Journal of Jilin University(Engineering and Technology Edition) ›› 2020, Vol. 50 ›› Issue (1): 361-374.doi: 10.13229/j.cnki.jdxbgxb20180739
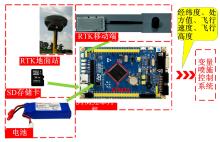
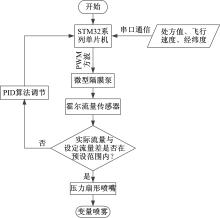
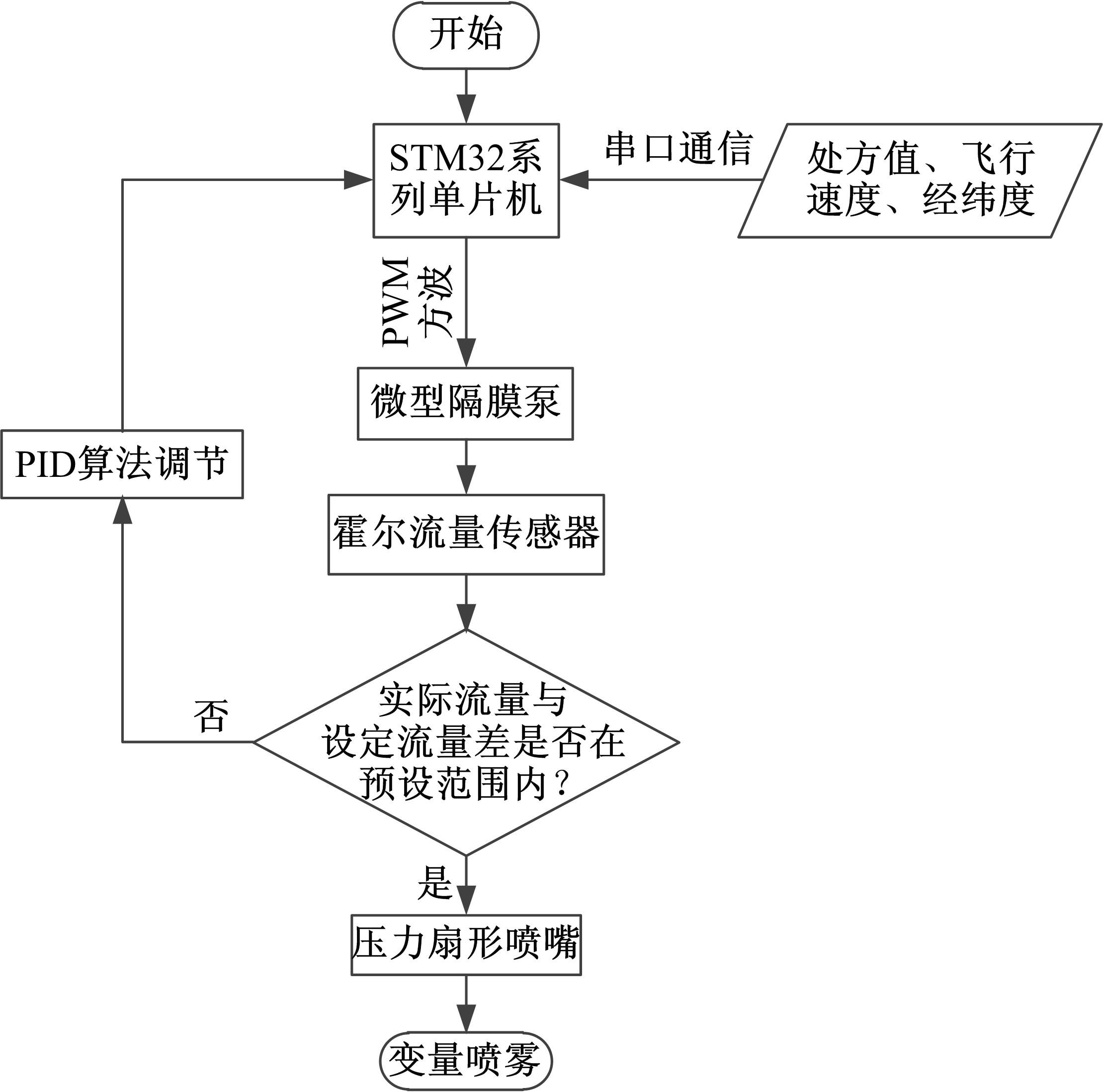
Real⁃time interpretation system of variable spray prescription map based on plant protection UAV
Rui-tao GAO1( ),Jian SHAN1,Zhou YANG1(),Sheng WEN2,Yu-bin LAN1,2,Quan-yong ZHANG1,2,Yang WANG1
),Jian SHAN1,Zhou YANG1(),Sheng WEN2,Yu-bin LAN1,2,Quan-yong ZHANG1,2,Yang WANG1
- 1. College of Engineering, South China Agricultural University, Guangzhou 510642, China
2. National Center for International Collaboration Research on Precision Agriculture Aviation Pesticides Spraying Technology, Guangzhou 510642, China
CLC Number:
- S25

















| 1 | 赵啸宇, 翟恩昱, 赵德天, 等. 面向设施农业的背负式喷杆喷雾机结构改进与性能试验[J]. 中国农机化学报, 2017, 38(11): 43-47. |
| Zhao Xiao-yu, Zhai En-yu, Zhao De-tian, et al. Structural improvement and performance test of knapsack sprayer for facility agriculture[J]. Journal of Chinese Agricultural Mechanization, 2017, 38(11): 43-47. | |
| 2 | Al-Gaadi K A, Ayers P D. Integrating GIS and GPS into a spatially-variable-rate herbicide application system[J]. Applied Engineering in Agriculture, 1999, 15(4): 255-262. |
| 3 | 张东彦, 兰玉彬, 陈立平, 等. 中国农业航空施药技术研究进展与展望[J]. 农业机械学报, 2014, 45(10): 53-59. |
| Zhang Dong-yan, Lan Yu-bin, Chen Li-ping, et al. Current status and future trends of agricultural aerial spraying technology in China[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(10): 53-59. | |
| 4 | Mohammadzamani D, Minaei S, Alimardani R, et al. Variable rate herbicide application using the global positioning system for generating a digital management map[J]. International Journal of Agriculture and Biology, 2009, 11(2): 178-182. |
| 5 | Yang Chen-hai. Integration of aerial imaging and variable-rate technology for site-specific aerial herbicide application[J]. 2017, 60(3): 635-644. |
| 6 | Guan Y, Chen D, He K, et al. Review on research and application of variable rate spray in agriculture[C]∥ IEEE 10th Conference on Industrial Electronics and Applications, New Zealand, 2015: 1575-1580. |
| 7 | 尹东富, 陈树人, 裴文超, 等. 基于处方图的室内变量喷药除草系统设计[J]. 农业工程学报, 2011, 27(4): 131-135. |
| Yin Dong-fu, Chen Shu-ren, Pei Wen-chao, et a1. Design of map-based indoor variable weed spraying system[J]. Transactions of the Chinese Society of Agricultural Engineering,2011, 27(4): 131-135. | |
| 8 | 王玲, 兰玉彬, Hoffmann W C, 等. 微型无人机低空变量喷药系统设计与雾滴沉积规律研究[J]. 农业机械学报, 2016, 47(1): 15-22. |
| Wang Ling, Lan Yu-bin, Hoffmann W C, et al. Design of variable spraying system and influencing factors on droplets deposition of small UAV[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(1): 15-22. | |
| 9 | 陈志刚, 陈梦溪, 魏新华, 等. 基于北斗定位的农田变量处方施药喷雾系统[J]. 排灌机械工程学报, 2015, 33(11): 965-970. |
| Chen Zhi-gang, Chen Meng-xi, Wei Xin-hua, et al. Variable prescription pesticide spraying system for farmland based on the Beidou navigation satellite system[J]. Journal of Drainage and Irrigation Machinery Engineering, 2015, 33(11): 965-970. | |
| 10 | 蒋焕煜, 周鸣川, 李华融, 等. PWM变量喷雾系统动态雾滴分布均匀性实验[J]. 农业机械学报, 2015, 46(3): 73-77. |
| Jiang Huan-yu, Zhou Ming-chuan, Li Hua-rong, et al. Experiment on dynamic droplet distribution uniformity forPWMvariablespray system[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3): 73-77. | |
| 11 | 邱白晶, 闫润, 马靖, 等. 变量喷雾技术研究进展分析[J]. 农业机械学报, 2015, 46(3): 59-72. |
| Qiu Bai-jing, Yan Run, Ma Jing, et al. Research progress analysis of variable rate sprayer technology[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3): 59-72. | |
| 12 | 朴丽丽, 陈英义, 申维, 等. 基于ArcGIS Engine的农用地定级决策支持系统[J]. 农业工程学报, 2008, 24(增刊2): 93-96. |
| Li-li Piao, Chen Ying-yi, Shen Wei, et al. Grading decision support system for farmland based on ArcGIS Engine[J]. Transactions of the CSAE, 2008, 24(Sup.2): 93-96. | |
| 13 | 宋宜洛. 精准施肥处方图生成系统研究与实现[D]. 成都: 电子科技大学计算机科学与工程学院, 2013. |
| Song Yi-luo. Variable precision agriculture research and implementation fertilization prescription map generation system[D]. Chengdu: School of Computer Science and Engineering, University of Electronic Science and Technology of China, 2013. | |
| 14 | 周舟, 王秀, 王俊, 等. 基于GIS的变量喷药决策支持系统[J]. 农业工程学报, 2008, 24(增刊2): 123-126. |
| Zhou Zhou, Wang Xiu, Wang Jun, et al. Decision support system for variable-rate spraying based on GIS[J]. Transactions of the Chinese Society of Agricultural Engineering, 2008, 24(Sup.2): 123-126. | |
| 15 | Thorp K R, Tian L F. Performance Study of variable-rate herbicide applications based on remote sensing imagery[J]. Biosystems Engineering, 2004, 88(1): 35-47. |
| 16 | 王利霞, 张书慧, 马成林, 等. 基于ARM 的变量喷药控制系统设计[J]. 农业工程学报, 2010, 26(4): 113-118. |
| Wang Li-xia, Zhang Shu-hui, Ma Cheng-lin, et al. Design of variable spraying system based on ARM[J]. Transactions of the Chinese Society of Agricultural Engineering, 2010, 26(4): 113-118. | |
| 17 | Sökefeld M. Variable Rate Technology for Herbicide Application[M]. Berlin: Springer, 2010: 335-347. |
| 18 | Fulton J P, Shearer S A, Higgins S F, et al. Rate response assessment from various granular VRT applicators[J]. Transactions of the American Society of Agricultural Engineers, 2005, 48(6): 2095-2103. |
| 19 | Yuan D B, Cui X M, Wang G, et al. Research on improving the accuracy of positioning data obtained by GPS module[J]. Key Engineering Materials, 2012, 500: 609-615. |
| 20 | 李冰, 曾连荪. GPS定位信息提取及应用[J]. 电子设计工程, 2012, 20(12): 72-74. |
| Li Bing, Zeng Lian-sun. GPS positioning information extraction and application[J]. Electronic Design Engineering, 2012, 20(12): 72-74. | |
| 21 | 邓巍, 丁为民, 何雄奎. PWM间歇式变量喷雾的雾化特性[J]. 农业机械学报, 2009, 40(1): 74-78. |
| Deng Wei, Ding Wei-min, He Xiong-kui. Spray characteristics of PWM-based intermittent pulse variable spray[J]. Transactions of the Chinese Society for Agricultural Machinery, 2009, 40(1): 74-78. | |
| 22 | 邱白晶, 李佐鹏, 吴昊, 等. 变量喷雾装置响应性能的试验研究[J]. 农业工程学报, 2007, 23(11): 148-152. |
| Qiu Bai-jing, Li Zuo-peng, Wu Hao, et al. Experimental study on variable-rate spraying equipment response capability[J]. Transactions of the Chinese Society of Agricultural Engineering, 2007, 23(11): 148-152. | |
| 23 | 陈盛德, 兰玉彬, 李继宇, 等. 小型无人直升机喷雾参数对杂交水稻冠层雾滴沉积分布的影响[J]. 农业工程学报, 2016, 32(17): 40-46. |
| Chen Sheng-de, Lan Yu-bin, Li Ji-yu, et al. Effect of spray parameters of small unmanned helicopter on distribution regularity of droplet deposition in hybrid rice canopy[J]. Transactions of the Chinese Society of Agricultural Engineering, 2016, 32(17): 40-46. | |
| 24 | 王大帅, 张俊雄, 李伟,等. 植保无人机动态变量施药系统设计与试验[J]. 农业机械学报, 2017, 48(5): 86-93. |
| Wang Da-shuai, Zhang Jun-xiong, Li Wei, et al. Design and test of the dynamic variable spraying system of plant protection UAV[J]. Transactions of the Chinese Society of agricultural Machinery, 2017, 48(5): 86-93. | |
| 25 | 张吉利. 农用航空喷雾系统的试验与研究[J]. 农业技术与装备, 2014(5): 56-59. |
| Zhang Ji-li. Experiment and research on agricultural aerosol spray system[J] Agricultural Technology and Equipment, 2014(5): 56-59. | |
| 26 | 中国民用航空总局运输管理司.中华人民共和国民用航空行业标准:第一部分 农业航空作业质量技术指标:MH/T1002-2016[M]. 北京:中国民用航空局,2016. |
| 27 | 陈盛德, 兰玉彬, 李继宇, 等. 植保无人机航空喷施作业有效喷幅的评定与试验[J]. 农业工程学报, 2017, 33(7): 82-90. |
| Chen Sheng-de, Lan Yu-bin, Li Ji-yu, et al. Evaluation and test of effective spraying width of aerial spraying on plant protection UAV[J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(7): 82-90. |
| [1] | WU Wei-nan,CUI Nai-gang,GUO Ji-feng,ZHAO Yang-yang. Distributed integrated method for mission planning of heterogeneous unmanned aerial vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1827-1837. |
| [2] | JIA Hong-lei, WANG Wan-peng, CHEN Zhi, ZHUANG Jian, WANG Wen-jun, LIU Hui-li. Real-time pressure measurement of profiling elastic press roller based on soil cone index [J]. 吉林大学学报(工学版), 2018, 48(4): 1169-1175. |
| [3] | CHEN Qiang, XU Hong-guo, TAN Li-dong. Surveying method of traffic accident scene based on SUAV photogrammetry [J]. 吉林大学学报(工学版), 2016, 46(5): 1439-1446. |
| [4] | ZHANG Qiang, YU Lu-lu, JIA Hong-lei. Design and experiment of handling mechanism for tractors [J]. 吉林大学学报(工学版), 2012, 42(增刊1): 108-112. |
| [5] | WANG Zeng-hui, HUANG Dong-yan, LI Zhuo-shi, JIA Hong-lei, WAN Bao-cheng. Universal the blade the broken stubble power consumption influence of the working parameters of the rotary tiller broken stubble [J]. 吉林大学学报(工学版), 2012, 42(增刊1): 122-125. |
| [6] | XIONG Hai-liang, SUN De-chun,TIAN Hong-xin,YANG Hong,YI Ke-chu. Uplink data transmission scheme for unmanned aerial vehicle [J]. 吉林大学学报(工学版), 2010, 40(01): 276-0280. |
| [7] | CHEN Mou, XIAO Jian, JIANG Chang-sheng . Three dimensional path planning of UAV with improved ant algorithm [J]. 吉林大学学报(工学版), 2008, 38(04): 991-995. |
| [8] | Liu Hui;Wang Mao-hua;Wang Yue-xuan;Ma Dao-kun;Li Hai-xia. Development of farmland soil moisture and temperature monitoring system based on wireless sensor network [J]. 吉林大学学报(工学版), 2008, 38(03): 604-0608. |
|
||