Journal of Jilin University(Engineering and Technology Edition) ›› 2021, Vol. 51 ›› Issue (1): 63-71.doi: 10.13229/j.cnki.jdxbgxb20190912
Previous Articles Next Articles
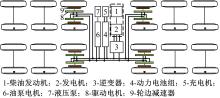
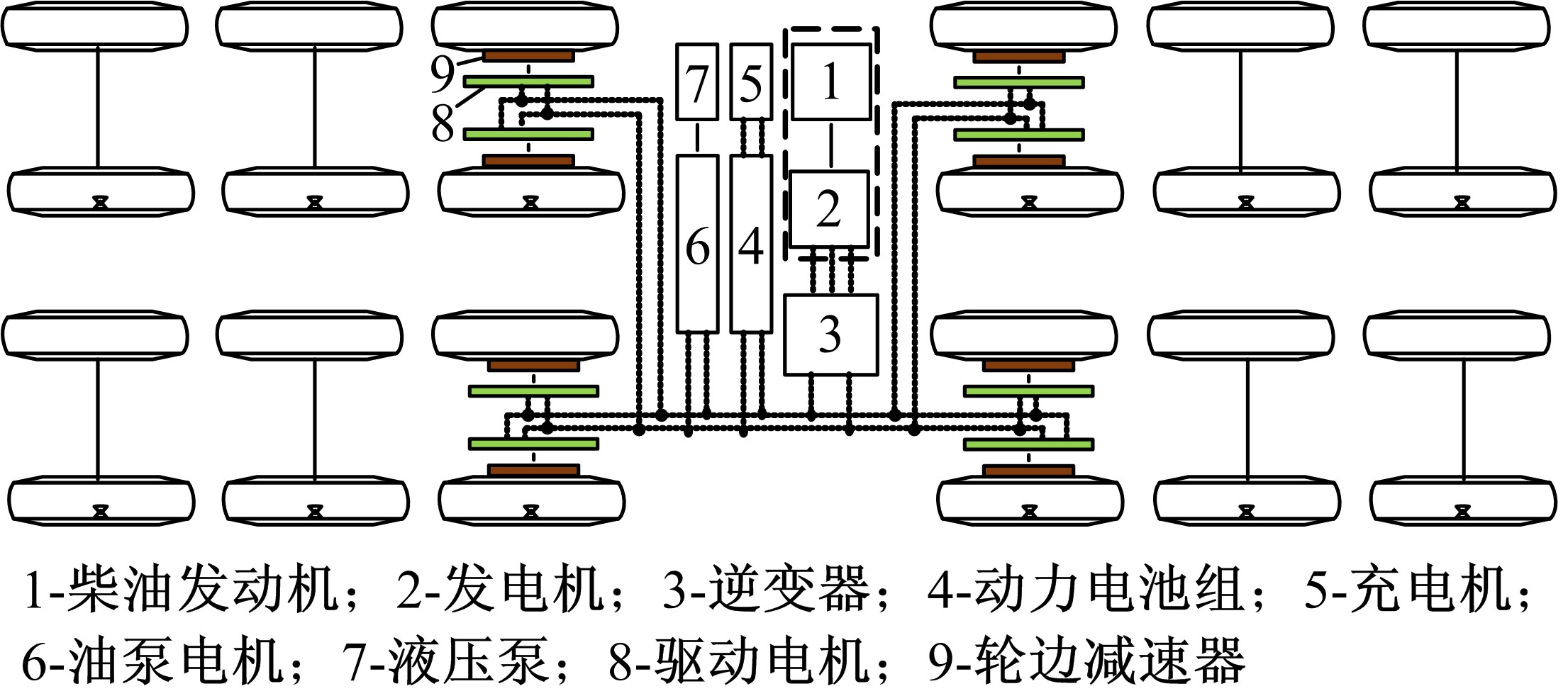
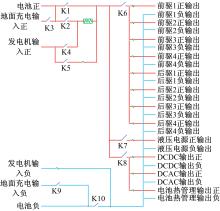
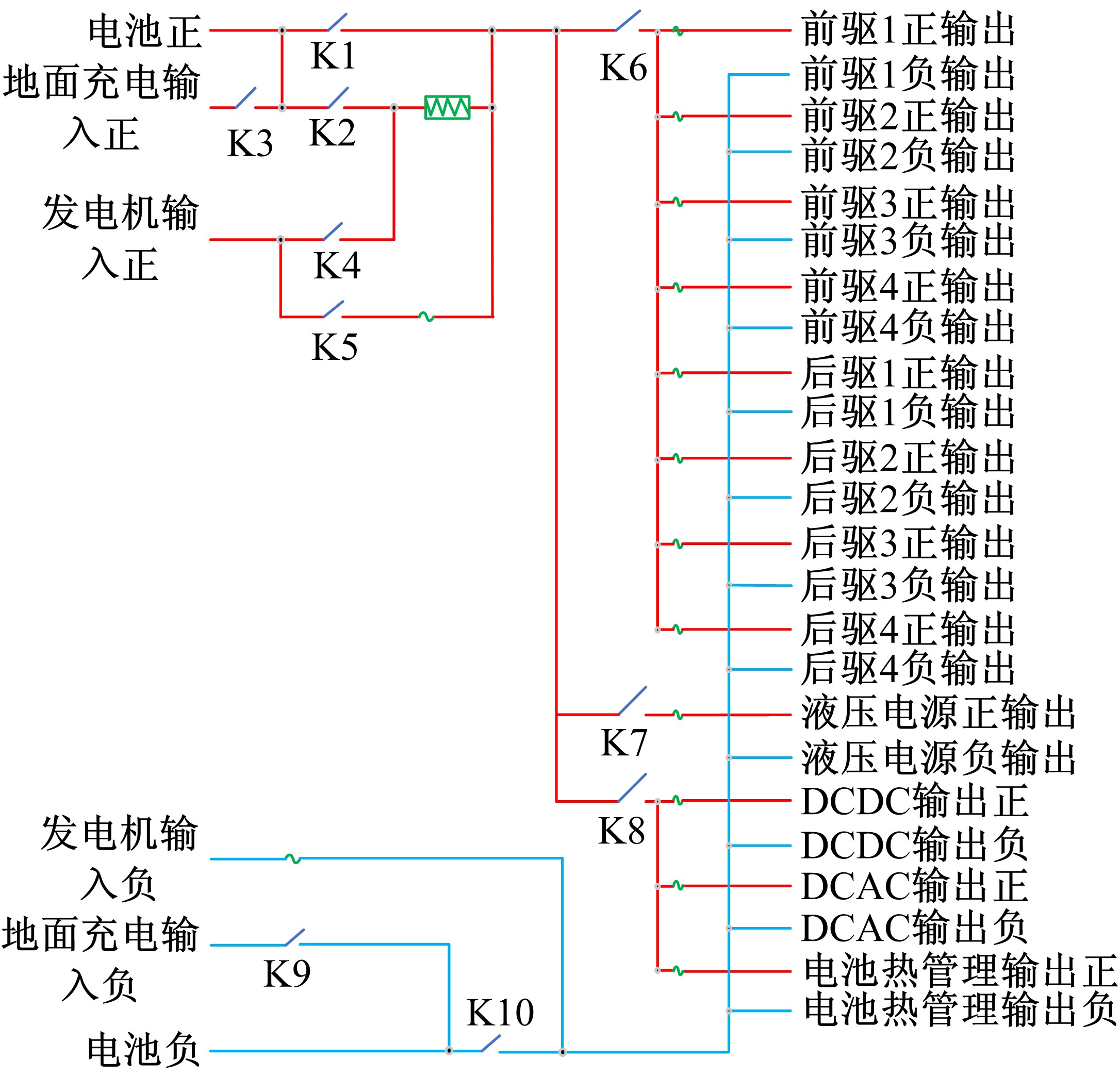
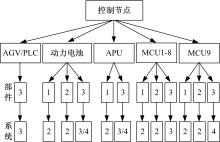
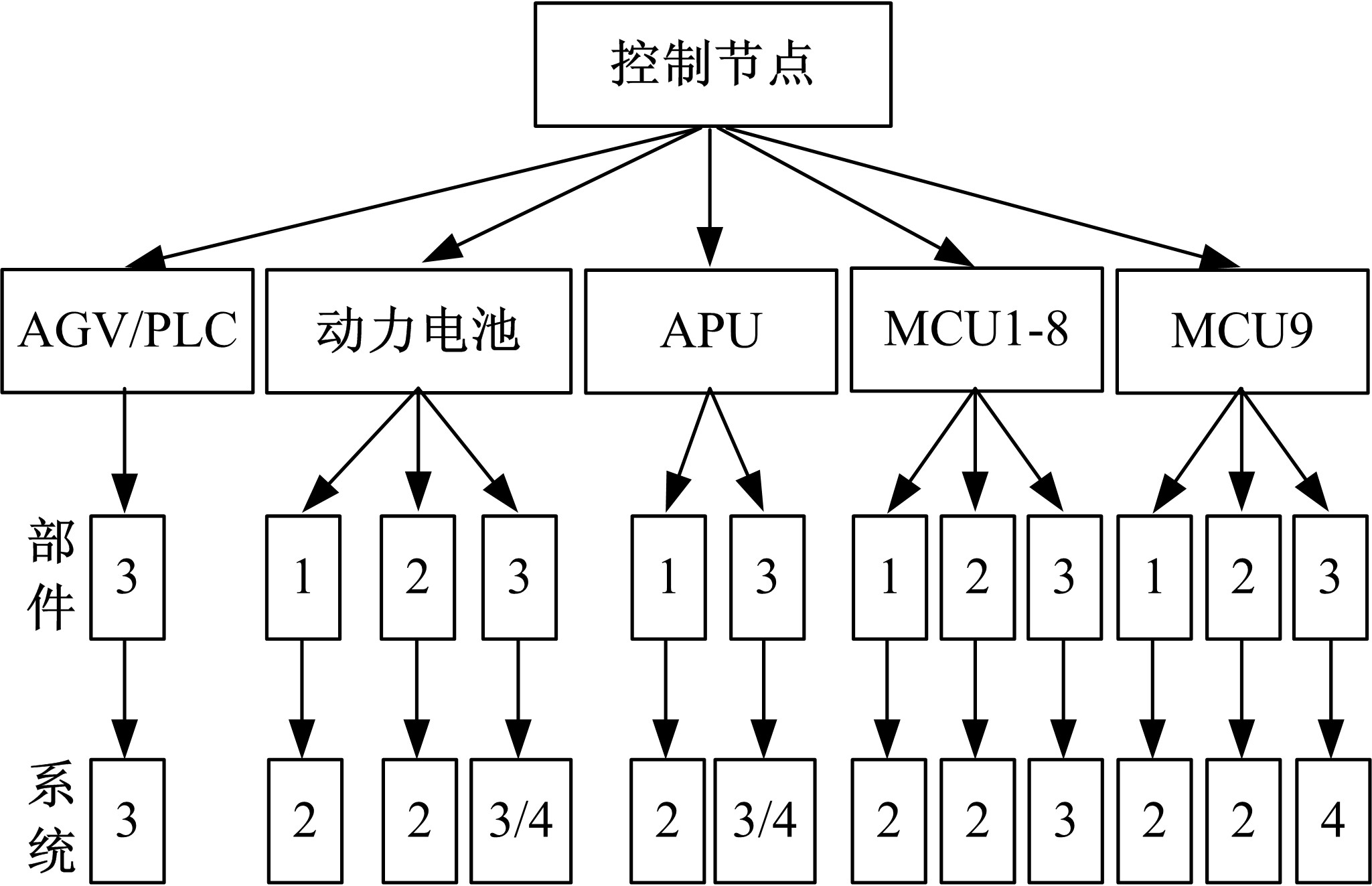
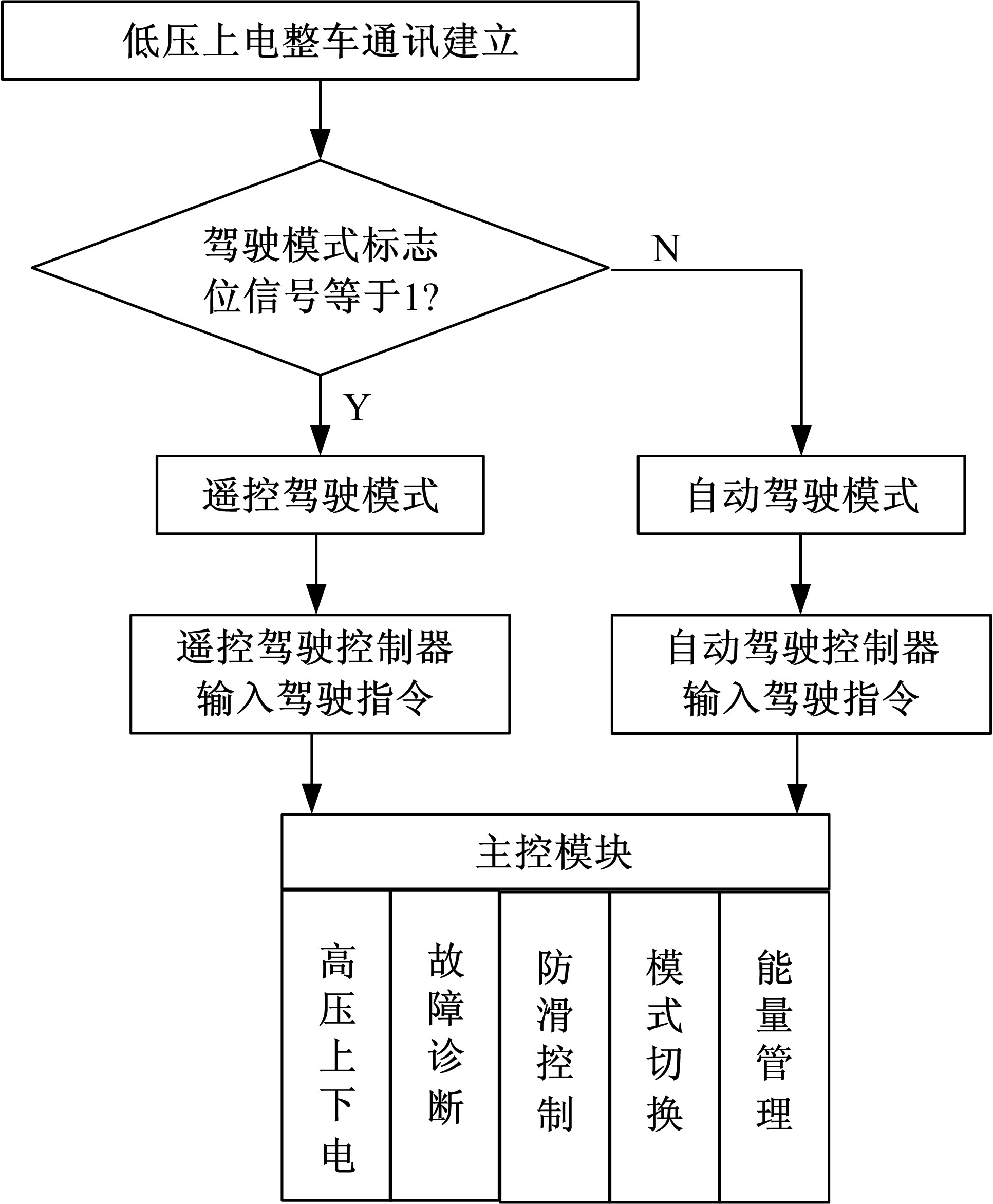
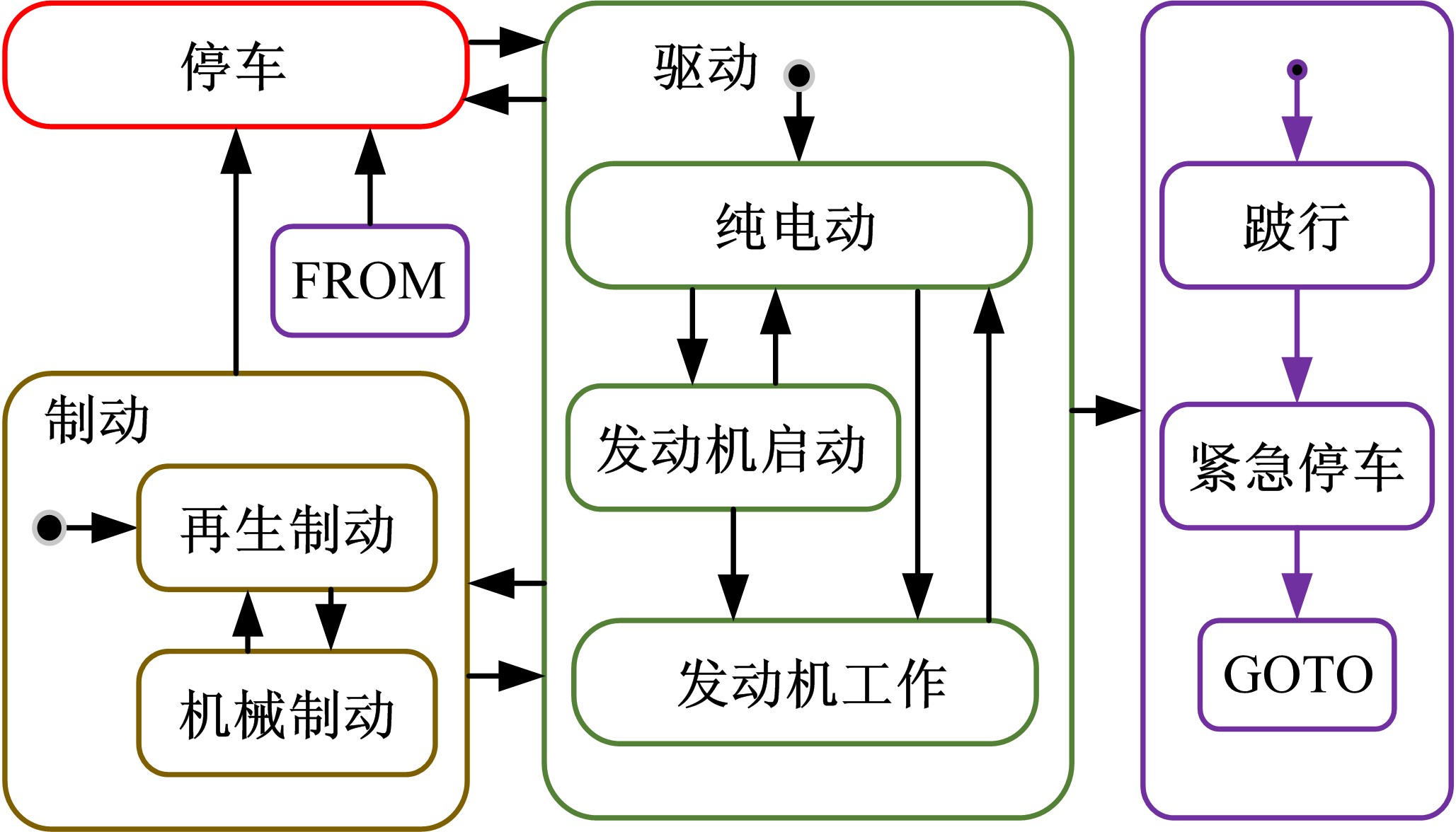
Development of vehicle controller for multi-wheel hybrid-driven unmanned frame vehicle
Xiao-hua ZENG1( ),Xiao-jian LI1,Shao-feng DU2(),Tao MA2,Zhen-wei WANG1,Da-feng SONG1
),Xiao-jian LI1,Shao-feng DU2(),Tao MA2,Zhen-wei WANG1,Da-feng SONG1
- 1.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
2.State Key Laboratory of Smart Manufacturing for Special Vehicles and Transmission System,Inner Mongolia First Machinery Group Corporation,Baotou 014030,China
CLC Number:
- U469.79











| 1 | 刘银. 纯电动物流车整车控制器的研究与开发[D].济南: 山东大学能源与动力工程学院, 2018. |
| Liu Yin. Research and development of vehicle controller for pure electric logistics vehicles[D]. Jinan: School of Energy and Power Engineering, Shandong University, 2018. | |
| 2 | Zhu Zhong-wen, Wang Xu, Huang Wei, et al. The development of an advanced vehicle control platform for pure electric vehicles[C]∥SAE Paper, 2015-01-0229. |
| 3 | Wang H, Yuwen Z, Fang Y, et al. Development of pure electric vehicle powertrain controller based on hardware in the loop platform[C]∥The 6th IEEE International Conference on Software Engineering and Service Science(ICSESS), Beijing, China, 2015: 522-526. |
| 4 | 蔡潇扬, 鲍宁, 袁所贤. 基于Simulink的电动客车整车控制器软件层设计[J]. 重庆理工大学学报:自然科学, 2018, 32(6): 14-20. |
| Cai Xiao-yang, Bao Ning, Yuan Sou-xian. Design of software layer of the vehicle controller in the passenger car based on simulink[J]. Journal of Chongqing University of Technology(Natural Science), 2018, 32(6): 14-20. | |
| 5 | 吕建龙, 张兴起, 程济秋, 等. 某新能源物流车整车控制策略[J].汽车工程师, 2019(7): 15-18. |
| Jian-long Lü, Zhang Xing-qi, Cheng Ji-qiu, et al. The vehicle control strategy of a new energy logistics vehicle[J]. Automotive Engineer, 2019(7): 15-18. | |
| 6 | 郑潮雄. 低速纯电动汽车整车控制器的研究与开发 [D]. 长沙: 湖南大学机械与运载工程学院, 2016. |
| Zheng Chao-xiong. Research and development of vehicle controller for low-speed pure electric vehicles [D]. Changsha: College of Mechanical and Transportation Engineering, Hunan University, 2016. | |
| 7 | 武启平, 金亚萍, 任平, 等. 自动导引车(AGV)关键技术现状及其发展趋势[J]. 制造业自动化, 2013, 35(10): 106-109, 121. |
| Wu Qi-ping, Jin Ya-ping, Ren Ping, et al. Present situation and developing trend of AGV key technology[J]. Manufacturing Automation, 2013, 35(10): 106-109, 121. | |
| 8 | 吕川. 基于PLC的全向移动机器人控制系统设计 [D]. 合肥: 合肥工业大学机械工程学院, 2015. |
| Chuan Lyu. Design of omnidirectional mobile robot control system based on PLC[D]. Hefei: College of Mechanical Engineering, Hefei University of Technology, 2015. | |
| 9 | 郭文涛. 轮毂电机电动汽车驱动防滑控制研究[D]. 锦州: 辽宁工业大学汽车与交通工程学院, 2016. |
| Guo Wen-tao. Research on anti-skid control of wheel motor electric vehicle[D]. Jinzhou: School of Automobile and Traffic Engineering, Liaoning University of Technology, 2016. | |
| 10 | 胡斐,赵治国,孙泽昌. 混合动力城市客车整车控制系统的开发[J]. 汽车工程, 2012, 36(4): 283-287. |
| Hu Fei, Zhao Zhi-guo, Sun Ze-chang. Development of vehicle control system for hybrid city bus[J]. Automotive Engineering, 2012, 36(4): 283-287. | |
| 11 | 席利贺. 增程式电动汽车能量管理策略优化及增程器控制系统研究[D]. 北京: 北京交通大学机械与电子控制工程学院, 2018. |
| Xi Li-he. Optimization of energy management strategy and research on control system of extender for EVs[D]. Beijing: School of Mechanical and Electronic Control Engineering, Beijing Jiaotong University, 2018. | |
| 12 | 朱敏晔, 赵治国, 萧蕴诗. 基于MPC555的HEV控制系统开发[J]. 华东交通大学学报, 2007, 24(4): 101-103. |
| Zhu Min-ye, Zhao Zhi-guo, Xiao Yun-shi. The application of RTW in the development of HEV control system based on MPC555[J]. Journal of East China Jiaotong University, 2007, 24(4): 101-103. | |
| 13 | 刘永恒. 纯电动客车整车控制器硬件在环仿真测试及标定系统开发[D]. 长春: 吉林大学仪器科学与电气工程学院, 2014. |
| Liu Yong-heng. Development of hardware in the loop simulation test and calibration system for complete vehicle controller of pure electric bus[D]. Changchun: College of Instrument Science and Electrical Engineering, Jilin University, 2014. |
| [1] | Shun YANG,Yuan⁃de JIANG,Jian WU,Hai⁃zhen LIU. Autonomous driving policy learning based on deep reinforcement learning and multi⁃type sensor data [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(4): 1026-1033. |
|
||