Journal of Jilin University(Engineering and Technology Edition) ›› 2023, Vol. 53 ›› Issue (11): 3221-3228.doi: 10.13229/j.cnki.jdxbgxb.20220976
Previous Articles Next Articles
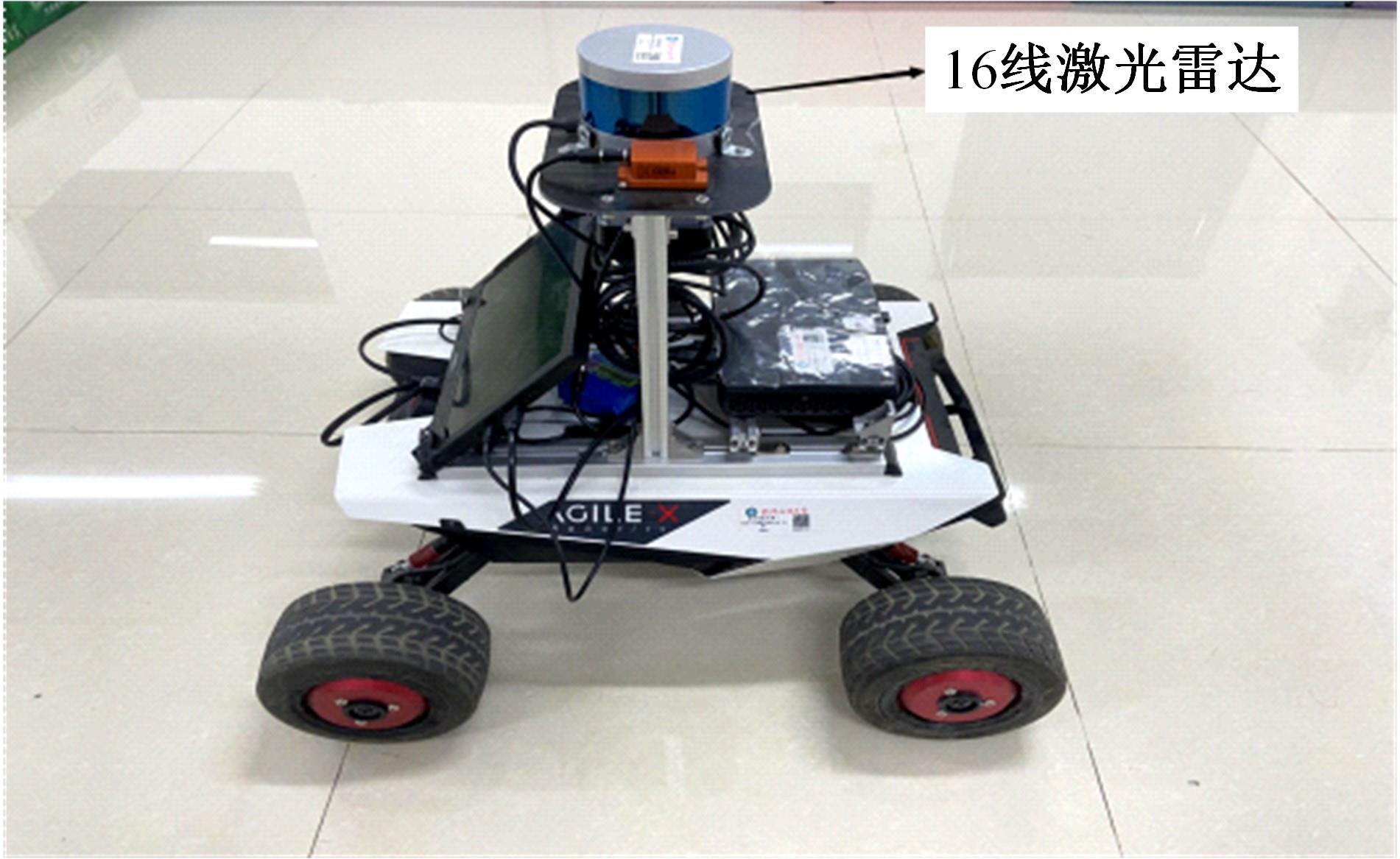
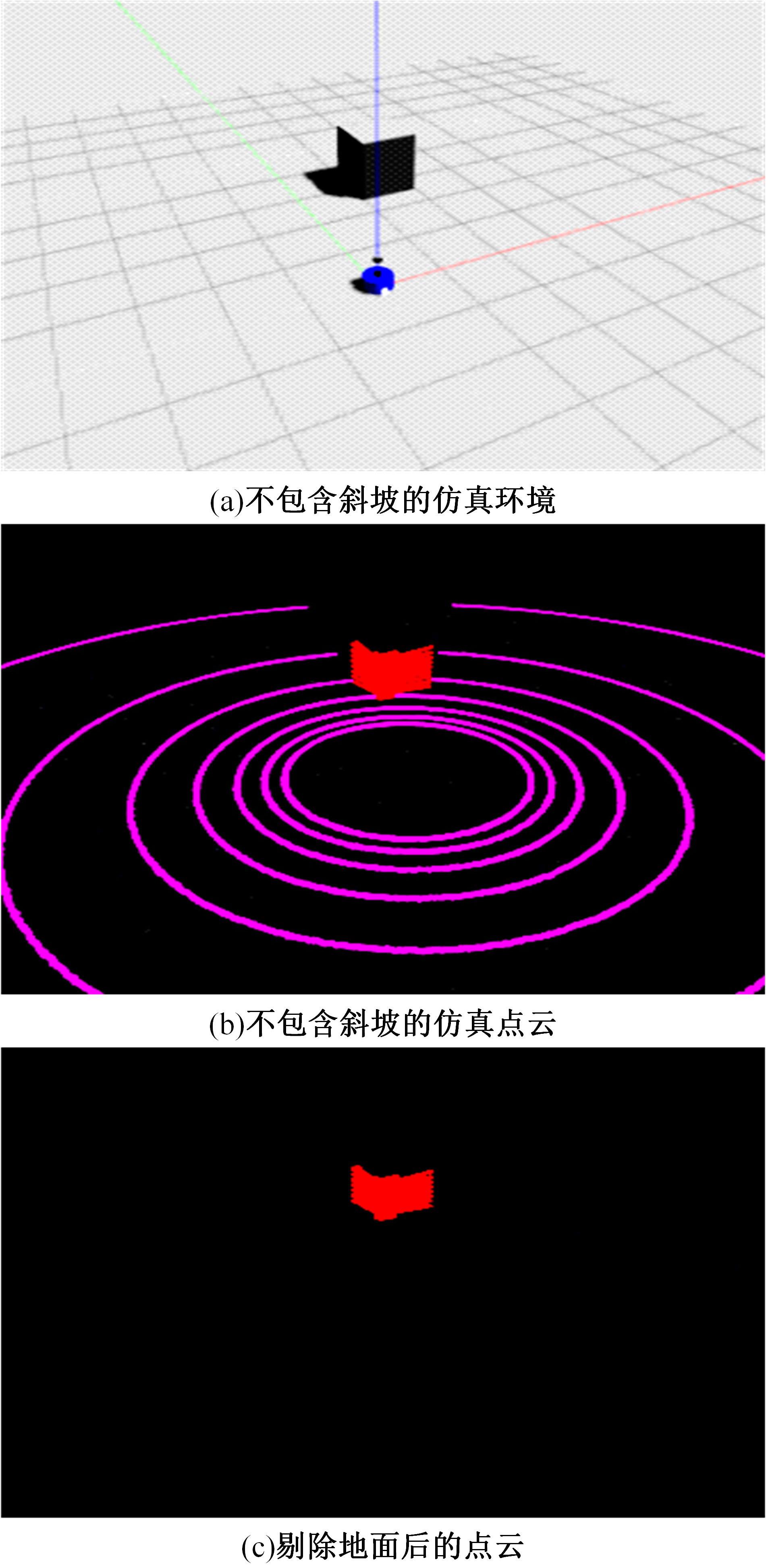
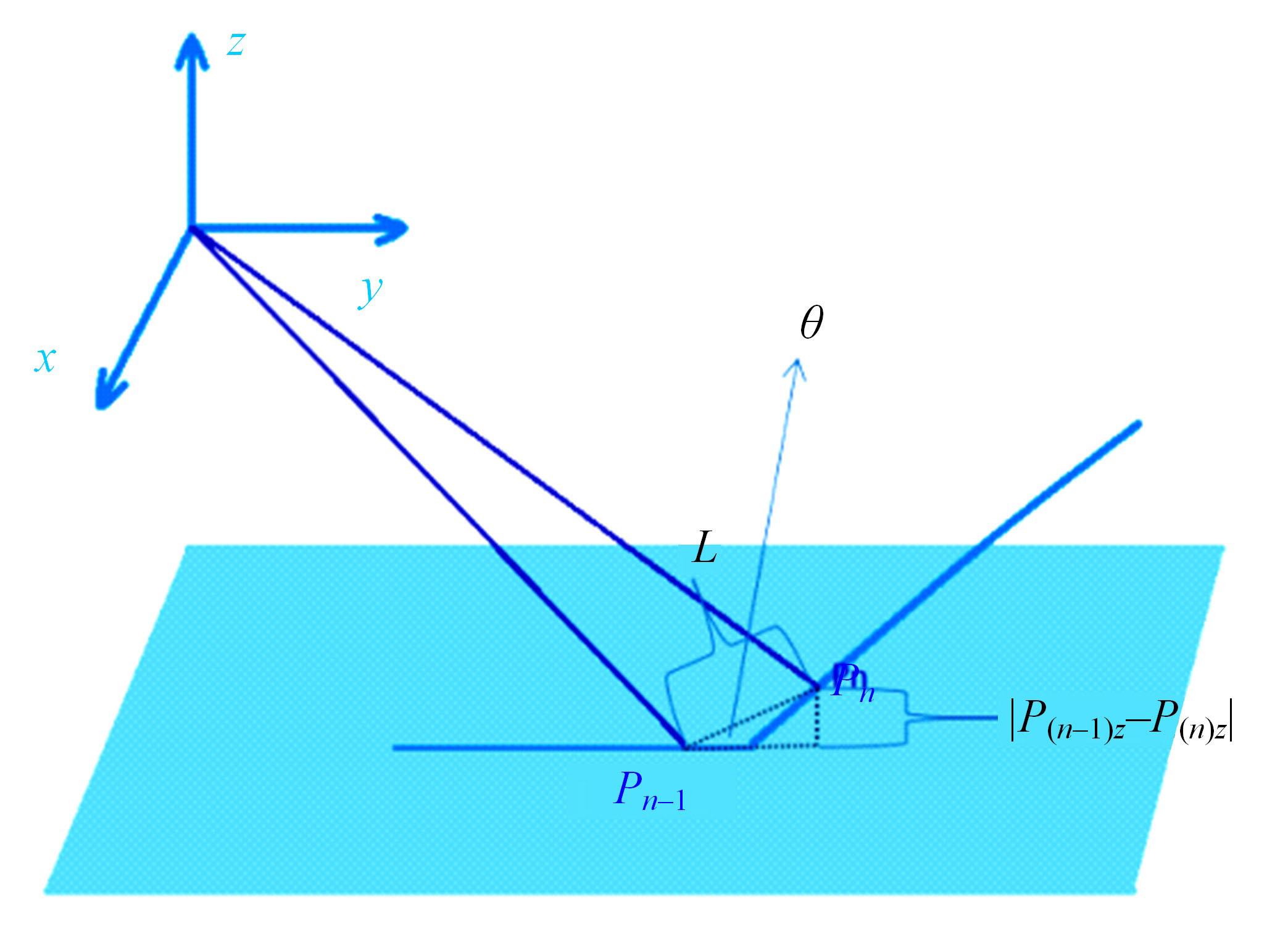
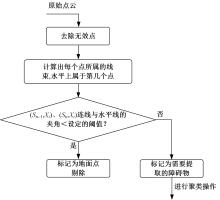
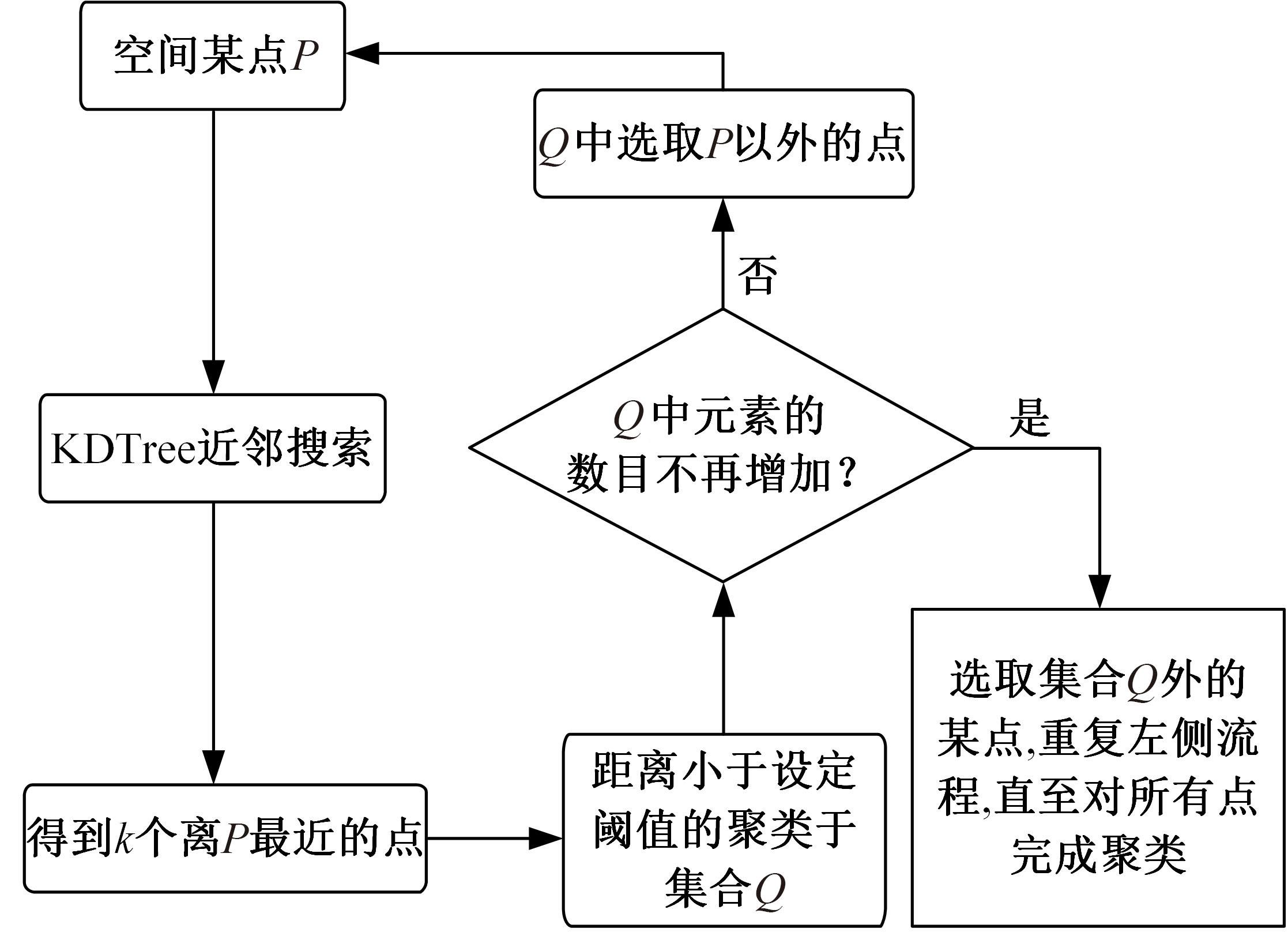
Detection and processing algorithm of slope point cloud in obstacle detection
Lin JIANG1,2( ),Li YANG1,Wen-jun ZHANG3,Qiong-yu ZHANG3,Yan-xia WU3
),Li YANG1,Wen-jun ZHANG3,Qiong-yu ZHANG3,Yan-xia WU3
- 1.Key Laboratory of Metallurgical Equipment and Control Technology,Ministry of Education,Wuhan University of Science and Technology,Wuhan 430081,China
2.Institute of Robotics and Intelligent Systems,Wuhan University of Science and Technology,Wuhan 430081,China
3.Leador Spatial Information Technology Co. ,Ltd. ,Wuhan 430073,China
CLC Number:
- TP391.9
















| 1 | 王金强, 黄航, 郅朋, 等. 自动驾驶发展与关键技术综述[J]. 电子技术应用, 2019, 45(6): 28-36. |
| Wang Jin-qiang, Huang Hang, Zhi Peng, et al. Overview of autonomous driving development and key technologies[J]. Applications of Electronics, 2019,45(6): 28-36. | |
| 2 | Xiang Y, Yang X Q, Yang W W, et al. Localization and mapping algorithm for the indoor mobile robot based on lidar[J]. IOP Conference Series Materials Science and Engineering, 2020, 831(1): 012021. |
| 3 | Atiyah A N, Adzhar N, Jaini N I. An overview: onpath planning optimization criteria and mobile robot navigation[J]. Journal of Physics: Conference Series, 2021, 1988: 012036. |
| 4 | 孔德明, 段呈新, 巴特·古森斯, 等. 基于车载16线激光雷达的障碍物检测方法[J]. 计量学报, 2021, 42(7): 846-852. |
| Kong De-ming, Duan Cheng-xin, Goossens Butter, et al. Obstacle detection method based on vehicle-borne 16-line lidar[J]. Journal of Metrology, 2021, 42(7): 846-852. | |
| 5 | 邓淇天. 基于激光雷达和视觉传感器融合的障碍物识别技术研究[D]. 南京: 东南大学仪器科学与工程学院, 2019. |
| Deng Qi-tian. Research on obstacle recognition technology based on fusion of lidar and vision sensor[D]. Nanjing: School of Instrument Science and Engineering, Southeast University, 2019. | |
| 6 | 赵夫群, 马玉, 戴翀. 基于改进随机抽样一致的点云分割算法[J]. 科学技术与工程, 2021, 21(22): 9455-9460. |
| Zhao Fu-qun, Ma Yu, Dai Chong. Point cloud segmentation algorithm based on improved RANSAC[J]. Science, Technology and Engineering, 2021, 21(22): 9455-9460. | |
| 7 | Zermas D, Izzat I, Papanikolopoulos N. Fast segmentation of 3D point clouds: a paradigm on lidar data for autonomous vehicle applications[C]∥IEEE International Conference on Robotics and Automation, Singapore, 2017: 79-86. |
| 8 | Wen M Y, Cho S, Chae J, et al. Range image-based density-based spatial clustering of applicationwith noise clustering method of three-dimensional point clouds[J]. International Journal of Advanced Robotic Systems, 2018, 15(2): 18762302. |
| 9 | Liu S X, Liu X D. Research on density-based k-means clustering algorithm[J]. Journal of Physics: Conference Series, 2021, 2137: 012071. |
| 10 | 孔栋, 王晓原, 刘亚奇, 等. 基于车载32线激光雷达点云的车辆目标识别算法[J]. 科学技术与工程, 2018, 18(5): 81-85. |
| Kong Dong, Wang Xiao-yuan, Liu Ya-qi, et al. Vehicle target recognition algorithm based on 32-line lidar point cloud[J]. Science, Technology and Engineering, 2018,18(5): 81-85. | |
| 11 | Schnabel R, Wahl R, Klein R. Eifficient RANSAC for point cloud shapedetection[J]. Computer Graphics Forum, 2007, 26(2): 214-226. |
| 12 | 范晶晶, 王力, 褚文博, 等. 基于KDTree树和欧式聚类的越野环境下行人识别的研究[J]. 汽车工程, 2019, 41(12): 1410-1415. |
| Fan Jing-jing, Wang Li, Chu Wen-bo, et al. Research on pedestrian recognition in off-road environment based on KDTree tree and European clustering[J]. Automotive Engineering, 2019, 41(12): 1410-1415. | |
| 13 | 王育坚, 廉腾飞, 吴明明, 等. 基于八叉树与KD树索引的点云配准方法[J]. 测绘工程, 2017, 26(8): 35-40. |
| Wang Yu-jian, Lian Teng-fei, Wu Ming-ming, et al. Point cloud registration method based on Octree and KD tree index[J]. Mapping Engineering, 26(8): 35-40. | |
| 14 | 杨帆. 基于B+树存储的AABB包围盒碰撞检测算法[J]. 计算机科学, 2021, 48(): 331-333. |
| Yang Fan. Collision detection algorithm of AABB bounding box based on B-tree storage[J]. Computer Science, 2021, 48(Sup.1): 331-333. | |
| 15 | 王晓洁, 周元峰, 潘晓, 等. 一种鲁棒的三维点云骨架提取方法[J]. 中国科学: 信息科学, 2017, 47(7): 832-845. |
| Wang Xiao-jie, Zhou Yuan-feng, Pan Xiao, et al. A robust method for 3D point cloud skeleton extraction[J]. Chinese Science: Information Science, 2017, 47(7): 832-845. |
| [1] | Xin-xin SHI,Jia-cai HUANG,Fang-zheng GAO. Measuring noise rejection of motion control system based on fractional BICO filter [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(5): 1873-1878. |
| [2] | Chang-fu ZONG,Long WEN,Lei HE. Object detection based on Euclidean clustering algorithm with 3D laser scanner [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(1): 107-113. |
| [3] | WANG Xin-zhu, LI Jun, LI Hong-jian, SHANG Bing-xu. -Obstacle detection based on 3D laser scanner and range image for intelligent vehicle [J]. 吉林大学学报(工学版), 2016, 46(2): 360-365. |
|