Journal of Jilin University(Engineering and Technology Edition) ›› 2024, Vol. 54 ›› Issue (5): 1246-1257.doi: 10.13229/j.cnki.jdxbgxb.20221519
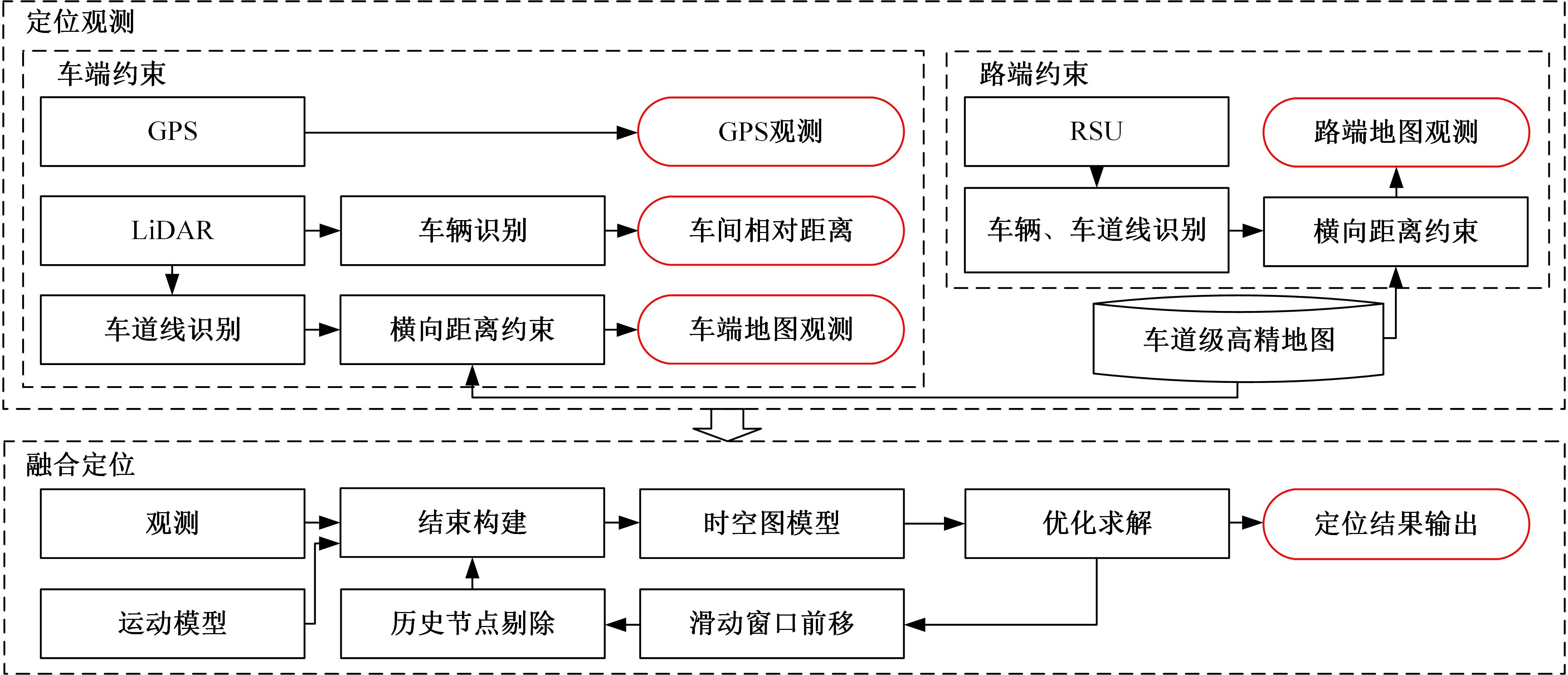
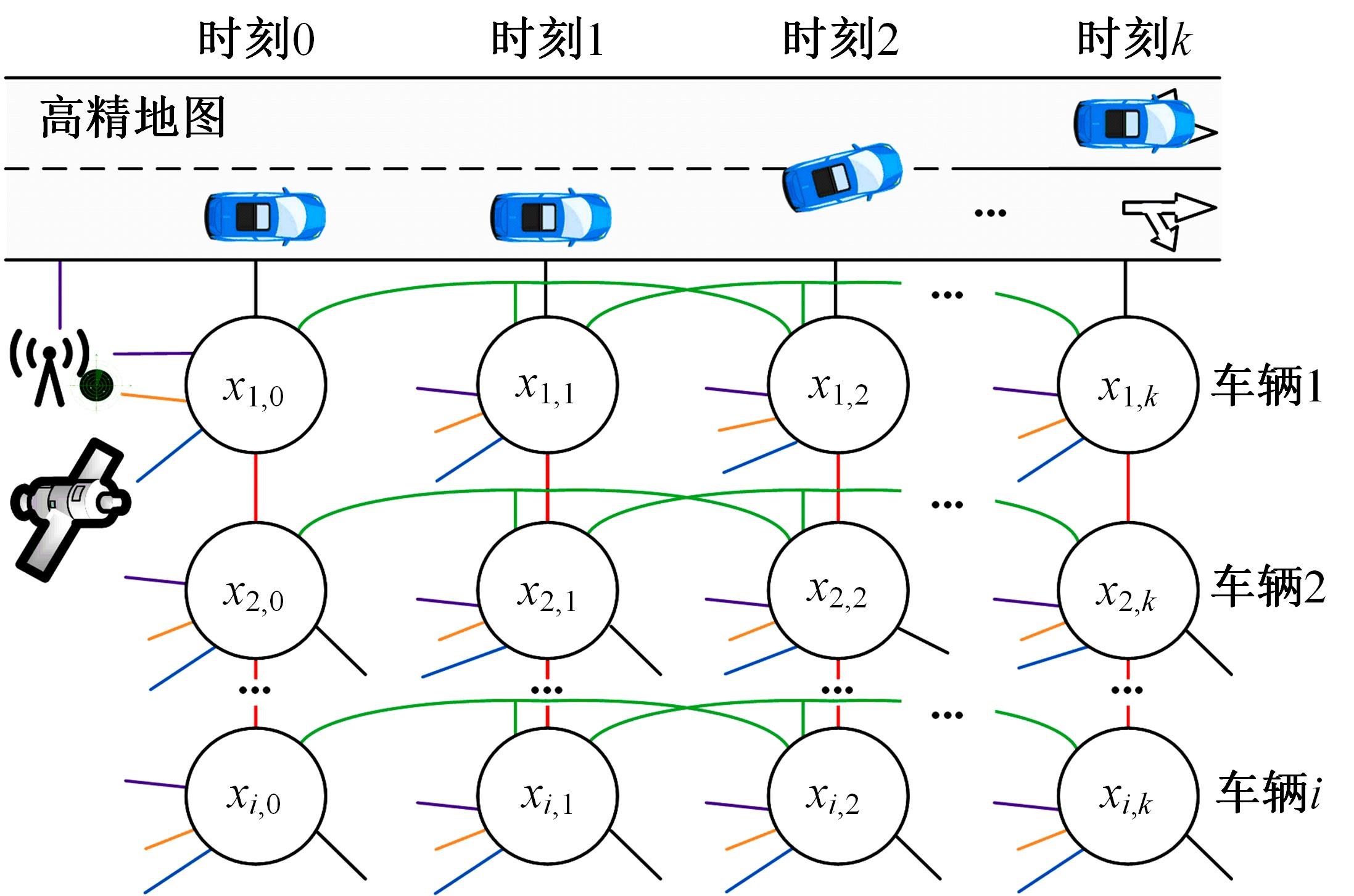
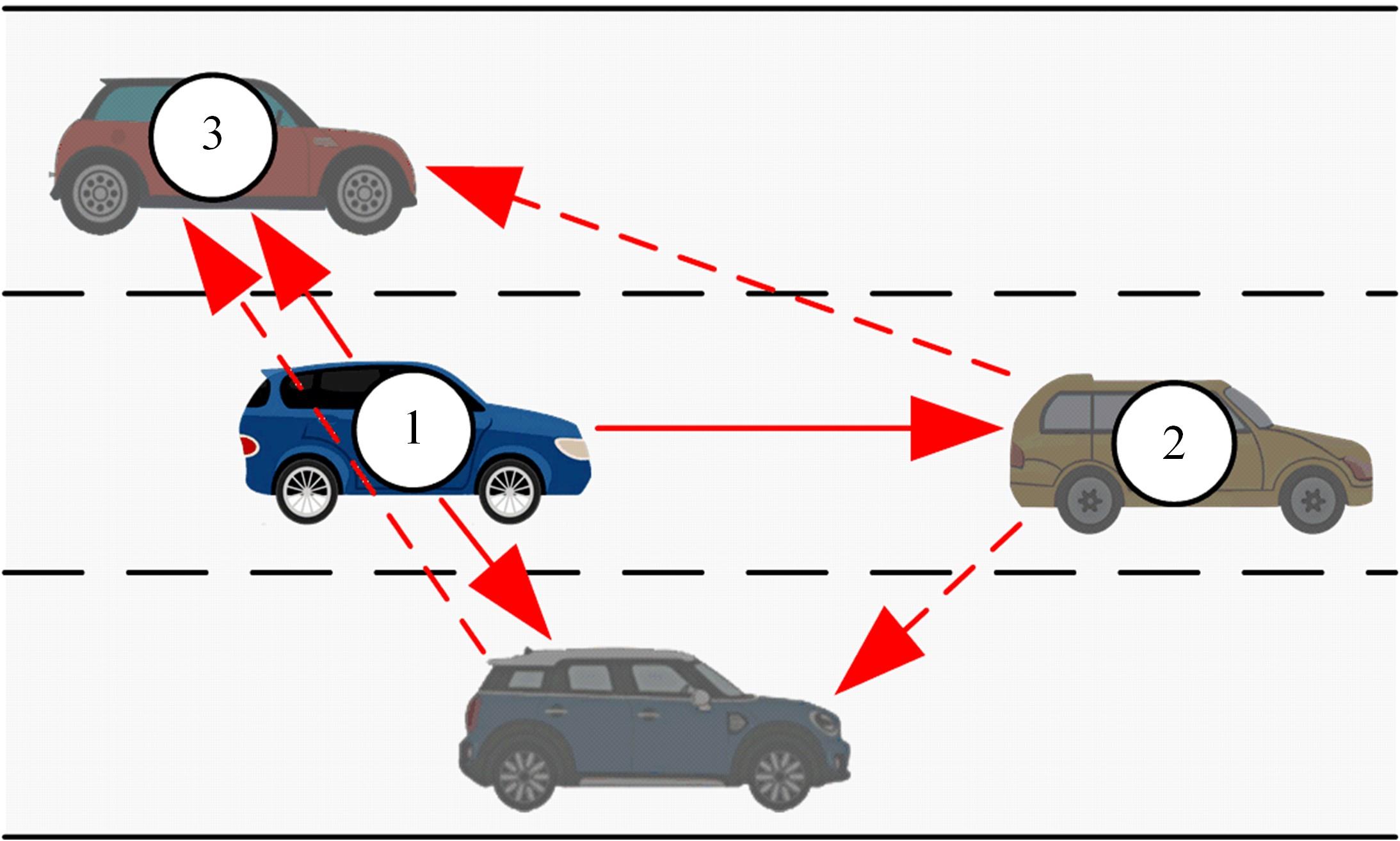
Vehicle-infrastructure-map cooperative localization method based on spatial-temporal graph model
Zhao-zheng HU1,2( ),Xun-pei SUN1,Jia-nan ZHANG1,Ge HUANG1,Yu-ting LIU1
),Xun-pei SUN1,Jia-nan ZHANG1,Ge HUANG1,Yu-ting LIU1
- 1.Intelligent Transportation Systems Research Center,Wuhan University of Technology,Wuhan 430063,China
2.Chongqing Research Institute,Wuhan University of Technology,Chongqing 401120,China
CLC Number:
- U495





| 1 | 李寿涛, 李嘉霖, 孟庆瑜, 等. 基于点云直方图的回环检测算法和车辆定位方法[J]. 吉林大学学报:工学版, 2023, 53(8): 2395-2403. |
| Li Shou-tao, Li Jia-lin, Meng Qing-yu, et al. Loop-closure detection algorithm based on point cloud histogram and vehicle positioning method[J]. Journal of Jilin University (Engineering and Technology Edition), 2023, 53(8): 2395-2403. | |
| 2 | Schwarzbach P, Michler A, Tauscher P, et al. An empirical study on V2X enhanced low-cost GNSS cooperative positioning in urban environments[J]. Sensors, 2019, 19(23): 5201. |
| 3 | Zhou Z, Hu Z Z, Li N, et al. Road-pulse: pavement vibration features from accelerator to enhance intelligent vehicle localization[C]∥2021 IEEE Intelligent Vehicles Symposium(IV), Nagoya, Japan, 2021: 940-946. |
| 4 | 吴文静, 陈润超, 贾洪飞, 等. 车路协同环境下路段掉头区域车辆协同控制[J]. 吉林大学学报: 工学版, 2019, 49(4): 1100-1106. |
| Wu Wen-jing, Chen Run-chao, Jia Hong-fei, et al. Collaborative control method of vehicles in U-turn zone under environment of cooperative vehicle infrastructure system[J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(4): 1100-1106. | |
| 5 | 田彬, 赵祥模, 徐志刚, 等.车路协同条件下智能网联高速公路通行效率信息自适应分发协议: NRT-V2X[J]. 中国公路学报, 2019, 32(6): 293-307. |
| Tian Bin, Zhao Xiang-mo, Xu Zhi-gang, et al. NRT-V2X: adaptive data dissemination protocol for traffic efficiency of connected and automated highways[J]. China Journal of Highway and Transport, 2019, 32(6): 293-307. | |
| 6 | 王栋民, 赵冬青, 向民志, 等. 车载分散式协同定位算法性能分析[J]. 测绘科学技术学报, 2021, 38(2): 130-135. |
| Wang Dong-min, Zhao Dong-qing, Xiang Min-zhi, et al. Performance analysis of vehicle distributed cooperative location algorithm[J]. Journal of Geomatics Science and Technology, 2021, 38 (2): 130-135. | |
| 7 | Li Y C, Hu Z Z, Cai Y F, et al. Visual map-based localization for intelligent vehicles from multi-view site matching[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(2): 1068-1079. |
| 8 | 孙宁, 闫梦如, 倪捷, 等. 基于GRI的多车协同定位研究[J]. 汽车工程, 2018, 40(4): 488-493, 499. |
| Sun Ning, Yan Meng-ru, Ni Jie, et al. A study on multi-vehicle cooperative positioning based on GRI[J]. Automotive Engineering, 2018, 40(4): 488-493, 499. | |
| 9 | 段续庭, 田大新, 王云鹏. 基于V2X通信网络的车辆协同定位增强方法[J]. 汽车工程, 2018, 40(8): 947-951, 959. |
| Duan Xu-ting, Tian Da-xin, Wang Yun-peng. Vehicle cooperative positioning enhancement method based on V2X communication networks[J]. Automotive Engineering, 2018, 40(8): 947-951, 959. | |
| 10 | Ammous M, Valaee S. Cooperative positioning in vehicular networks using angle of arrival estimation through mmWave[C]∥2020 IEEE Global Communications Conference(GLOBECOM), Taipei, China, 2020: 1-6. |
| 11 | Ma Z, Sun S L. Research on vehicle-road co-location method oriented to network slicing service and traffic video[J]. Sustainability, 2021, 13(10): 5334-5348. |
| 12 | 王玖玲, 吴韶波, 张媛利, 等.利用V2X增强GPS的协同车辆定位方法[J]. 系统仿真学报, 2019, 31(12): 2901-2906. |
| Wang Jiu-ling, Wu Shao-bo, Zhang Yuan-li, et al. Cooperative vehicle positioning method based on V2X enhanced GPS[J]. Journal of System Simulation, 2019, 31(12): 2901-2906. | |
| 13 | Gulati D, Zhang F H, Clarke D, et al. Graph based cooperative localization using symmetric measurement equations and dedicated short range communication[C]∥2017 IEEE International Conference on Multisensor Fusion and Integration for Intelligent Systems(MFI),Daegu, Korea(South), 2017: 644-649. |
| 14 | Wang F A, Xu L W, Zhuang W C, et al. Geometry-based cooperative localization for connected vehicle subject to temporary loss of GNSS signals[J]. IEEE Sensors Journal, 2021, 21(20): 23527-23536. |
| 15 | 罗文慧, 董宝田, 王泽胜. 基于车路协同的车辆定位算法研究[J]. 西南交通大学学报, 2018, 53(5): 1072-1077, 1086. |
| Luo Wen-hui, Dong Bao-tian, Wang Ze-sheng. Algorithm based on cooperative vehicle infrastructure systems[J]. Journal of Southwest Jiaotong University, 2018, 53(5): 1072-1077, 1086. | |
| 16 | Zhang G H, Ng H F, Wen W S, et al. 3D mapping database aided GNSS based collaborative positioning using factor graph optimization[J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 22(10): 6175-6187. |
| 17 | 张攀, 刘经南. 通用化高精地图数据模型[J]. 测绘学报, 2021, 50(11): 1432-1446. |
| Zhang Pan, Liu Jing-nan. A generalized data model of high definition maps [J]. Journal of Surveying and Mapping, 2021, 50(11): 1432-1446. | |
| 18 | Milioto A, Vizzo I, Behley J, et al. Rangenet++: fast and accurate lidar semantic segmentation[C]∥2019 IEEE/RSJ International Conference on Intelligent Robots and Systems(IROS), Macau, China, 2019: 4213-4220. |
| [1] | Wen-yong LI,Cong-ruo MA,Qing-wei HU,Cheng-kun LIU,Guan LIAN,Guo-bin GU,Dan ZHOU. Bus speed guidance model based on station capacity limit and section green wave control [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(11): 3088-3103. |
| [2] | LI Shi-wu, XU Yi, SUN Wen-cai, WANG Lin-hong, GUO Meng-zhu, CHAI Meng. Pupil diameter based construction conflict self-feedback discrimination method [J]. 吉林大学学报(工学版), 2016, 46(2): 418-425. |
| [3] | ZHU Jin-cheng, XIAO Feng, SHUAI Bin, LIU Xiao-bo. Impact and feasibility of charging taxis in pricing zone [J]. 吉林大学学报(工学版), 2015, 45(1): 89-96. |
| [4] | ZHAO Shu-zhi, TIAN Qing-fei, CAO Yang. Transit efficiency network design model based on the restriction of station capacity [J]. 吉林大学学报(工学版), 2011, 41(增刊1): 81-84. |
|
||