Journal of Jilin University(Engineering and Technology Edition) ›› 2020, Vol. 50 ›› Issue (1): 140-146.doi: 10.13229/j.cnki.jdxbgxb20181224
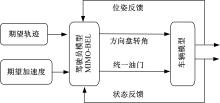
Driver model based on transverse and longitudinal integrated control of MIMO brain-like emotional learning circuits
Zhen SUI( ),Yuan JIANG
),Yuan JIANG
- College of Communication Engineering, Jilin University, Changchun 130022,China
CLC Number:
- U491









| 1 | Balkenius C , Morén J . Emotional learning: a computational model of the amygdala[J]. Cybernetics & Systems, 2001, 32(6): 611-636. |
| 2 | Ali Reza Mehrabian, Lucas Caro . Emotional learning based intelligent robust adaptive controller for stable uncertain nonlinear systems[J]. International Scholarly and Scientific Research & Innovation, 2008, 2(7): 946-952. |
| 3 | Mohammdi-Milasi R , Lucas C , Najar-Arrabi B . A novel controller for a power system based BELBIC (Brain Emotional Learning Based Intelligent Controller)[C]∥Intelligent Automations and Control-Trends, Principles and Application, London,UK,2004: 409-419. |
| 4 | Mehrabin A R , Lucas C . A toolbox for brain emotional learning based intelligent controller[C]∥IEEE International Conference on Engineering of Intelligent Systems, Islamabad, Pakistan, 2006. |
| 5 | 王上飞, 王煦法 . 基于大脑情感回路的人工情感智能模型[J]. 模式识别与人工智能, 2007, 20(2): 167-172. |
| Wang Shang-fei , Wang Xu-fa . Brain emotion circuit based artificial emotional intelligence model[J]. Pattern Recognition and Artificial Intelligence, 2007, 20(2): 167-172. | |
| 6 | 程慧 .两点预瞄驾驶员转向模型研究[D]. 南京:南京航空航天大学能源与动力学院, 2016. |
| Cheng Hui . Research on Driver Steering Model Based on Two-Point Preview[D]. Nanjing: College of Energy and Power Engineering, Nanjing University of Aeronautics and Astronautics,2016. | |
| 7 | 顾筠, 林小宁 . 基于大脑情感学习回路的驾驶员模型研究[J]. 现代电子技术, 2017, 40(24): 127-130. |
| Gu Yun , Lin Xiao-ning . Research on driver model based on brain emotional learning loop[J]. Modern Electronics Technique, 2017, 40(24): 127-130. | |
| 8 | El-Saify M H , El-Garhy A M , El-Sheikh G A . Brain emotional learning based intelligent decoupler for nonlinear multi-input multi-output distillation columns[J]. Mathematical Problems in Engineering, 2017. |
| 9 | El-Saify M H , El-Sheikh G A , El-Garhy A M . Novel multi-input multi-output brain emotional learning based intelligent controller for PUMA 560 robotic arm[C]∥International Conference on Advanced Intelligent Systems and Informatics, Springer, Cham, 2017: 81-93. |
| 10 | Ravi R , Mija S J . Design of brain emotional learning based intelligent controller(BELBIC) for uncertain systems[C]∥International Conference on Advanced Communication Control & Computing Technologies, Ramanathapuram, India, 2015. |
| 11 | 曹建永 . 复杂行驶工况下的驾驶员模型[D]. 长春:吉林大学汽车工程学院, 2007. |
| Cao Jian-yong . The driver model under complex driving conditions[D]. Changchun: College of Automotive Engineering, Jilin University,2007. | |
| 12 | 李英 . 方向与速度综合控制驾驶员模型及在ADAMS中的应用[D]. 长春:吉林大学汽车工程学院, 2007. |
| Li Ying . Direction control and speed control combined driver model its application in ADAMS[D]. Changchun: College of Automotive Engineering, Jilin University, 2007. | |
| 13 | Land M F , Lee D N . Where we look when we steer[J]. Nature, 1994, 369(6483): 742-744. |
| 14 | Land M , Horwood J . Which parts of the road guide steering?[J]. Nature, 1995, 377(6547): 339-340. |
| 15 | Salvucci D D , Gray R . A two-point visual control model of steering[J]. Perception, 2004, 33(10): 1233-1248. |
| 16 | 丁海涛, 郭孔辉, 李飞, 等 . 基于加速度反馈的任意道路和车速跟随控制驾驶员模型[J]. 机械工程学报, 2010, 46(10): 116-120, 125. |
| Ding Hai-tao , Guo Kong-hui , Li Fei , et al . Arbitrary path and speed following driver model based on vehicle acceleration feedback[J]. Journal of Mechanical Engineering, 2010, 46(10): 116-120, 125. |
| [1] | Yu-lin CHANG,Cai-hong YUAN,Chao SUN,Peng ZHANG. Calculation method for actual impedance of urban network based on improved cell transmission model [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(1): 132-139. |
| [2] | LIU Tao, GUO Kong-hui. Driver model used in vehicle tire blow-out simulation [J]. , 2012, 42(05): 1077-1082. |
| [3] | LI Wei, DUAN Jian-min, GONG Jian-wei. Adaptive sliding mode control for uncertain systems with state time-delay and known external disturbances [J]. 吉林大学学报(工学版), 2011, 41(增刊1): 249-253. |
| [4] | Song Min, Chen Yudong, Chen Suhuan. Robustness analysis of responses of vibration control structures with uncertain parameters [J]. 吉林大学学报(工学版), 2006, 36(增刊1): 38-0041. |
| [5] |
Zhang Tao;Li Yuan-chun .
Robust controller design for uncertain systems with input delay based on LMI approach [J]. 吉林大学学报(工学版), 2006, 36(06): 924-0928. |
| [6] | Song Min,, Chen Yudong, Chen Suhuan. Stability Robustness of Closedloop System with Uncertain Parameters Using Interval Analysis [J]. 吉林大学学报(工学版), 2006, 36(01): 5-0009. |
|
||