



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
液压驱动双足机器人运动系统的设计及实现
[王海燕, 李贻斌 , 宁龙霄]
, 宁龙霄]
, 宁龙霄]
|
|


王海燕(1981),女,博士研究生.研究方向:双足机器人,机器人智能控制.
提出了一种具有负重能力的8自由度液压驱动双足机器人运动系统。与具有相同负重能力的电驱动双足机器人相比,该机器人体积小、负重能力强、动态性好。由于机器人在空载的情况下,质量主要集中在腿部,提出了一种机器人动态步行时,对质量分布没有限制的机器人侧向平面内保持动态平衡的控制方法,克服了传统倒立摆模型要求忽略机器人腿部质量这一约束,扩大了其适用范围。在多体动力学仿真软件ADAMS环境下对仿真模型进行负重仿真试验和物理样机的空载试验,验证了该液压驱动双足机器人运动系统的有效性。
The hydraulic actuated motion system of a biped robot, which has 8 degrees of freedom, with payload capacity is proposed. Comparing with the motor driving robots with the same payload capacity, the robot developed in this research has the advantages of smaller volume and better dynamic characteristics. For that the primary mass is concentrated on the legs when the robot is idle load, a dynamic balance control method in the coronal plane is proposed. Unlike the inverted pendulum model, this control method has no constraint on the mass distribution of the biped robot, which enlarged the application range. The effectiveness of this hydraulic actuated motion system of the biped robot is demonstrated by simulation experiment on Automatic Dynamic Analysis of Mechanical System (ADAMS) and physical prototype idle load experiments.
机器人领域中的双足动态步行研究,不仅具有重要的学术意义,而且有现实的应用价值[ 1]。目前,双足机器人动态步行控制方法主要包含两部分:基于前馈控制的步行模式离线生成和基于零力矩点(Zero moment point,ZMP)反馈控制的在线调整[ 2],即将双足机器人简化为三维倒立摆模型[ 3],根据指定质心的目标运动,计算所需要的ZMP,通过踝关节力矩来稳定机器人的平衡或姿态[ 4, 5],或者通过改变落脚点来实现机器人稳定步行[ 6]。
目前,与仿人机器人类似,绝大多数具有负重能力的双足机器人都是采用伺服电机配合相应的谐波减速齿轮输出所需的关节驱动力矩[ 7]。通常,具有负重能力的双足机器人每条腿设有6个主动自由度,髋关节和踝关节采用多自由度的正交关节设计。如日本丰田公司推出的“i-foot”[ 8];韩国科学技术院研制的“HUBO Fx-1”[ 9];我国上海交通大学研制的“载人双足步行椅”[ 10];日本千叶工业大学的双足步行机器人“Core”等。鉴于液压驱动器具有功率/质量比大、动态性好、结构紧凑等优点,波士顿动力公司率先研制出高性能的液压驱动仿生机器人,先后推出了液压驱动四足机器人“BigDog”[ 11]和液压驱动双足仿生机器人“Petman”[ 12]。两者均表现出很好的动态性能,有力地促进了液压驱动机器人的发展。
本文提出了一种采用线性伺服液压缸驱动的具有负重能力的双足机器人运功系统。根据液压驱动双足机器人的运动特性,对机器人腿部自由度设置进行了简化,提出了8自由度(每条腿4个主动自由度)的液压驱动双足机器人运动系统。与相同负重能力的电驱动双足机器人相比,该机器人体积、质量均比较小,负重能力强,动态性好。本文提出的双足机器人运动系统空载时,机器人质量主要集中在腿部,克服了传统倒立摆模型要求机器人腿的质量相对于本体可以忽略这一约束,扩大了其适用范围。
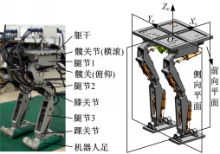
液压驱动双足机器人运动系统的机械结构部分由机器人本体和液压驱动系统构成。目前几乎所有的仿人机器人腿部都选择了6个自由度的构形方式,其分配方式为髋关节3个自由度,膝关节1个自由度,踝关节2个自由度。为了实现稳定行走,避免奇异点,控制机器人的重心高度,6自由度下肢构形的仿人机器人普遍采用屈膝前进方式[ 13]。本文提出的液压驱动双足机器人运动系统也采用屈膝前进的方式,根据液压驱动双足机器人的运动特性,本文对机器人腿部结构进行了简化,提出了每条腿4个主动自由度的液压驱动双足机器人运动系统,如图1所示,机器人躯干用于安装控制器及负重,没有设置自由度。详细参数如表1所示。
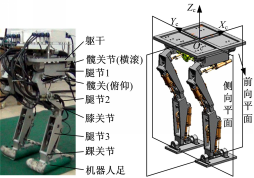 | 图1 液压驱动双足机器人样机Fig.1 Prototype of the hydraulic actuated biped robot |
| 表1 液压驱动双足机器人规格 Table 1 Specifications of the hydraulic actuated biped robot |
1.1.1 髋关节自由度设置
机器人髋关节若设置旋转自由度,结构参见文献[ 14],则其旋转自由度的驱动器可采用液压伺服马达或者摆动油缸。此时,机器人的负重能力不仅受限于线性液压伺服油缸所能提供的最大输出力,同时还需要考虑在机器人倾倒时,支撑腿上的液压马达/摆动油缸的输出轴所能承受的最大剪切力。而本文提出的液压驱动双足机器人运动系统可以前进、后退和侧向运动,两腿的差速运动可使机器人按照一定的转弯半径转弯。因此机器人髋关节没有设置旋转自由度,而仅设置了横滚和俯仰2个主动自由度。这种构形方式降低了设计制造成本,减轻了机器人本体重量,一定程度地增加了机器人的负重能力。
1.1.2 踝关节自由度设置
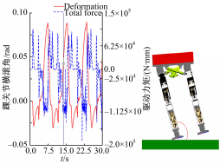
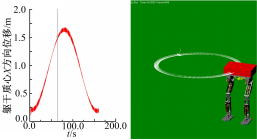
双足机器人有静态步行和动态步行两种步行方式。在静态步行中,机器人的质心在地面上的投影始终不能超越支撑多边形的范围;而在动态步行中,质心的投影在某些时刻可以越离支撑多边形。在ADAMS仿真环境下,液压驱动双足机器人负重165 kg静态步行时,单步迈步周期为1 s;质心侧向最大偏移量:左侧140 mm,右侧166 mm(机器人左、右腿腿节1结构不同,静态步行时,侧向偏移量差别比较大);此时,左脚踝关节横滚角的变化范围为[-0.0283,0.0882]rad;而左脚踝关节力矩峰值可达180 N·m,如图2所示。动态步行时,单步迈步周期0.4 s;质心侧向最大偏移量;左侧15 mm,右侧15.5 mm;此时,左脚踝关节横滚角的变化范围为[-0.0012,0.0422] rad;左脚踝关节力矩峰值可达187.92 N·m。由于液压驱动双足机器人动态步行时,机器人踝关节横滚角的变化范围较小,而维持机器人侧向稳定所需的力矩却很大,若踝关节横滚自由度设置为主动所需成本很高;设置为被动不能满足要求。而且,机器人踝关节的横滚角可以通过足底缓冲装置的弹性变形或者躯干的横滚运动进行补偿。因此,从经济性和实用性两方面考虑,本文提出的液压驱动双足机器人运动系统踝关节只设置了俯仰自由度,没有设置横滚自由度。
 | 图2 踝关节横滚角与驱动力矩关系示意图Fig.2 Sketch map for the relationship between the roll angle and the driving torque of the ankle joint |
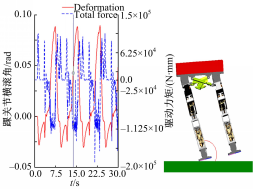
由于在ADAMS环境中创建足底缓冲装置的过程比较复杂,因此,在仿真模型中踝关节横滚自由度没有完全锁死,而是添加了弹性模量为106 (N·mm)/rad的扭矩弹簧和阻尼系数为106 (N·mm·s)/rad的旋转阻尼器。以踝关节横滚角代替足底缓冲装置的弹性变形量。
1.1.3 液压驱动系统
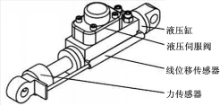
双足机器人运动系统的液压驱动系统包括室内固定液压站、液压油管、阀板、一体化线性液压伺服油缸。其中,一体化线性液压伺服油缸主要由液压缸、液压伺服阀、线位移传感器和力传感器4部分组成,如图3所示。
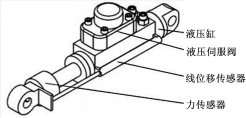 | 图3 一体化线性液压伺服油缸示意图Fig.3 Sketch map for the linear hydraulic servo cylinder |
1.1.4 机器人运动范围
增加驱动髋关节横滚运动的液压缸行程,需要增加机器人的宽度,或者增加第一腿节的长度。综合考虑到油缸的互换性和经济性及机器人结构的美观、实用,液压缸行程的设计值为180~240 mm。
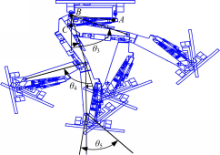
如图4所示,当驱动腿节2俯仰运动的液压缸与腿节1连接轴A的位置确定时,机器人髋关节俯仰运动的转动轴B与驱动腿节2俯仰运动的活塞杆连接轴C之间的距离越小,液压缸有效行程范围内推动机器人髋关节俯仰运动的范围越大,即髋关节俯仰角θ3的取值范围越大,B与C之间的距离越小,驱动腿节2俯仰运动的液压缸与驱动腿节3俯仰运动的液压缸越容易发生干涉。在避免干涉的情况下,机器人髋关节俯仰角θ3的取值范围为13.7091°~67.4158°,同理可得,膝关节俯仰角θ4和踝关节俯仰角θ5的取值范围分别为-12.8061°~-84.8861°和-8.7925°~42.369°。
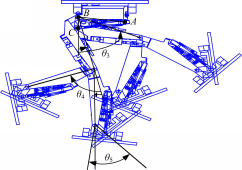 | 图4 双足机器人各腿节运动范围示意图Fig.4 Sketch map for joints range of motion |
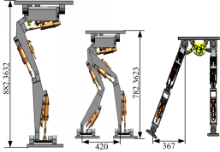
当机器人各关节俯仰角的范围已确定时,增加机器人腿节2和3的长度,机器人的运动范围随之增加。但是,由于机器人静止站立时其质心不能超过机器人足支撑的多边形,因此,增加机器人腿节2和3的长度,机器人的最大站立高度显著增加;机器人的长度增加量较小,即机器人的运动范围(理论运动空间)与机器人最大站立高度相对应。机器人所能达到的实际运动范围取决于环境和机器人的控制策略。机器人下蹲距离增加,机器人摆动腿向前迈步能力增强,向后迈步能力减弱。本文提出的液压驱动双足机器人运动系统由最大站立高度下蹲100 mm时,向前迈步能力与向后迈步能力相当,前向最大迈步距离约为420 mm,侧向最大迈步距离为367 mm,如图5所示。
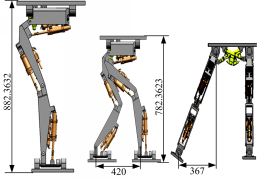 | 图5 液压驱动双足机器人运动范围示意图Fig.5 Sketch map for the range of motion of the biped robot |
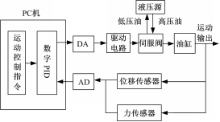
机器人控制系统由研华PCI-1713、PCI-1724U、驱动电路、检测电路等构成,如图6所示。关节运动采用线位移传感器间接测量,并在各关节设有力传感器,以便实现柔顺控制。
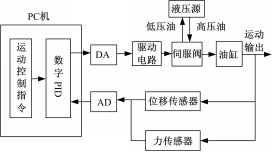 | 图6 液压伺服控制系统的基本结构Fig.6 Basic structure of the hydraulic servo control system |
机器人对地运动方向与支撑足相对于地面的运动方向相反,机器人步态规划的实质是生成机器人双足相对于骨盆中心的运动轨迹[ 15]。本文以机器人躯干上表面几何中心O c为基坐标原点,建立躯干固定坐标系如图1所示。Z c与躯干垂直,X c指向机器人前进方向,机器人前向平面为Z cO cX c平面,侧向平面为Z cO cY c平面。
倒立摆模型和ZMP稳定判据相结合,在双足机器人动态步行控制领域得到了广泛应用。倒立摆的直立摆动过程与机器人的步行过程相对应,即将双足机器人的腿与倒立摆的杆相对应,将双足机器人踝关节的力矩驱动看作是倒立摆的基地关节驱动[ 16]。鉴于倒立摆的特性,该模型只适用于腿部质量和惯量都比较小的情况。本文提出了一种适用范围广,易调节的机器人动态步行侧向平面内保持动态平衡的控制方法(在运动过程中躯干质心加速度时刻在发生变化,故该种方法称为动态平衡法)。包括:①对机器人各部分质量没有限制的双足机器人动步态生成方法;②通过实时检测机器人躯干横滚角,计算摆动腿实际抬高高度,调节机器人质心侧向平面的最大移动距离(间接调整机器人质心侧向平面运动的位移和加速度),保持机器人侧向平面动态平衡的调节机制。
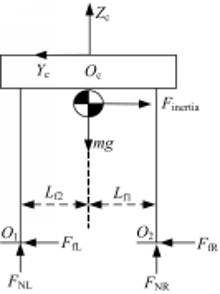
当机器人支撑腿相对于躯干向左加速运动时,如果地面可以提供足够大的摩擦力,则机器人质心相对于地面向右加速运动,如图7所示(图中, FNL、 FNR分别为机器人左足、右足受到的正压力; FfL、 FfR分别为机器人左足、右足受到的摩擦力)。如果加速度适当,机器人左足作用在地面上的正压力减小为零。此时,左腿离地,机器人不会侧向倾倒。同理,当支撑腿相对于机器人躯干向右加速度运动时,质心相对于地面向左运动。若保持机器人侧向平面的动态平衡,需满足下列两个基本条件: ①适当的初始加速度,保证机器人足可以顺利抬起;如果侧向加速度过大,则机器人会向支撑腿一侧倾倒;如果侧向加速度过小,则机器人则会向摆动腿一侧倾倒;②在运动过程中,侧向平面内由惯性力产生的侧倾力矩和由重力产生的回复力矩相对于平衡点O1(即ZMP点,质心向右运动平衡点为O1,质心向左运动平衡点为O2)的合力矩为零。
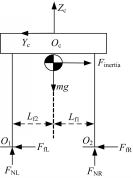 | 图7 机器人侧向平面受力示意图Fig.7 Sketch map for the mechanics analysis in the lateral plane |
机器人运动过程中,没有人为设置双足支撑阶段,两个迈步周期视为一个运动周期。第1个迈步周期,支撑腿相对于躯干向左加速运动,则mg(- L f1-y)+ 

如果机器人左右对称,则L f1=L f2=L f。L f的取值决定了机器人上ZMP点在Y c方向的理论位置。机器人质心的位置z c可以通过试验获得,本文用躯干上表面几何中心到地面的距离z代替。z c与z的差别可以通过L f调节弥补。
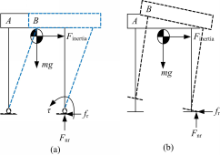
对于踝关节横滚自由度为主动的双足机器人,理想状态下,躯干在侧向平面内水平运动,即躯干横滚角为零(如图8(a)所示);而对于踝关节没有横滚自由度的双足机器人(如图8(b)所示),躯干横滚运动不可避免。因此,机器人摆动腿实际抬高高度H n应大于期望值H e。在踏步阶段,采用本文提出的动态平衡的控制方法,不需要计算平衡点O1或者O2是否在支撑足构成的凸多边形内,只需要根据机器人摆动腿的实际抬高高度H n与期望的抬高高度H e的差值调节L f值,保持机器人侧向平面的稳定。调节L f,使得H n大于H e,但尽可能接近kH e。其中,k>1,k与机器人的结构有关,与负重及机器人的运动特性无关。
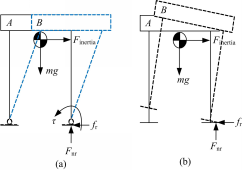 | 图8 机器人侧向平面躯干位姿示意图Fig.8 Sketch map for the trunk position and posture in the lateral plane |
本文提出的机器人侧向平面内保持动态平衡的控制方法适用的周期范围为0.3~0.5 s(与成年人正常的迈步周期相同),如果机器人的周期大于0.5 s,保证机器人侧向平面稳定运动,需要提供的质心初始加速度较大,L f值增加,保持机器人侧向平面稳定的L f取值范围较小,不易调节。
机器人运动时,Y c方向采用本文提出的保持机器人质心侧向平面内动态平衡的控制方法。当机器人前进、后退时,X c、Z c方向步态生成方法与山东大学机器人研究中心研制的“Scalf”[ 17]系列液压驱动四足机器人步态生成方法相同,即分别根据机器人X c、Z c方向步长、速度信息,采用三次多项式插值方法,生成相应摆动腿踝关节运动轨迹;支撑腿X c方向相对于躯干坐标系匀速直线运动,Z c方向抬高高度为零。机器人向右转弯时,左腿踝关节X c方向步长大于右腿踝关节X c方向步长。同理,向左转弯时,右腿踝关节X c方向步长大于左腿踝关节X c方向步长。
机器人模型在ADAMS仿真环境下进行负重仿真试验。令机器人负重160 kg(机器人物理样机负重能力受限于液压动力源输出液压油的最大油压及液压缸活塞杆的强度。ADAMS仿真模型不受此限制。本文提出的液压驱动双足机器人运动系统,物理样机试验时采用的负载重量最大为80 kg,但理论计算允许的最大负重约200 kg,因此,本文在ADAMS仿真环境下,令机器人负重160 kg)。
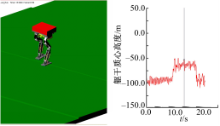
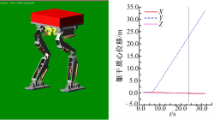
Y c方向采用本文提出的保持机器人质心侧向平面内“动态平衡”的控制方法,X c方向采用传统的阻抗控制,机器人表现出良好的运动特性。较小的地面起伏(20 mm台阶)对机器人的运动不产生影响,如图9所示,机器人周期0.4 s,上台阶后机器人正常向前运动,下台阶后机器人仍然正常继续向前运动。当机器人前向运动时,机器人步长400 mm(达到了设计步长),周期0.3 s时,前进速度可达1.32 m/s,如图10所示。
 | 图9 机器人负重上下台阶运动仿真Fig.9 Simulation result for climbing stairs with load |
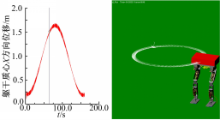
由于机器人没有设置旋转自由度,机器人转弯通过双腿X c方向差速运动来实现。当迈步周期为0.4 s,双腿速度差40 mm时,机器人转弯半径大约是其宽度的1.5倍,如图11所示。
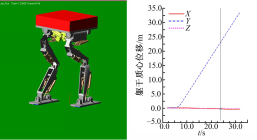
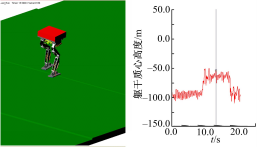
液压驱动双足机器人运动系统的机械本体部分(包括关节驱动伺服液压缸)总质量约40 kg,机器人单腿的质量约为14 kg。显然,在不负重的情况下,本文提出的液压驱动双足机器人运动系统不符合倒立摆模型前提假设。但是,按照本文提出的机器人侧向平面内保持“动态平衡”的控制方法,X c、Z c方向仅采用位置控制,液压驱动双足机器人运动系统即可完成前进(见图12)、后退(见图13)、转弯等功能性动作。
设计制造了具有负重能力的液压驱动双足机器人运动系统,其动态步行周期范围为0.3~0.5 s。在ADAMS仿真环境下,该机器人运动系统动态行走,前向运动最大步幅达400 mm(达到了机器人的最大设计步长),最大行走速度1.32 m/s。本文提出的机器人侧向平面内保持动态平衡的控制方法适用范围广、易调节。仿真试验和物理样机试验验证了其正确性和有效性。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|