Journal of Jilin University(Engineering and Technology Edition) ›› 2020, Vol. 50 ›› Issue (5): 1913-1922.doi: 10.13229/j.cnki.jdxbgxb20190609
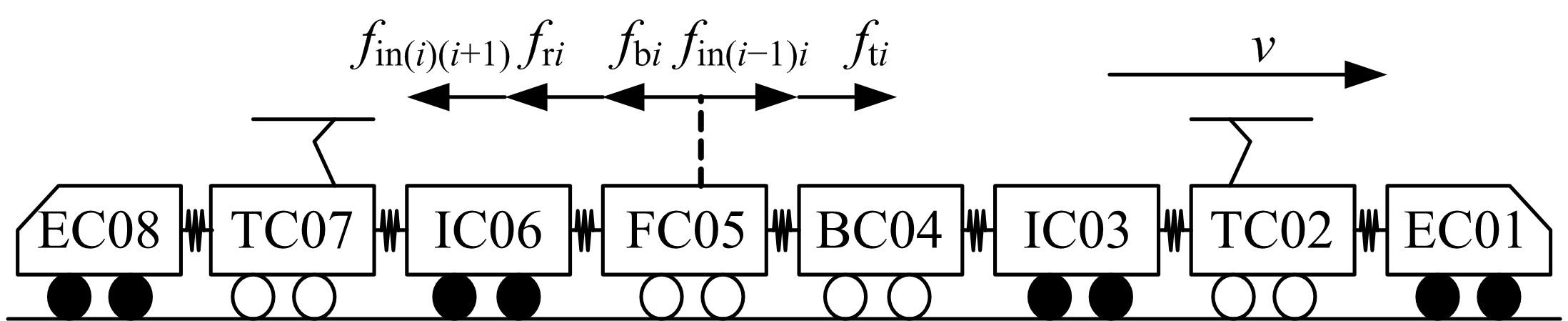
Nonlinear model predictive control for automatic train operation based on multi⁃point model
Chao JIA1( ),Hong-ze XU1,Long-sheng WANG2
),Hong-ze XU1,Long-sheng WANG2
- 1.School of Electronic and Information Engineering,Beijing Jiaotong University,Beijing 100044,China
2.Signal & Communication Research Institute,China Academy of Railway Sciences,Beijing 100081,China
CLC Number:
- U284.48




| 1 | Dong H, Ning B, Cai B, et al. Automatic train control system development and simulation for high-speed railways[J]. IEEE Circuits and Systems Magazine, 2010, 10(2): 6-18. |
| 2 | 郭红戈, 谢克明. 动车组列车制动系统的Hammerstein模型及其参数辨识方法[J]. 铁道学报, 2014, 36(4): 48-53. |
| Guo Hong-ge, Xie Ke-ming. Hammerstein model and parameters identification of EMU braking system[J]. Journal of the China Railway Society, 2014, 36(4): 48-53. | |
| 3 | 唐涛, 黄良骥. 列车自动驾驶系统控制算法综述[J]. 铁道学报, 2003, 25(2): 98-102. |
| Tang Tao, Huang Liang-ji. A survey of control algorithm for automatic train operation[J]. Journal of the China Railway Society, 2003, 25(2): 98-102. | |
| 4 | 石卫师. 基于无模型自适应控制的城轨列车自动驾驶研究[J]. 铁道学报, 2016, 38(3): 72-77. |
| Shi Wei-shi. Research on automatic train operation based on model-free adaptive control[J]. Journal of the China Railway Society, 2016, 38(3): 72-77. | |
| 5 | Oshima H, Yasunobu S, Sekino S I. Automatic train operation system based on predictive fuzzy control[C]∥Proceedings of the International Workshop on Artificial Intelligence for Industrial Applications, Hitachi, Japan, 1988: 485-489. |
| 6 | 余进, 钱清泉, 何正友. 两级模糊神经网络在高速列车ATO系统中的应用研究[J]. 铁道学报, 2008, 30(5): 52-56. |
| Yu Jin, Qian Qing-quan, He Zheng-you. Research on application of two-degree fuzzy neural network in ATO of high speed train[J]. Journal of the China Railway Society, 2008, 30(5): 52-56. | |
| 7 | Sun H Q, Hou Z S, Tang T. An iterative learning approach for train trajectory tracking control[C]∥Proceedings of the International Federation of Automatic Control, Milano, Italy, 2011: 14916-14921. |
| 8 | 罗恒钰, 徐洪泽. 基于参考模型的ATO自适应控制算法研究[J]. 铁道学报, 2013, 35(7): 68-73. |
| Luo Heng-yu, Xu Hong-ze. Study on model reference adaptive control of ATO systems[J]. Journal of the China Railway Society, 2013, 35(7): 68-73. | |
| 9 | 冷勇林, 陈德旺, 阴佳腾. 基于专家系统及在线调整的列车智能驾驶算法[J]. 铁道学报, 2014, 36(2): 62-68. |
| Leng Yong-lin, Chen De-wang, Yin Jia-teng. An intelligent train operation(ITO) algorithm based on expert system and online adjustment[J]. Journal of the China Railway Society, 2014, 36(2): 62-68. | |
| 10 | 王龙生, 徐洪泽, 张梦楠, 等. 基于混合系统模型预测控制的列车自动驾驶策略[J]. 铁道学报, 2015, 37(12): 53-60. |
| Wang Long-sheng, Xu Hong-ze, Zhang Meng-nan, et al. Hybrid model predictive control application to automatic train operation[J]. Journal of the China Railway Society, 2015, 37(12): 53-60. | |
| 11 | 王义惠, 罗仁士, 于振宇, 等. 考虑列车ATP限速的ATO控制算法研究[J]. 铁道学报, 2012, 34(5): 59-64. |
| Wang Yi-hui, Luo Ren-shi, Yu Zhen-yu, et al. Study on ATO control algorithm with consideration of ATP speed limits[J]. Journal of the China Railway Society, 2012, 34(5): 59-64. | |
| 12 | Zhang L J, Zhuan X T. Optimal operation of heavy-haul trains equipped with electronically controlled pneumatic brake systems using model predictive control methodology[J]. IEEE Transactions on Control Systems Technology, 2013, 22(1): 13-22. |
| 13 | Zhang L, Zhuan X. Development of an optimal operation approach in the MPC framework for heavy-haul trains[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 16(3): 1391-1400. |
| 14 | Zhuan X, Xia X. Speed regulation with measured output feedback in the control of heavy haul trains[J]. Automatica, 2008, 44(1): 242-247. |
| 15 | 杨辉, 张坤鹏, 王昕, 等. 高速列车多模型广义预测控制方法[J]. 铁道学报, 2011, 33(8): 80-87. |
| Yang Hui, Zhang Kun-peng, Wang Xin, et al. Generalized multiple-model predictive control method of high-speed train[J]. Journal of the China Railway Society, 2011, 33(8): 80-87. | |
| 16 | 杨罡, 刘光明, 喻乐. 高速列车运行过程的非线性预测控制[J]. 铁道学报, 2013, 35(8): 16-21. |
| Yang Gang, Liu Guang-ming, Yu Le. Nonlinear predictive control of operation process of high-speed train[J]. Journal of the China Railway Society, 2013, 35(8): 16-21. | |
| 17 | 姚拴宝, 郭迪龙, 杨国伟, 等. 高速列车气动阻力分布特性研究[J]. 铁道学报, 2012, 34(7): 18-23. |
| Yao Shuan-bao, Guo Di-long, Yang Guo-wei, et al. Distribution of high-speed train aerodynamic drag[J]. Journal of the China Railway Society, 2012, 34(7): 18-23. | |
| 18 | Yang C D, Sun Y P. Mixed H2/H∞ cruise controller design for high speed train[J]. International Journal of Control, 2001, 74(9): 905-920. |
| 19 | Besselmann T, Lofberg J, Morari M. Explicit MPC for LPV systems: stability and optimality[J]. IEEE Transactions on Automatic Control, 2012, 57(9): 2322-2332. |
| [1] | Da-yi QU,Yan-feng JIA,Dong-mei LIU,Jing-ru YANG,Wu-lin WANG. Dynamic partitioning method for road network intersection considering multiple factors [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(5): 1478-1483. |
| [2] | Hua⁃yue WU,Li⁃ren DUAN. Unstructured road detection method based on RGB entropy and improved region growing [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 727-735. |
| [3] | TAO Tao, XU Hong-ze. Immersion and invariance fault-tolerant control for a class high-speed trains [J]. 吉林大学学报(工学版), 2015, 45(2): 554-561. |
| [4] | SHI Yi-ran, TIAN Yan-tao, SHI Hong-wei, ZHANG Li. Modified Volterra model based nonlinear model predicting control for air-fuel ratio of SI engines [J]. 吉林大学学报(工学版), 2014, 44(2): 538-547. |
|
||