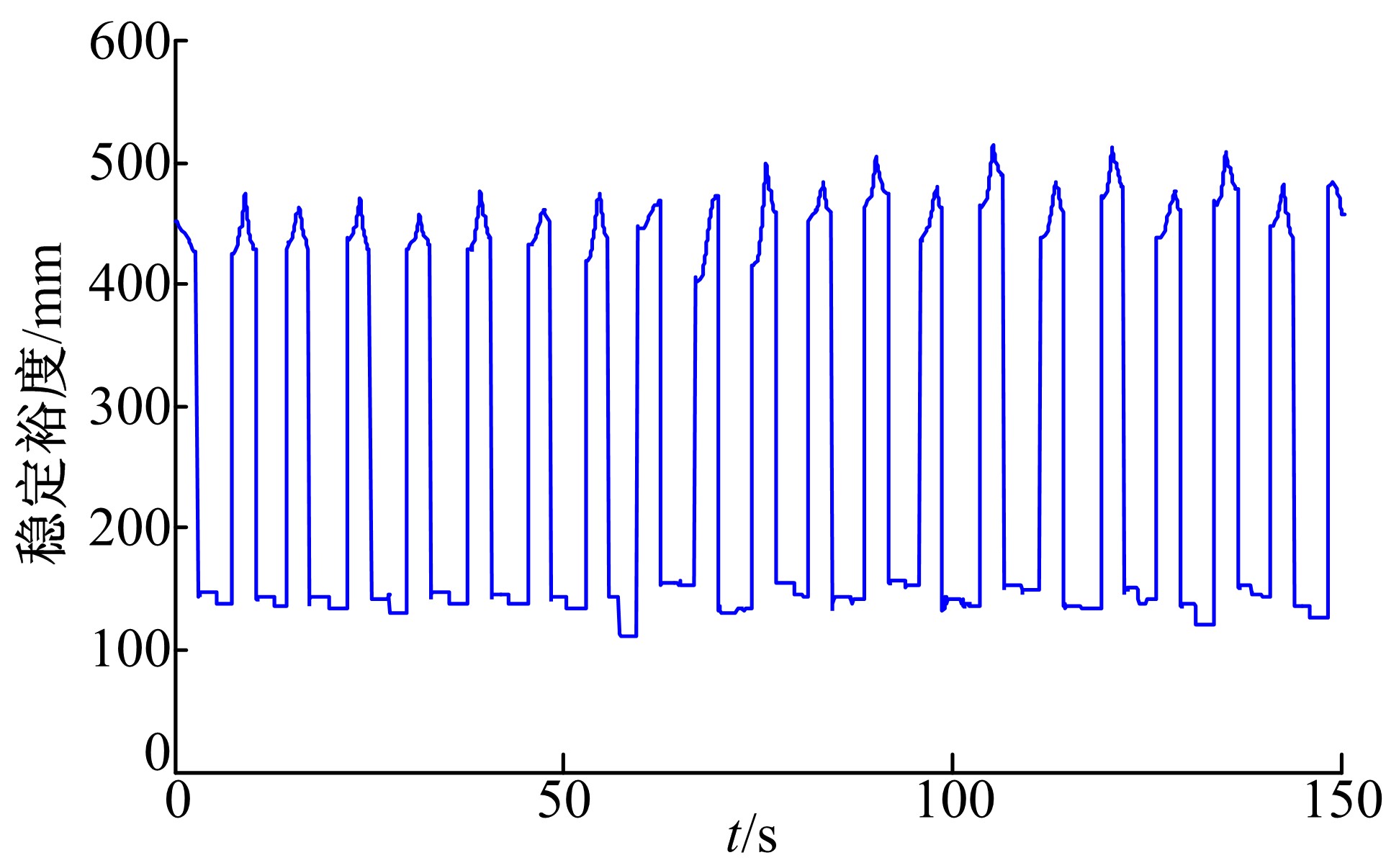
图14为机器人在整个行走过程中的稳定裕度。由图14可以看出, 机器人在整个行走过程中始终具有较大的稳定裕度, 有效地保证了机器人稳定地通过复杂地形。
图15为机器人躯干沿前进方向(x)和侧方向(y)上的速度和加速度变化曲线。其中, 速度和加速度为零的部分为四足机器人的迈步阶段。
由图15可以看出, 四足机器人在运动过程中, 其躯干运动的加速度和速度都是连续的。这样就可以避免四足机器人在行走过程中, 因自身运动的不连续而产生速度或者加速度的突变, 进而导致破坏机器人稳定性的情况发生。
 | 图15 机器人在行走过程中的速度和加速度变化Fig.15 Velocity and acceleration variation curve of robot's body during quadruped robot walking process |
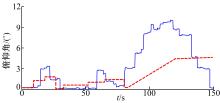
图16为机器人行走过程中俯仰角变化曲线, 其中虚线表示的是图10所示崎岖地形的地形起伏。当机器人行走时, 机器人能够根据地形的起伏, 自主调整躯干的俯仰角, 增加摆动足的有效工作空间, 能够使机器人跨越更高的障碍物, 从而有效地提高了机器人的环境适应性。
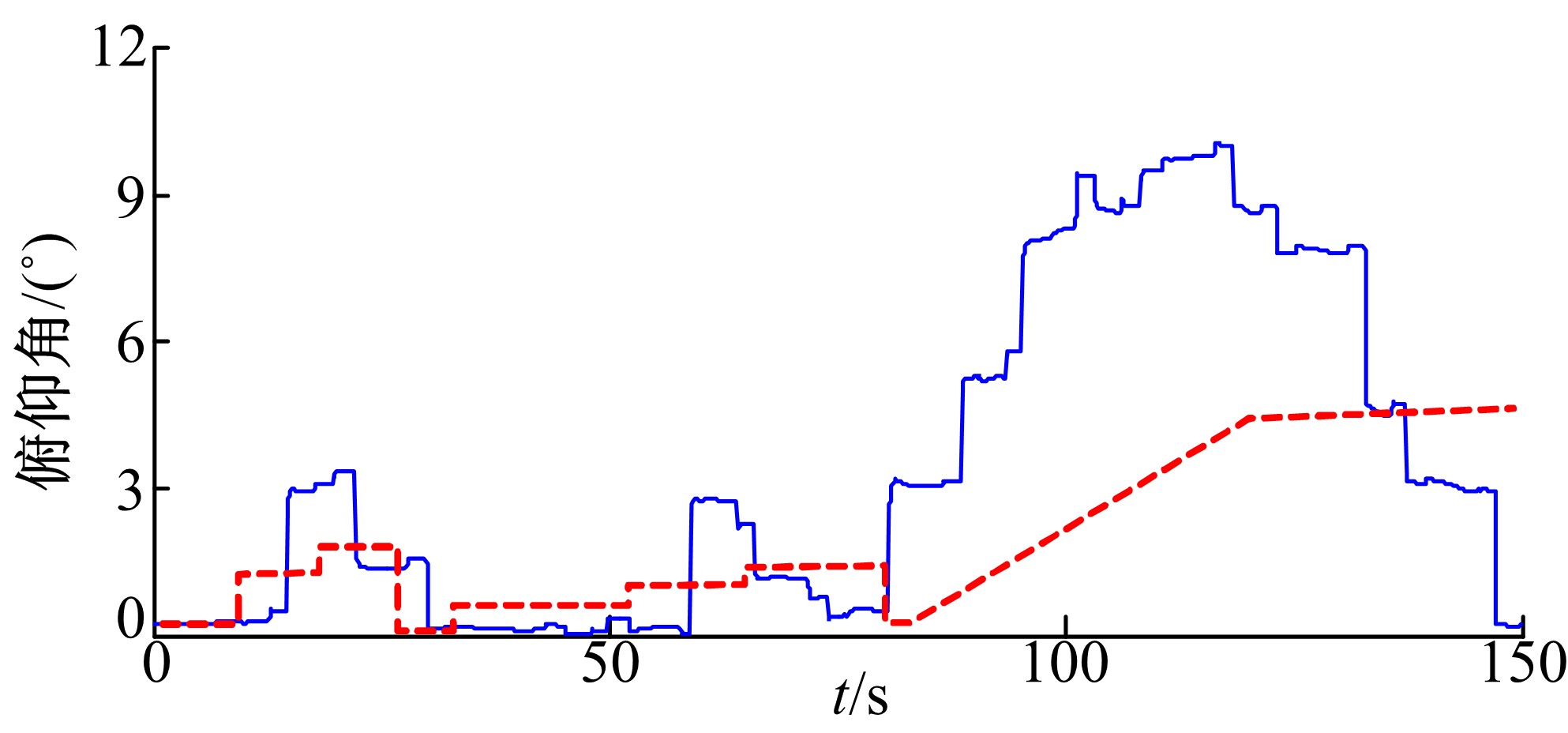 | 图16 四足机器人在行走过程中的俯仰角的变化Fig.16 Pitch angle variation curve of robot’ s body during quadruped robot walking process |
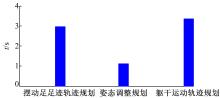
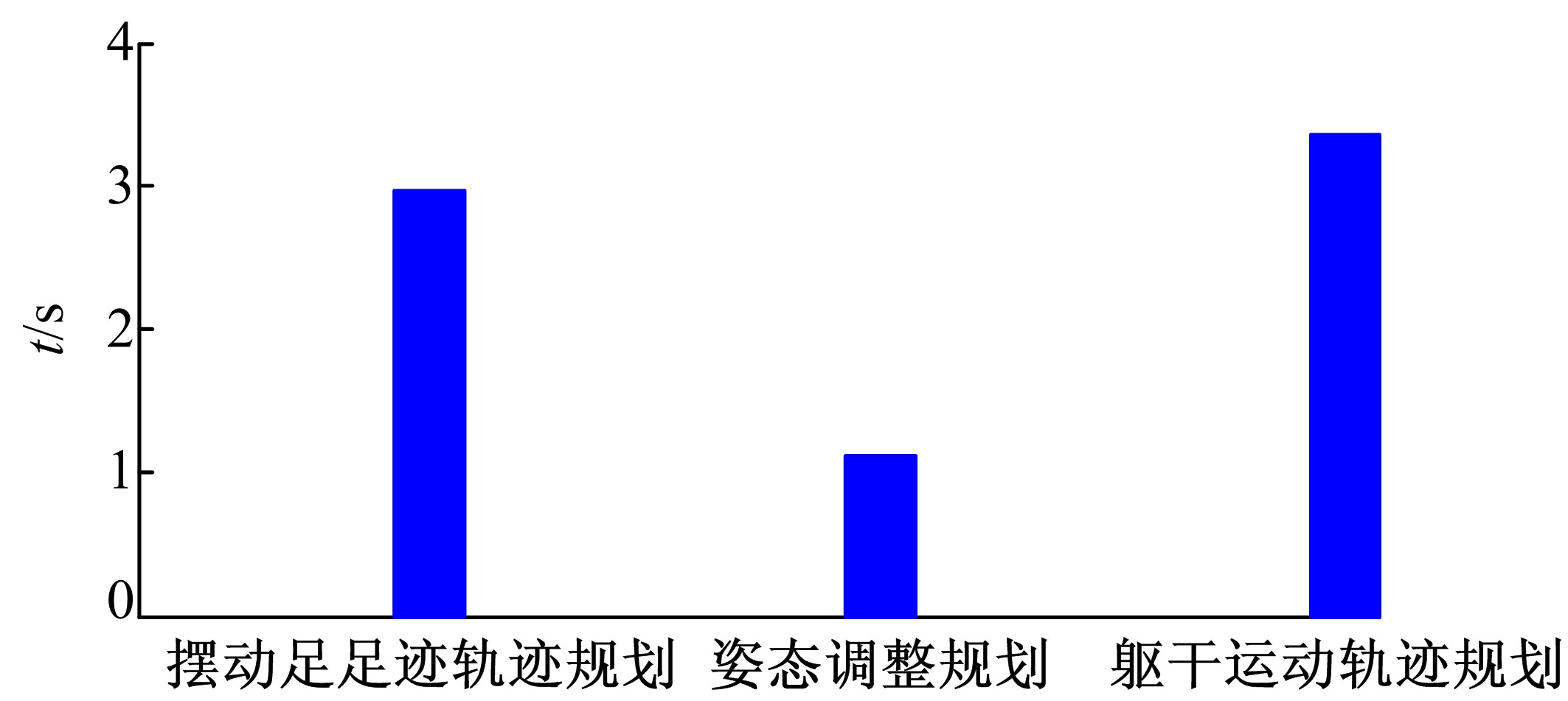
为验证算法的实时性, 将本文算法所包括的姿态调整规划、躯干运动轨迹规划以及摆动足足底轨迹规划, 在CPU型号为Intel Core I3的计算机上使用Matlab各运行一万次, 所用时间如图17所示。由图17可以看出, 本文提出的静步态规划中每部分运行一万次所用的时间均小于4 s, 即单个规划周期均小于0.4 ms。因而本文提出的四足机器人静步态规划方法能够保证四足机器人在崎岖地形上行走时实时地规划其自身运动。
本文通过对四足机器人静步态进行规划, 提高了四足机器人在复杂地形中的通过能力。使用五次曲线规划的重心摆动轨迹, 能够有效地保证机器人运动的连续性并且在整个前行过程中拥有足够的稳定裕度; 通过机器人姿态的调整, 机器人能够跨越更高的障碍物, 从而使机器人能够行走在更加崎岖的地形上。使用本文提出的摆动足足底轨迹规划方法, 机器人能够在无法获取地形信息的情况下, 顺利通过未知的复杂地形环境。仿真实验表明了本文静步态规划方法的有效性, 为提高机器人的环境适应性打下了较好的理论基础。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|