Journal of Jilin University(Engineering and Technology Edition) ›› 2024, Vol. 54 ›› Issue (12): 3711-3716.doi: 10.13229/j.cnki.jdxbgxb.20231307
Previous Articles Next Articles
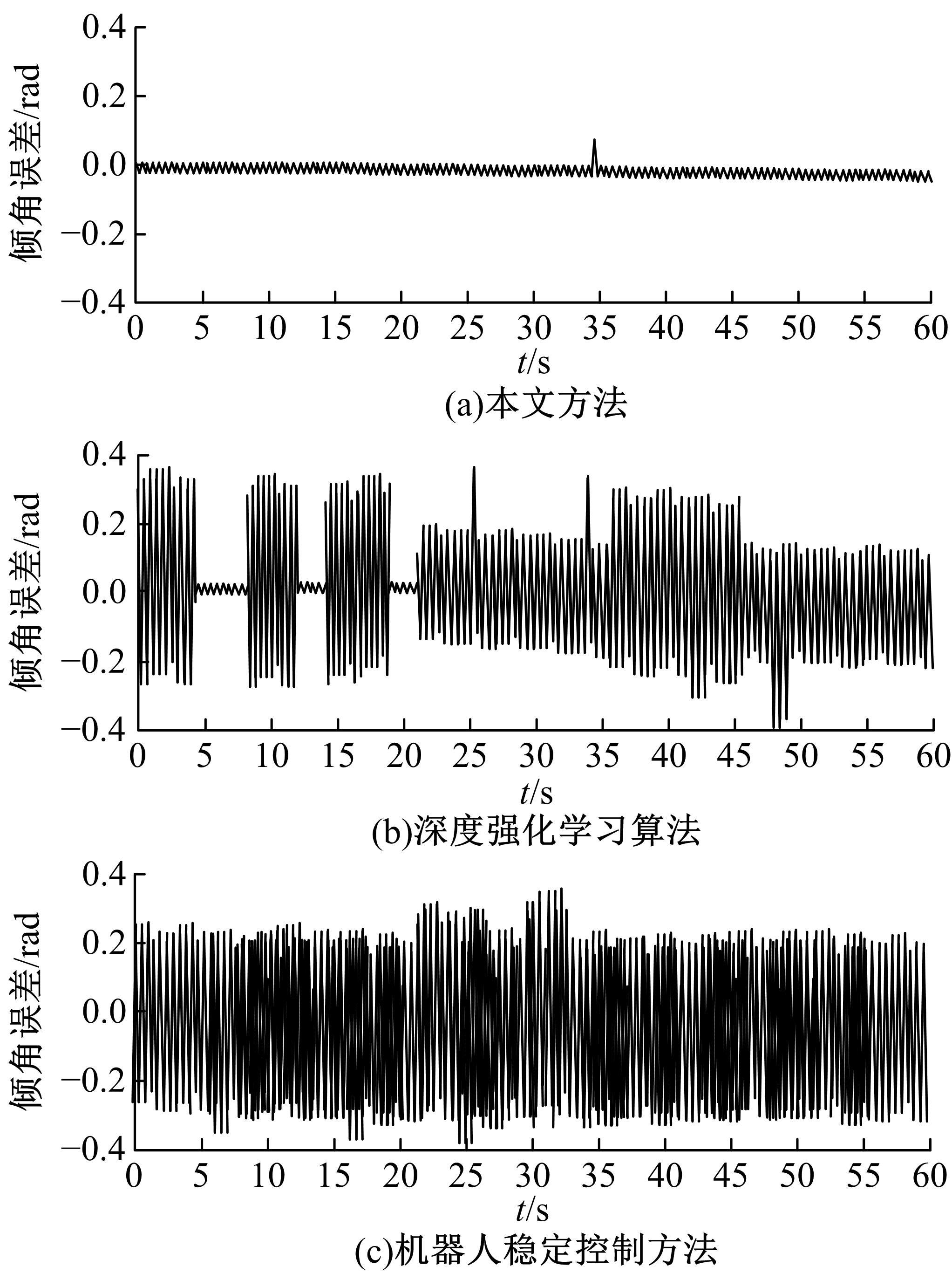
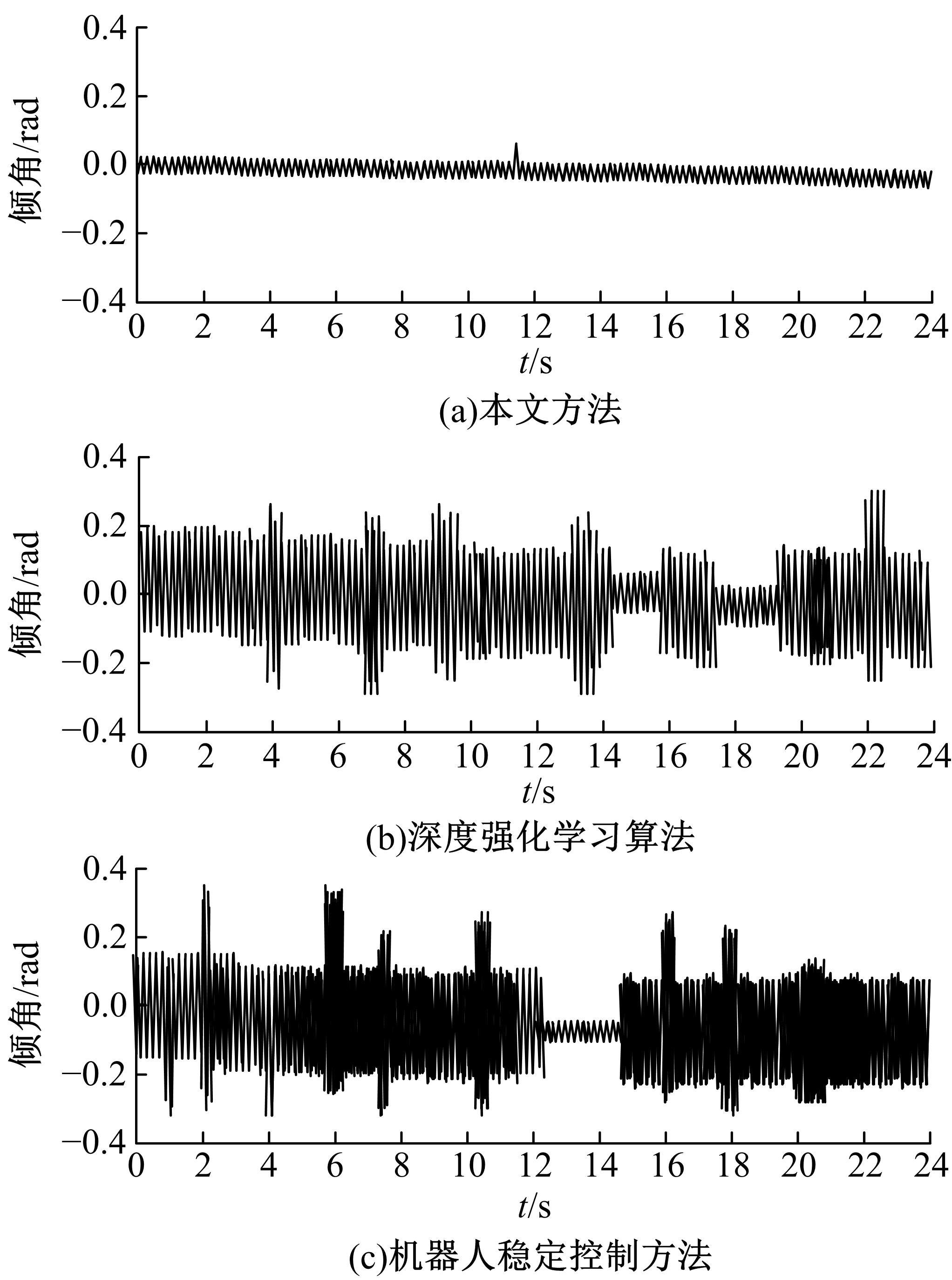
Dynamic attitude stability control method for biped walking robot based on differential equations of motion
Chun-yan ZHAO( ),Jing-chun PENG
),Jing-chun PENG
- College of Science,Heilongjiang University of Science and Technology,Harbin 150022,China
CLC Number:
- TP25


| 1 | 吴晓光, 刘绍维, 杨磊, 等. 基于深度强化学习的双足机器人斜坡步态控制方法[J]. 自动化学报, 2021, 47(8): 1976-1987. |
| Wu Xiao-guang, Liu Shao-wei, Yang Lei,et al. A gait control method for biped robot on slope based on deep reinforcement learning[J]. Acta Automatica Sinica, 2021, 47(8): 1976-1987. | |
| 2 | 廖发康, 周亚丽, 张奇志. 变长度柔性双足机器人行走控制及稳定性分析[J]. 计算机应用, 2023, 43(1): 312-320. |
| Liao Fa-kang, Zhou Ya-li, Zhang Qi-zhi. Walking control and stability analysis of flexible biped robot with variable length legs[J]. Journal of Computer Applications, 2023,43(1): 312-320. | |
| 3 | 尹孟可, 郭士杰, 孙磊, 等. 下肢步行助力外骨骼机器人的模糊自适应PID控制[J]. 机械设计, 2021, 38(9): 38-44. |
| Yin Meng-ke, Guo Shi-jie, Sun Lei, et al. Fuzzy adaptive PID control of the lower-limb walking-assistance exoskeleton robot[J]. Journal of Machine Design, 2021,38(9): 38-44. | |
| 4 | 于晓春, 贾骏恺, 李化洋, 等.六足机器人半被动行走步态控制方法及其动力学仿真[J]. 机械设计与研究, 2022, 38(1): 55-61. |
| Yu Xiao-chun, Jia Jun-kai, Li Hua-yang, et al. Research on the control method and dynamic simulation of semi-passive walking gait of hexapod robot[J]. Machine Design & Research, 2022, 38(1): 55-61. | |
| 5 | 刘莹, 邵彧.利用姿态传感器多点位控制机器人交互方法[J].机械设计与制造, 2023(2): 266-269. |
| Liu Ying, Shao Yu. Multi-point control robot interaction method using attitude sensor[J]. Machinery Design & Manufacture, 2023(2): 266-269. | |
| 6 | 钟浩然, 李新宇, 高亮, 等.适应非平整地面的双足机器人柔顺步态优化方法[J]. 华中科技大学学报: 自然科学版, 2021, 49(7): 97-102. |
| Zhong Hao-ran, Li Xin-yu, Gao Liang, et al. Gait planning optimization method for biped robots compliant walking on uneven terrain[J]. Journal of Huazhong University of Science and Technology (Natural Science Edition), 2021, 49(7): 97-102. | |
| 7 | 周友行,赵晗妘,刘汉江,等.采用DDPG的双足机器人自学习步态规划方法[J].计算机工程与应用,2021, 57(6): 254-259. |
| Zhou You-xing, Zhao Han-yun, Liu Han-jiang, et al. Self-Learning gait planning method for biped robot using DDPG[J]. Computer Engineering and Applications, 2021, 57(6): 254-259. | |
| 8 | 艾青林, 蒋锦涛, 刘刚江, 等. 基于遗传算法与模糊分数阶PID的钢结构损伤检测机器人姿态控制[J].高技术通讯, 2022, 32(6): 615-623. |
| Ai Qing-lin, Jiang Jin-tao, Liu Gang-jiang, et al. Attitude control of steel structure damage detection robot based on genetic algorithm and fuzzy fractional PID[J]. Chinese High Technology Letters, 2022, 32(6): 615-623. | |
| 9 | 张德伟, 刘海涛, 王仙业, 等.一种足式移动机器人的混合视觉伺服控制方法[J].机械科学与技术, 2022, 41(12): 1805-1814. |
| Zhang De-wei, Liu Hai-tao, Wang Xian-ye, et al. Hybrid visual servoing control of a legged mobile robot[J]. Mechanical Science and Technology for Aerospace Engineering, 2022,41(12):1805-1814. | |
| 10 | 王敏, 蒋金伟, 曹彦陶. 基于改进粒子群的食品分拣机器人动态目标抓取控制方法[J]. 食品与机械, 2022, 38(3): 86-91. |
| Wang Min, Jiang Jin-wei, Cao Yan-tao. Dynamic target grasping control method of food sorting robot based on improved particle swarm optimization[J]. Food and Machinery, 2022,38(3):86-91. | |
| 11 | Ma, B, Li Y C, An T J,et al.Compensator-critic structure-based neuro-optimal control of modular robot manipulators with uncertain environmental contacts using non-zero-sum games[J].Knowledge-based Systems,2021,224(7):107100.1-107100.14. |
| 12 | Hartmann V N, Orthey A, Driess D,et al.Long-Horizon multi-robot rearrangement planning for construction assembly[J].IEEE Transactions on Robotics: A Publication of the IEEE Robotics and Automation Society, 2023, 39(1): 239-252. |
| 13 | Wang N, Xiang X, Jiang Y,et al.Modelling and vibration control for deep-sea robot lifting system with time variable length and nonlinear disturbance observer[J].Ocean Engineering, 2022, 246(2):No.110558. |
| 14 | Liu Y Q, Liu X F, Cai G P, et al.Trajectory planning and coordination control of a space robot for detumbling a flexible tumbling target in post-capture phase[J].Multibody System Dynamics,2021,52(3):281-311. |
| 15 | Zhi Q T, Ho L H, Kai Y T,et al.Model-based online learning and adaptive control for a "human-wearable soft robot" integrated system[J].International Journal of Robotics Research,2021, 40(1): 256-276. |
| 16 | Chen L, Liu J, Wang H,et al.Robust control of reaction wheel bicycle robot via adaptive integral terminal sliding mode[J].Nonlinear Dynamics,2021,104(4): No.4753. |
| 17 | Yan, Z P, Yang H Y, Zhang W,et al.Robust nonlinear model predictive control of a bionic underwater robot with external disturbances[J].Ocean Engineering,2022, 253(1): No.111310. |
| No related articles found! |
|