


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
臂式站起运动康复训练机械结构设计及分析
[刘坤1  , 叶明
, 叶明1 , 李超1 , 闫鹏飞1 , 刘晋侨2 ]
, 叶明|
|


作者简介:刘坤(1981-,男,副教授,博士.研究方向:下肢智能康复训练设备.E-mail:kunliu@jlu.edu.cn
通过建立人体运动生物力学模型研究了健康人体站起运动轨迹,设计了多自由度臂式下肢康复训练机械结构并对其进行了有限元分析与优化。通过实验研究了人体站起过程中各关节部位的角度变化,为下肢康复训练设备控制提供了参考。分析结果表明,对人体运动生物力学模型的研究和实验所得的数据能够对下肢智能康复训练方法提供有效参考,而本文所设计的机械结构符合使用环境下的力学性能要求,并且具有质量轻、占地少和成本低等优点,适于临床应用和产品化推广。
In this paper the Sit-to-stand (STS) trajectory of health persons is researched. First an STS biomechanics model is established. Then, the mechanical structure of a lower limb rehabilitation training robot with several degrees of freedom is designed and optimized. Finally, each joint angle in the STS process is assessed by experiment and is used to instruct the control of the designed lower limb rehabilitation training robot. Experiment results show that the STS biomechanics model can provide effective reference for the lower limb rehabilitation training. The designed mechanical structure conforms to the mechanical performance requirements with light weight, less space occupation, low cost. Therefore, it is suitable for clinical application and product promotion.
近年来, 中国社会的老龄化程度日益加剧[1, 2], 老龄人口数量也逐年增加, 其中因患有脑血管疾病和神经系统疾病而导致下肢运动功能障碍的患者数量相当庞大[3, 4]。与此同时, 因交通事故而引起下肢运动功能障碍的患者数量也在增长[5]。因此, 为有效锻炼和恢复患者下肢运动功能, 研发康复训练设备和训练系统, 对下肢运动障碍患者进行有效的康复训练并对其提供安全保护, 成为一个亟待解决的问题。
患者在使用传统下肢康复训练方法进行康复训练时, 需要理疗师进行大量辅助工作, 致使传统下肢康复训练方法效率低并无法统一训练规程, 容易造成患者的二次伤害。为了使患者接受更加科学、规范的治疗并将理疗师从繁重的工作当中解脱出来, 下肢康复训练机器人技术无疑成为很好的替代手段, 也因此成为目前生物医学工程领域的热点研究方向。目前, 国内外对下肢康复训练机器人的研究方向主要分为外骨骼式和减重提拉式[6, 7, 8, 9, 10]。在外骨骼式下肢康复训练机器人研究方面, 荷兰Twente大学所研发的一款外骨骼康复训练机器人LOPES[11], 可用穿戴设备将患者上身悬挂, 中部设有多自由度装置固定于腿部对其进行运动训练, 患者脚下是智能的跑步机。在外骨骼式康复训练机器人的使用过程中, 因为患者下肢完全是在外骨骼带动下执行被动运动, 患者会有不安全感, 而且其结构复杂、造价昂贵。在减重提拉式下肢康复训练机器人方面, 柏林慈善医院研发推出了一款多自由度提拉式的下肢减重康复训练机器人Haptic walker[12], 该康复训练机器人通过末端的传感系统可以对步态训练进行规划并提供多种训练模式, 但是该康复训练机器人占用空间大, 不适合医院或家庭使用, 限制了其产品化推广。纵览国内外对下肢康复机器人的研究, 基本都是针对步态的康复训练, 而没有针对患者站起阶段的康复训练。
本文基于人体站起运动的研究, 设计并优化了能够适应康复训练全过程的多自由度臂式机器人结构与控制系统。通过护理人员配合使用, 在下肢功能障碍患者卧床阶段, 可以对患者进行坐姿维持、翻身、转床等功能; 在站起训练阶段可以按照健康人体站起轨迹对患者进行站起康复训练。通过穿戴在人体上的可更换施力终端, 对患者提供安全保护。系统占用空间小, 便于产品化, 易于推广。
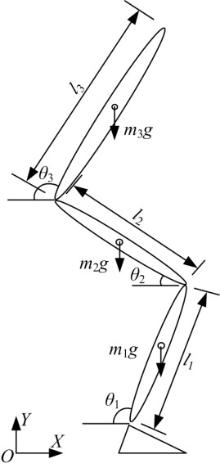
人体在站起过程中上肢、上躯干和头部的相对运动不大, 所以将其设为一个刚体。因此, 将整个站起过程的人体简化为矢状面内四肢段的人体生物力学模型, 如图1所示,
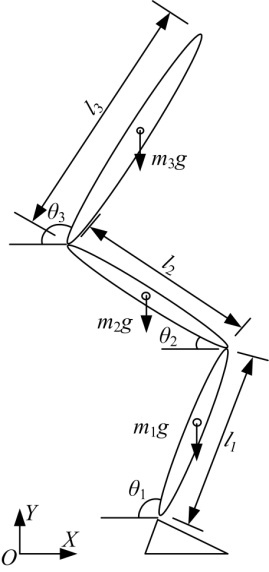 | 图1 四肢段人体生物力学模型Fig.1 Four-segment biomechanical model of human motion |
根据上述四肢段人体生物力学模型, 在站起过程中的某一时刻经静力学计算可得重心的位置, 将此过程推算到整个站起过程可得到整个站起过程中重心轨迹曲线, 表示为:
式中:
人体重心轨迹曲线是人体站起过程中其重心点在空间上的运动迹线, 不能表达出重心点在某时刻的运动情况。为了在站起过程中实现对下肢康复训练系统进行准确控制, 并对康复训练数据进行科学分析与评估, 重心点的速度是另一组反映患者站起过程中肌肉力康复状态的重要数据。在重心轨迹公式基础上可求得重心点在
本文设计了二自由度机械臂式减重型下肢康复训练系统的机械结构及其智能自适应控制系统。该机械结构既能满足下肢康复训练中不同工况下的力学性能要求, 又能配合智能控制系统使用, 使患者在不同康复阶段(卧床期、站起康复运动期、站姿步态训练期)可完成被动、助动、主动等状态下的多种康复训练模式。训练过程基于检测到的反馈信号, 实时控制两个伺服电动缸按照运算速度伸缩, 来改变机械臂的两个自由度下的曲展角度, 以实现控制人机交互终端(肩点位置)按照临床医学实验所得到的健康人体站起过程中肩点的运动曲线轨迹进行康复训练。在合理的机械结构和智能的控制系统配合下, 患者能够接受更加规范、高效、安全的康复训练。
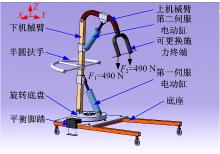
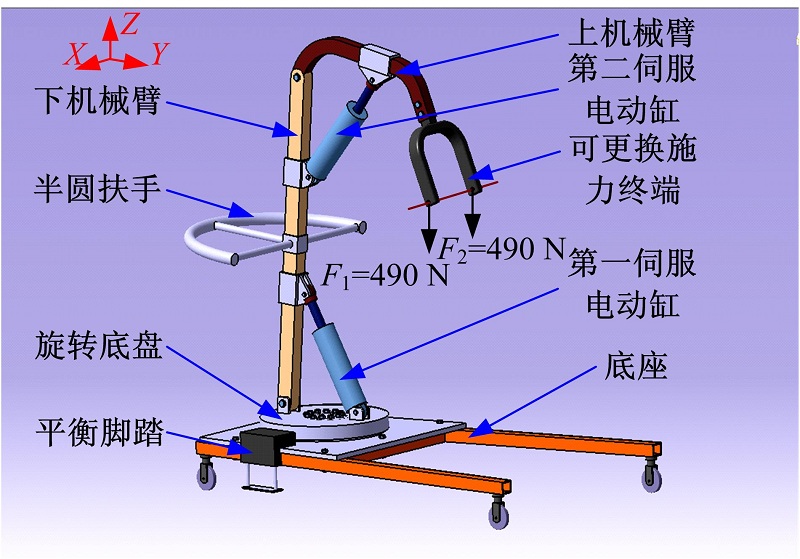
本文所设计的多自由度机械臂式减重型下肢康复训练系统的机械结构如图2所示。为了满足尽可能多的正常身高范围内的患者使用, 并且最大程度地降低训练系统机械结构所占空间, 以适合家庭化应用, 本机械结构设计将以身高范围为150~190 cm的患者为依据。为了保证整个系统在带动患者进行康复训练的动态过程中始终保持足够的稳定性, 并充分考虑电动伺服缸的伸缩行程与机械臂的转动情况, 以及患者训练的初始位置(坐姿状态)和终了位置(站姿状态), 将底座的两根四方管承载梁设计为梯形分布, 前管间距100 cm, 后管间距80 cm, 与底座连接的机械臂下臂长为150 cm, 上臂长为70 cm。为了给电动缸提供足够的行程空间并增大康复系统所适应的身高范围, 将上臂设计成弯曲形状。为了提高本机械系统的功能性, 以适应于不同的康复阶段, 与人体穿戴设备相连接的施力终端设计为可更换的3种机械结构, 如图2所示。其中, 图2(a)为伞式施力终端, 与背抱式人体穿戴设备相连, 配合平衡脚踏结构, 适用于患者在卧床康复阶段进行整体移动时使用; 图2(b)为U型提拉施力终端, 与背带式人体穿戴设备相连, 适用于站起与步态康复运动训练过程中提拉患者按照健康人体站起轨迹进行康复运动训练和保护步态运动训练时患者的安全; 图2(c)为S-U型上推式施力终端, 通过上肢力量配合, 用于上推式的减重康复训练。半圆扶手的结构设计使理疗师能够在各个方向的握点都能获得最大转矩进行施力, 从而在辅助患者进行康复训练过程中最大程度地节省体能。
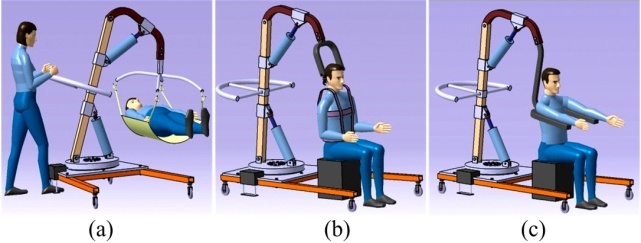 | 图2 多功能臂式减重型下肢康复训练系统效果示意图Fig.2 Multi function lower limb rehabilitation training system |
为了更好地分析所设计的机械结构在康复训练负载过程中的力学性能, 对其进行有限元学分析。机械结构负载过程中, 其加载点是与患者接触的施力终端末端。为了缩减有限元分析和优化计算的时间并保证较高的计算精度, 把所设计的机械结构简化为壳结构, 并把两个伺服电动缸简化为四方管壳结构, 用CATIA中外形曲面模块建立简化后的三维结构模型。底座方形管梁、下机械臂和上机械臂的横截面尺寸为长50 mm、宽50 mm、壳厚3 mm。将模型导入Hypermesh采用壳单元类型, 以10 mm边长的单元格进行网格划分, 在螺栓孔之间用rbe2单元进行刚性连接, 用Hypermesh中bolt(washer)功能在螺孔周围进行局部刚化模拟螺栓垫片效果, 在力学分析计算过程中机械结构所采用的材料属性如下:弹性模量为210 GPa; 材料密度为7850 kg/m3; 泊松比为0.3; 屈服强度为355 MPa。
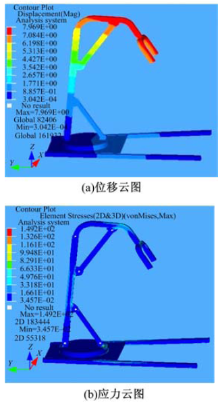
为保证机械结构能够满足康复训练过程中动态加载时的力学性能要求, 本文将对机械结构受到最大静态载荷进行力学分析。为了实现臂式下肢康复训练机器人的多功能性, 在前述内容中给出了3种可更换施力终端。这里主要针对适用于下肢功能障碍患者站起运动康复训练所适用的U型施力终端机械结构进行力学分析, 设计所适用最大载荷对象为体重100 kg、身高190 cm的患者。因为整体机械结构左右对称, 所以U型施力终端承载力F1=490 N、F2=490 N, 如图3所示。材料选择45#钢, 其屈服强度为355 MPa, 设安全系数为1.4, 则整个机械机构的许用应力为253.5 MPa。为保证患者在动态训练中的体感稳定性与舒适性, 设计要求机械结构最大形变位移不超过20 mm。在管壁厚度为3 mm的情况下, 通过受力分析得到机械机构的位移云图如图4(a)所示, 应变云图如图4(b)所示。从图4可知, 最大变形发生在施力终端末端, 即加载载荷处, 且最大变形值为7.97 mm, 最大应力发生在第二伺服电动缸与下机械臂的铰接位置, 值为149.2 MPa, 机械结构总质量为40.6 kg。由于壁厚为3 mm时的最大变形和最大应力都远小于设计要求的最大形变位移和许用应力, 会造成材料浪费, 因此应在满足设计要求的最大形变位移和许用应力下对壁厚进行优化。
 | 图3 机械系统装配图与载荷分析示意图Fig.3 Assembly drawing and loading analysis of the mechanical structure |
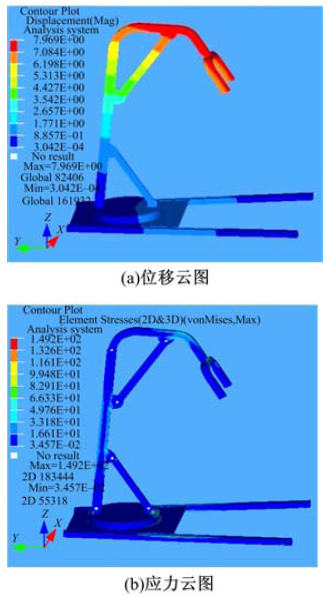 | 图4 机械结构有限元分析Fig.4 Finite element analysis of the mechanical structure |
优化过程数学条件如下:
式中:
优化计算迭代三次达到最优值, 壁厚减少2.1 mm, 总质量减少到31.3 kg, 总质量减少18.9%。两次静力学受力分析数据对比分析结果如表1所示。
| 表1 机械结构力学分析结果 Table 1 Mechanics analysis result of the mechanical structure |
人体站起过程中人机交互终端(肩点位置)的运动轨迹是关于时间的曲线, 由于康复训练个体和训练阶段的要求不同, 机械臂输出终端运动轨迹曲线需要根据实际需要进行调节, 由图1中四肢段人体生物力学模型可以计算出人体站起过程肩点运动轨迹方程如下:
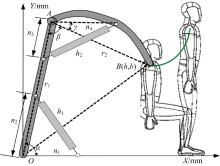
因此, 为实现对不同身高患者站起轨迹的控制, 可以在实验前测量好各肢段长度后, 由式(4)计算出所对应人机交互终端的控制轨迹, 通过实时控制伺服电动缸实现对机械结构的控制。本文所设计的康复训练系统采用两个伺服电动缸作为动力装置, 为实现对电动缸的速度控制, 应将人机交互终端的轨迹转化为伺服电动缸的速度。运用动力学逆问题[13], 以第二种U型可更换施力终端为例, 如图5所示, 所设计的上下机械臂的固有尺寸为
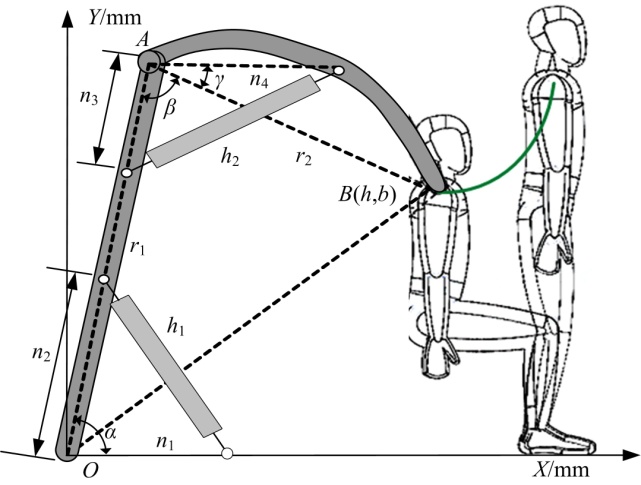 | 图5 机械结构运动分析与人体站起轨迹 控制分析示意图Fig.5 Movement analysis of the mechanical structure and control of the STS trajectory |
为了研究健康人体站起过程中的踝关节、膝关节和髋关节的相对运动情况, 本文对下肢无病史的5位男性和5位女性测试者(身高为170± 10 cm、年龄23± 5岁)每位进行了3次不同速度的站起实验:自然站起、低于自然站起速度的站起和高于自然站起速度的站起。如图6所示, 实验前在实验者的踝关节点、膝关节点、髋关节点和肩部点贴上全发射标记点, 使用三维光学运动捕捉成像分析系统对标记点进行数据采集和分析, 得到各关节的运动学参数。据文献[14]运动数据统计, 男性和女性自然站起过程的平均时间为(1.907± 0.057) s。实验将站起过程划分为20等分, 在30组数据中各取21个点加权平均后得到各关节部位相对转动角度, 如表2所示。
 | 图6 健康人体站起运动分析实验Fig.6 STS experiment of a healthy person |
| 表2 人体在站起过程中各关节部位相对转动角度 Table 2 Angles of each joint in the STS process |
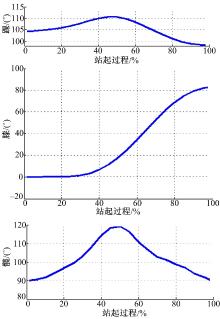
根据表2的数据用Matlab中的Curve Fitting Tool工具对踝部关节、膝部关节和髋部关节的角度相对于时间的21组数据点进行函数拟合, 拟合结果如图7所示。图7中的3幅图分别为踝部关节角度、膝部关节角度和髋部关节角度变化曲线图。由图7可见, 在站起周期的前25%左右膝部关节角基本没有变化, 而踝部关节角仅增大约2° , 这是因为在此期间臀部未离开凳面, 躯干前倾过程带动大腿骨向前滑移使膝部轻微前移, 而脚掌触地位置未变的情况下致使小腿略向前倾, 导致踝部关节角度有所增大。此时髋部关节角逐步增大, 是因为躯干前倾以保证重心前移至脚部上方后, 靠下肢肌肉力能使人体平稳站起, 之后臀部离开凳面。在站起周期25%左右之后各关节部位角度逐步增大, 到站起周期的50%左右时踝部关节角和髋部关节角增至最大, 而此时的膝部关节角增大速率达到最大值。在站起周期的后半程, 踝部关节角和髋部关节开始减小, 此时的膝部关节角还在持续的增大, 在站起过程结束时3个关节角度都在90° 左右, 是人体达到直立状态。实验结果表明, 整个站起过程3个角度的变化趋势符合健康人体站起规律。
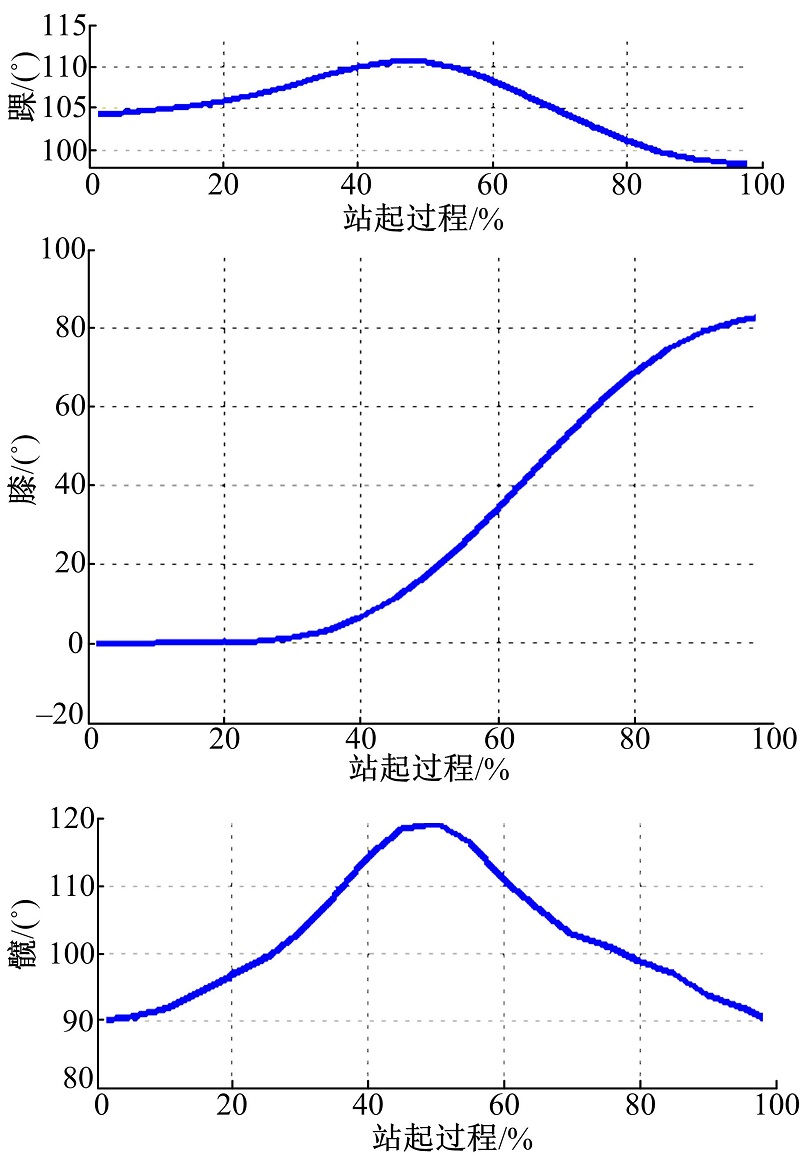 | 图7 踝、膝、髋部关节角度变化曲线Fig.7 Angles of the ankle, knee and hip |
根据表2的实验结果和重心轨迹计算公式(1), 可计算出站起过程中人体质心运动数据, 同样用Matlab进行拟合得到图8。由图可以明显看出, 质心在竖直方向经历了先下降后上升的过程。这是因为在站起初期人体只是处于躯干前倾, 而身体下肢部位基本未发生位置变化, 所以质心首先先前向下移动, 之后, 人体脱离凳面, 竖直站起,
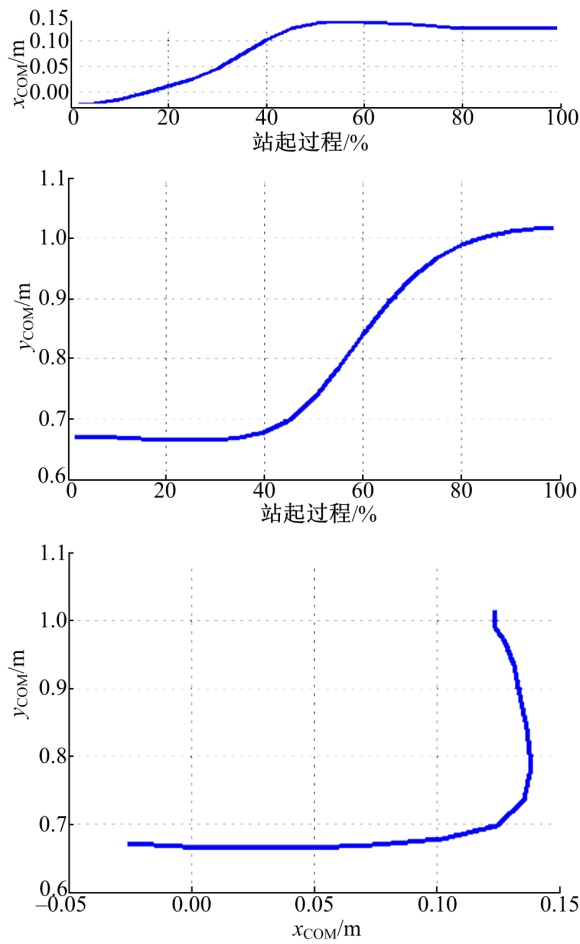 | 图8 站起过程人体质心轨迹运动曲线图Fig.8 Trajectory of the centre of mass in the STS process |
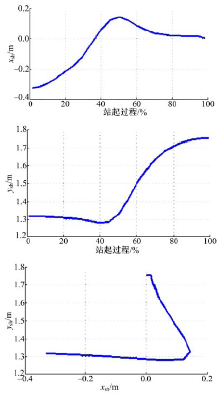
本文所设计的康复训练系统机械结构若要实现康复训练效果, 就要基于健康人体站起轨迹对患者进行站起训练, 而机械结构输出终端与患者肩点相连, 因此控制其终端输出曲线应基于健康站起轨迹核算后的人体肩点运动轨迹, 由式(3)可得到肩点位移数据如图9所示, 3幅图分别为肩点在水平和竖直方向位移变化曲线和肩点在矢状面内轨迹变化曲线。曲线变化走势和重心轨迹曲线的变化走势基本一致, 并且曲线的转折点的变化原因也一致, 但是肩点在水平方向最大位移变化约为0.47 m, 在竖直方向上最大位移变化约为0.48 m, 与重心点的位移变化间的差异较大, 这是因为重心点轨迹仅是反映各肢段位置变化的几何关系, 与肢段质量无关。
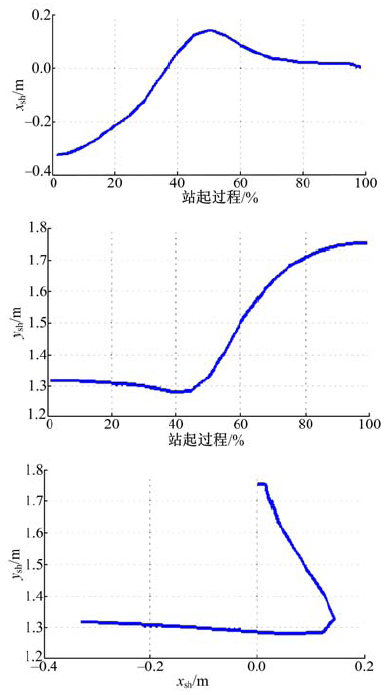 | 图9 站起过程肩点轨迹曲线Fig.9 Trajectory of the shoulder in the STS process |
为实现下肢康复运动训练智能化、高效率化、规范化、科学化, 并减轻物理治疗师的繁重工作, 本文基于人体站起运动开发了对下肢康复运动训练全阶段适用的多自由度臂式下肢康复运动训练机器人系统。通过对人体站起过程建立生物力学模型研究人体站起运动, 对各关节角度的变化情况和站起重心轨迹进行了研究, 为多自由度臂式机器人的结构设计和控制研究奠定了理论基础。所设计的多自由臂式机械结构设计具有可更换式的实力终端, 能够适应下肢康复运动训练的全阶段, 而且站起训练过程可使患者按照正常健康人体站起轨迹进行康复训练, 使训练更加科学化。设备能把机械运动结构与健康人体运动相匹配, 符合人体运动学, 运动规划方面具有可行性。整个机器人采用可拆装式设计, 便于运输和产品化推广。
The authors have declared that no competing interests exist.
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|