
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于有限状态自动机的绿通车辆驾驶室避让控制
[李寿涛1  , 马用学
, 马用学1 , 郭鹏程1 , 张浩2 ]
, 马用学]
|
|


作者简介:李寿涛(1975-),男,副教授.研究方向:智能机械及机器人多智能体行为协调与控制;汽车系统动力学与控制.E-mail:list@jlu.edu.cn
在高速公路绿通车道检测过程中,为了避免射线对驾驶员身体造成伤害,需要对车辆的驾驶室进行避让。本文提出了一种基于有限状态自动机的绿通车辆驾驶室避让控制方法。首先在对车辆通过绿通车道时的状态进行分析的基础上,建立了车辆驾驶室避让的自动状态机模型;然后根据该模型编制了相应的控制程序,对该状态机模型进行了仿真验证和考核;最后对绿通车辆大量的实测数据进行分析。结果表明:基于有限状态自动机的驾驶室避让控制方法能够准确有效地实现驾驶室避让控制,有效地剔除非车辆通行所导致的误动作。
In order to avoid the radiation injury to the drivers in the detection process of the free toll lane in highway, the vehicle cab should be stepped aside; such vehicle is called green-vehicle. A new avoidance control method of green-vehicle cab is proposed using the finite state machine. First, on the basis of the mechanism of vehicle cab avoidance, the finite state machine model of green-vehicle cab avoidance is established. The program is developed based on the model for simulation and evaluation. Simulations are carried out to access and validate the finite state machine model. A large amount of real data measured from experiment is analyzed. The results prove that the control method can accurately and effectively achieve cab avoidance, and eliminate the misoperation caused by non green-vehicles.
传统的检测高速公路绿色通道车辆[ 1]的方法主要包括:感官法、吨位法和内窥镜检测法等[ 2],存在检查速度慢、人员工作强度大、准确性低的缺点,且无法提供直接违规证据;最新的检测方法为无损检测法[ 3],主要采用雷达检测技术[ 4]、射线透视技术[ 5]。雷达检测技术由于不能够穿透金属,因此在应用中具有一定的局限性,而射线的穿透力很强,因此利用射线透视技术来对绿色车辆进行检查成为趋势[ 6]。
目前正逐渐把先进的射线透视技术运用到高速公路绿色通道检测系统中,然而射线透视技术使用的射线源会对人体造成伤害,因此在对绿通车辆进行检测时需要对驾驶室进行避让,保证司乘人员的安全。由于射线透视技术在绿色通道检测方面具有广阔的应用前景,因此研究一个能准确实现驾驶室避让控制的系统具有非常重要的意义。然而,目前国内大多采用的驾驶室避让方式为被动避让,该避让方式不能够很好地解决驾驶室避让。为此急需提出一种新的避让控制方法,不但能够实现驾驶室的主动避让控制,而且还能提高避让准确率。
本文提出了一种将有限状态自动机(Finite state machine,FSM)[ 7, 8, 9, 10, 11, 12]运用于绿通车辆驾驶室避让控制中新方法,首先当绿通车辆通过检查车道时,对四组光电开关传感器组的时序进行分析,然后建立绿通车辆驾驶室避让的有限状态机模型,进而根据该模型编制相应的控制程序,最后通过实际测试证明了该方法的有效性。
目前高速公路绿色通道检测系统将逐渐采用先进的射线透视技术对过往车辆进行检测,射线透视技术主要使用的射线源是X射线、γ射线以及Co-60。在利用透视法对车辆进行检测的过程中,若是射线直射到司乘人员的身体上,无论射线透视法中使用哪种射线源,都会对人体产生一定的辐射。通过对现场大量的车辆进行测试可知,车辆通过检测区域的过程中,车速的变化规律大致成“U型”曲线带,而且在此过程中车辆的加速度也是不均衡的,因此通过简单的时间与速度的关系来设置延时以获得车辆驾驶室、车辆货箱与射线机发射器的相对位置是行不通的。因此在车辆变速行驶通过检测区域的情况下,如何获得车辆驾驶室、车辆货箱与射线机发射器的相对位置,成为实现车辆驾驶室避让的关键技术。
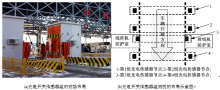
在车辆通过检测区域时,为避免对司乘人员的辐射损伤,需建立驾驶室避让智能控制系统。该控制系统主要由驾驶室避让控制器和光电开关传感器组等组成。其中,控制器为核心部分,主要负责获取车辆驾驶室、车辆货箱与射线机发射器的相对位置信息,给上位机发送采集图像和结束采集图像的指令,控制X射线和光栅的开启和关闭。光电开关传感器组主要负责感知绿通车辆在检测区域的位置状态信息,并将所有的状态信息实时地传送给避让控制器。在绿色通道中,光电开关传感器组的硬件布局如图1所示,其中图1(a)为光电开关传感器组30°侧视的布局示意图,图1(b)为光电开关传感器组俯视的布局示意图。
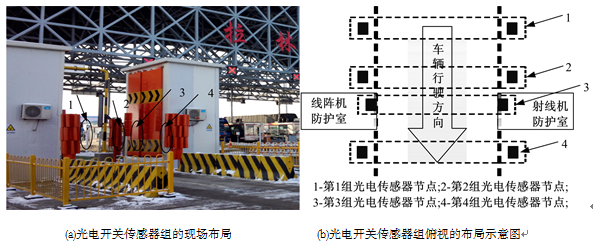 | 图1 光电开关传感器组的硬件布局示意图Fig.1 Hardware layout diagram of the group of photoelectric switch sensor |
在高速公路绿色通道现场,对大量绿通车辆的尺寸进行了测量,并对测量数据进行了统计和分析。最后对绿通车辆的车型进行了新定义,从绿通车辆驾驶室与货箱之间间隙长短的角度来进行划分,将绿通车辆分为“长车”和“短车”两种类型。“长车”所挂接的货箱与驾驶室具有70~200 cm的间距,而“短车”货箱与驾驶室之间的间距则很小,不会超过30 cm。“长车”和“短车”的驾驶室前部到货箱前部的距离差异很大,这就决定了在这两种类型被检车辆通过检测区域的过程中,射线发生器开启的逻辑不同。因此确定绿通车辆的类型是准确实现驾驶室避让的前提。
在绿通车辆进入检测区域后,将依次通过4组传感器节点。首先定义绿通车辆驾驶室前端从第3组传感器节点行驶到第4组传感器节点的平均速度为 V2;货厢尾部从第2组传感器节点行驶到第3组传感器节点的平均速度为 V3。当驾驶室前部到达第2组传感器节点时,第2组传感器节点将获得一个上跳沿信号;此时通过第1组传感器节点的输出电平信号对绿通车辆类型进行初步判断,若输出为低电平信号,则判定“长车”;若输出为高电平信号,则判定为“短车”。
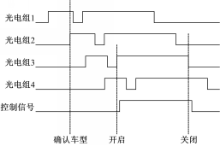
若判定为“长车”,则需要继续判断出货厢前端和尾部分别与第3组传感器节点的相对位置。当车辆驾驶室前部到达第4组传感器节点时,第4组传感器节点输出上跳沿信号;然后继续等到车辆货厢前端到达第3组传感器节点时,第3组传感器节点输出上跳沿信号,此时启动延时;当延时0.5/ V2 s后,开启射线发生器以及向上位机发送开始采集图像指令;当车辆货厢尾部到达第3组传感器节点时,第3组传感器节点输出下跳沿信号,此时启动延时;当延时0.5/ V3 s后,关闭射线发生器以及向上位机发送结束采集图像指令。“长车”通过检测区域时,4组传感器节点和控制信号的时序如图2所示。
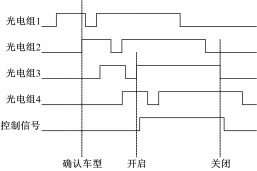 | 图2 “长车”的时序图Fig.2 Timing diagram of “Long Vehicle” |
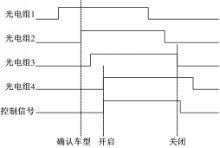
若判定绿通车辆类型为“短车”,则需要判断出车辆货厢前端与第4组传感器节点的相对位置和车辆货厢尾部与第3组传感器节点的相对位置。当车辆驾驶室前部到达第4组传感器节点时,第4组传感器节点获得一个上跳沿信号;此时开启射线发生器以及向上位机发送开始采集图像指令;当车辆货厢尾部到达第3组传感器节点时,第3组传感器节点获得一个下跳沿信号,此时启动延时;当延时0.5/ V3 s后,关闭射线发生器以及向上位机发送结束采集图像指令。“短车”通过检测区域时,4组传感器节点和控制信号的时序如图3所示。
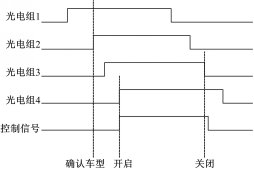 | 图3 “短车”的时序图Fig.3 Timing diagram of “Short Vehicle” |
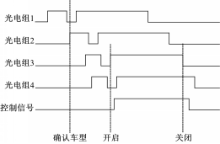
在测试的过程中发现了有些异常的绿通车辆(此后简称为“异常长车”),其驾驶室的长度大于第1组传感器节点与第2组传感器节点之间的距离。在区分绿通车辆类型时会把这种“异常长车”误判为“短车”,从而导致驾驶室避让控制逻辑的混乱,进而导致驾驶室避让控制的失败。因此首次将绿通车辆类型判定为“短车”后,还需要对绿通车辆类型作进一步的判定。
在首次将车辆类型判定为“短车”后,且绿通车辆在碰到第4组传感器节点之前,若第1组传感器节点先后产生过下跳沿和上跳沿信号,则初次的车型判定是错误的,否则是正确的。若是再次确认绿通车辆类型是“短车”,则继续保持“短车”的控制逻辑;若再次确认绿通车辆类型是“长车”,则判定车辆为“异常长车”,在此后的控制逻辑需要按照“长车”的控制逻辑进行。当“异常长车”通过检测区域时,4组传感器节点和控制信号的时序如图4所示。
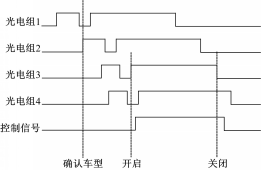 | 图4 “异常长车”的时序图Fig.4 Timing diagram of “Special Long Vehicle” |
另外,对于整个绿通车辆驾驶室避让控制系统,还需要处理外界因素对系统的干扰问题,尤其是过往行人对检测系统造成的影响。当过往行人误入检测区域时,一方面可能射线对过往人员造成伤害,另一方面当对随后的绿通车辆进行检测时可能导致控制逻辑混乱。为了防止此类事件的发生,首先必须从管理的角度出发,禁止过往行人通过绿通检测车道;另外,更需要从驾驶室避让控制系统软件设计来排除这类干扰。
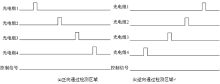
过往行人误入检测车道的方式主要有正向和反向通过检测区域的情况。当行人正向和逆向通过检测区域时,4组传感器节点和控制信号的时序分别如图5(a)(b)所示。由于行人与车辆通过检测区域的时序具有差异性,因此可以通过软件设计来排除行人对系统造成的干扰。
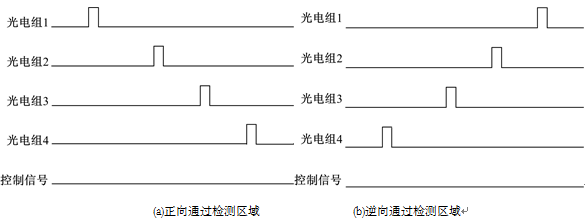 | 图5 行人通过检测区域的时序图Fig.5 Timing diagram of the pedestrian passing by the detection area |
根据车辆驾驶室避让机制,可以建立该机制与状态自动机之间的映射关系,进而建立基于有限状态机的车辆驾驶室避让控制。车辆驾驶室避让状态机,在每次状态转换后的后继状态都是唯一的,故该状态机为确定的有限状态自动机。由于触发车辆驾驶室避让状态机的一种状态转换到另外一个状态的输入量是不一样的,因此每个状态都要获取4组传感器的状态信息,当输入量符合触发条件时,状态机将切换到下一个状态。
通过对绿通车辆驾驶室避让控制原理的分析,将避让流程分为10个状态。每一个状态都是避让流程一个阶段的行为总和的反映,也是驾驶室避让控制成功的保证。状态机的所有状态及状态与状态之间的转换关系如下。
(1) S0表示车辆未到达检测区域的状态。处于该状态期间,若第二组传感器节点输出上跳沿信号,则状态转换为 S1,否则保持原状态不变。
(2) S1表示车辆驾驶室到达第二组传感器节点位置的状态。处于该状态时,若第一组传感器节点输出为低电平信号,则状态改变为 S2;若第一组传感器节点输出为高电平信号,则状态转换为 S5。
(3) S2表示车辆首次被确认为“长车”的状态。处于该状态期间,若第四组传感器节点输出上跳沿信号,则状态转换为 S3,否则保持原状态不变。
(4) S3表示“长车”驾驶室到达第四组传感器节点位置的状态。处于该状态期间,若第三组传感器节点输出上调沿信号,则立即启动定时器,且状态转换为 S4,否则保持原状态不变。
(5) S4表示开启光栅前的延时状态。若延时时间到,则状态转换为 S7,否则保持原状态不变。
(6) S5表示车辆被判定为“短车”的状态。处于该状态期间,若第四组传感器节点输出上跳沿信号,则状态转换为 S6,否则保持原状态不变。
(7) S6表示“短车”驾驶室到达第四组传感器节点位置的状态。从到达 S5状态起至到达 S6状态之前,若第二组传感器节点先后产生了下跳沿和上跳沿信号,则状态转换为 S3,否则状态转换为 S7。
(8) S7表示开启光栅的状态。处于该状态期间,若第三组传感器节点输出下跳沿信号,则启动延时定时器,且状态转换为 S8,否则保持原状态不变。
(9) S8表示关闭光栅前的延时状态。处于该状态期间,若关闭光栅前的延时时间到,则状态转换为 S9,否则保持原状态不变。
驾驶室避让控制有限状态机中的每一个事件都代表了一系列相关动作执行的结果,这里根据驾驶室避让控制流程设计了20个事件。对状态机在状态转换过程中出现的事件作如下定义:
(1) I01表示车辆到达第二组传感器节点位置时,第二组传感器节点输出上跳沿; I00表示车辆还没有到达第二组传感器节点位置时的状态转移事件。
(2) I11表示第一次判定车辆车型为“长车”; I12表示第一次判定车辆车型为“短车”; I10表示未进行车辆判定。
(3) I21表示“长车”驾驶室到达第四组传感器节点位置时,第四组传感器节点输出上跳沿; I20表示“长车”驾驶室还没有到达第四组传感器节点位置。
(4) I31表示“长车”货箱到达第三组传感器节点位置时,第三组传感器节点输出上跳沿; I30表示“长车”货箱没有到达第三组传感器节点位置。
(5) I41表示延时开启光栅的时间到; I40表示延时开启光栅的时间未到。
(6) I51表示车辆驾驶室到达第四组传感器节点位置时,第四组传感器节点输出上跳沿的状态转移事件; I50表示车辆驾驶室没有到达第四组传感器节点位置。
(7) I61表示车辆驾驶室到达第四组传感器节点位置之前,第二组传感器节点先后产生了下跳沿和上跳沿信号,则再次确认车辆车型为“短车”的状态转移事件; I62表示车辆驾驶室到达第四组传感器节点位置之前,第二组传感器节点没有先后产生下跳沿信号和上跳沿信号,则再次确认车辆车型为“长车”的状态转移事件; I60表示车辆驾驶室还没有到达第四组传感器节点位置。
(8) I71表示车辆货箱尾部到达第三组传感器节点位置时,第三组传感器节点输出下跳沿的状态转移事件; I70表示车辆货箱尾部没有到达第三组传感器节点位置。
(9) I81表示延时关闭光栅的时间到; I80表示延时关闭光栅的时间未到。
基于上述分析,可得绿通车辆驾驶室避让有限状态自动机 M=( Q, Σ, δ, q0, F),其中状态集合为 Q={ S0、 S1、 S2、 S3、 S4、 S5、 S6、 S7、 S8、 S9};输入集合为 Σ={ I00、 I01、 I10、 I11、 I12、 I20、 I21、 I30、 I31、 I40、 I41、 I50、 I51、 I60、 I61、 I62、 I70、 I71、 I80、 I81};初始状态为 S0;接收状态集为 F={ S9};状态转移函数为:
δ 

δ 

δ 

δ 

δ 

δ 

车辆驾驶室避让状态机的状态转移图如图6所示。当对绿通车辆货物进行检测时,绿通车辆将依次通过4组传感器节点,在此过程中将依次触发不同的事件,进而触发状态的转换。由状态转移图可知,若绿通车辆为“长车”,那么状态机将依次触发事件{ I01、 I11、 I21、 I31、 I41、 I71、 I81},状态机的状态会从初始状态 S0开始,依次经历状态{ S0、 S1、 S2、 S3、 S4、 S7、 S8、 S9};若绿通车辆为“短车”,那么状态机将依次触发事件{ I01、 I11、 I51、 I61、 I71、 I81},状态机的状态会从初始状态 S0开始,依次得到状态{ S0、 S1、 S5、 S6、 S7、 S8、 S9};若绿通车辆为“异常长车”,那么状态机将依次触发事件{ I01、 I11、 I51、 I62、 I31、 I41、 I71、 I81},状态机的状态会从初始状态 S0开始,依次得到状态{ S0、 S1、 S5、 S6、 S3、 S4、 S7、 S8、 S9}。
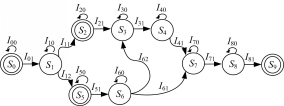 | 图6 状态转移图Fig.6 Diagram of state transition |
车辆驾驶室避让的状态转移图是驾驶室避让控制有限状态机模型设计的最后结果,也是编写控制程序的依据。在状态机模型中,事件触发引起状态机进行相应的处理,产生输出并向下一个状态转移,根据具体的输出和当前状态进入相应的状态转移函数入口进行处理,状态转移函数按照在状态机中的作用可分为正常转移函数和健壮性处理过程中的转移函数,每一个状态转移函数关联一次状态转移过程。
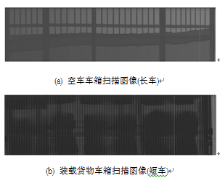
在对绿通车辆检测的整个过程中,若检测系统在整个扫描过程中只对车辆货箱部位进行扫描,则扫描图像中只会有货箱部分。因此绿通车辆的整个扫描图像中,若是只有车辆货箱部位,则说明成功地实现了车辆驾驶室避让。如图7所示为绿通车辆的扫描图像,其中图7(a)为一辆无装载货物的“长车”通过检测后获得的扫描图像,图7(b)为一辆装载有菠菜的“短车”通过检测后获得的扫描图像,其中图片的左侧为货箱前部。由图7可以看到货箱尾部的空白部分以及货箱内的轮廓,并且图片的左侧没有驾驶室被扫描的迹象。由此可知,可以通过绿通车辆的扫描图片来判定是否成功地实现驾驶室避让。
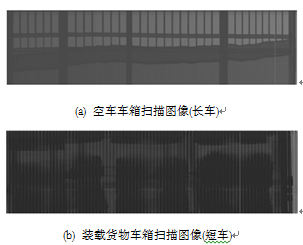 | 图7 车辆扫描图像Fig.7 Scanned images of vehicle |
通过使用绿通检测系统对车辆进行检测,能够获得大量检测数据,包括车辆的扫描图片、车辆类型及车辆车速等信息,然后对数据进行分析。在采集到的扫描图片中,对于图片上没有出现驾驶室或出现部分驾驶室的情况被认为驾驶室避让成功,否则被认为驾驶室避让失败。
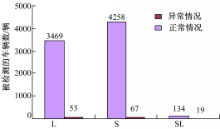
在实际的测试过程中,连续对8000辆绿通车辆进行了检测,并对所有的检测数据进行了统计。在统计的所有扫描图像中,虽然没有发现驾驶室或驾驶室后部被扫描的情况,但是扫描的图像中有些异常情况(对于没有出现大量空白或全是空白的图像被视为正常扫描,否则被认为异常扫描)。
将测试数据根据正常和异常扫描图像进行了统计,其结果如图8所示(图中:L表示“长车”,S表示“短车”,SL表示“异常长车”)。由统计图可知,在“长车”、“短车”和“异常长车”的扫描图像中,它们正常图像所占的比例依次为97.66%、98.45%和87.58%。
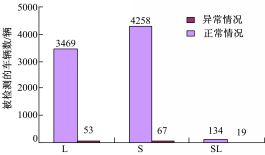 | 图8 扫描图像的统计图Fig.8 Statistics of the scanned images |
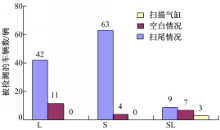
扫描图像异常情况是受多方面因素的影响导致的。由于车辆驶离检测区域时处于加速阶段,会使得扫描图片出现扫尾;另外由于驾驶室与货箱之间存在着一些物体,比如气缸和烟筒等,可能导致状态机不能正常工作。从而“长车”和“异常长车”的扫描图像中出现了空白图片或将气缸扫描等情况。对异常扫描图像进行分类统计,如图9所示。
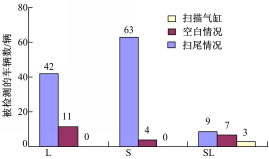 | 图9 异常扫描图像的统计图Fig.9 Statistics of unusual scanned images |
从实验结果可以看出,虽然扫描图像中出现了一些异常图像,但是所有扫描图像没有出现驾驶室或驾驶室后部被扫描的情况,因此驾驶室避让控制的准确率为100%。由此可知,基于有限状态自动机的驾驶室避让控制方法,能够准确得到货车驾驶室、货箱和射线发生器的相对位置,进而给上位机发送开启和结束采集图像的指令和控制射线的正确开启和关闭。
本文提出了一种基于有限状态自动机的绿通车辆驾驶室避让控制方法,该控制方法能够有效地获得车辆驾驶室、货箱与射线机发生器的相对位置信息,为实现驾驶室避让提供了一种灵活有效的控制方法。从实际测试的效果来看,采用有限状态自动机的机制能够准确有效地实现驾驶室避让。另外,还需要对车辆作进一步的研究,建立更为完善的驾驶室避让控制状态机,避免扫描异常的发生。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|