吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (12): 3646-3652.doi: 10.13229/j.cnki.jdxbgxb.20231215
周期性振荡抑制约束下长航时惯性导航三阶无静差阻尼算法
关博帆( ),李四海,付强文
),李四海,付强文
- 西北工业大学 自动化学院,西安 710129
Third order static error free damping algorithm for long endurance inertial navigation under periodic oscillation suppression constraints
Bo-fan GUAN(),Si-hai LI,Qiang-wen FU
- School of Automation,Northwestern Polytechnical University,Xi 'an 710129,China
摘要:
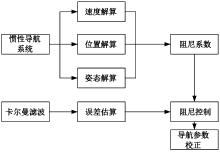
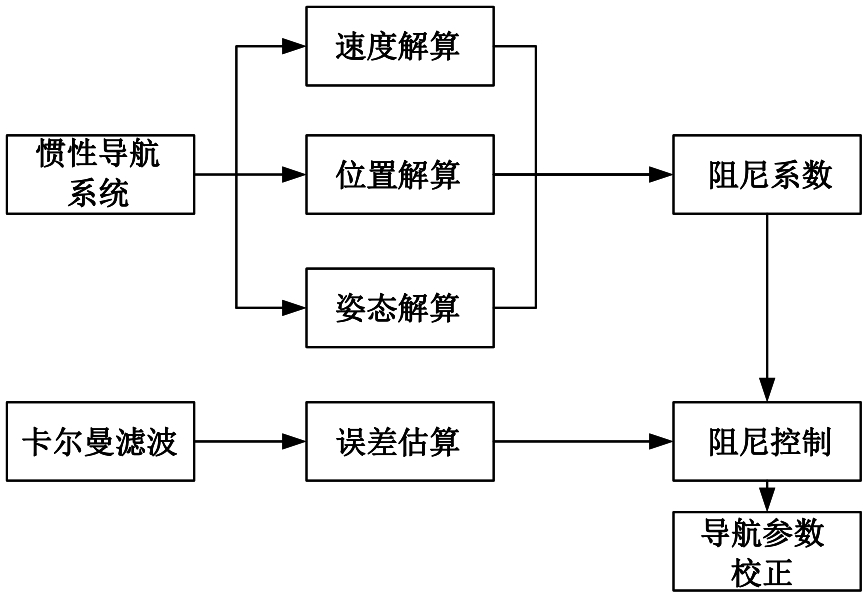
惯性导航系统在实际环境中会遇到各种干扰,如振动、温度变化和外界磁场等,且长时间运行下容易积累较大的误差,使导航系统的稳定性和精度较低。为此,本文研究一种周期性振荡抑制约束下长航时惯性导航三阶无静差阻尼算法。采用卡尔曼滤波估计周期性振荡误差,通过引入误差补偿机制,抑制周期性振荡误差,利用模糊控制实现阻尼控制,修正导航参数,完成惯性导航三阶无静差阻尼算法研究。通过实验验证表明:该算法应用下导航参数的误差都相对更小,且随着时间的推移,算法对误差的抑制效果逐渐增强,误差越来越小,位置误差降至0.15 m,速度误差降至0.10 m/s、姿态误差降至0.06°。该算法为长航时惯性导航系统的精度提高和稳定性增强提供了有效的解决方案,为航空航天领域以及机器人领域的导航系统提供了更精确、稳定的导航性能。
中图分类号:
- TP21.66
| 1 | 梁娜, 丁丹. SINS/GPS组合导航系统研究[J].计算机仿真, 2022, 39(12):34-37. |
| Liang Na, Ding Dan. Research of the SINS/GPS integrated navigation system[J]. Computer Simulation, 2022, 39 (12): 34-37. | |
| 2 | 郝诗文, 周召发, 张志利, 等.垂线偏差对惯导系统位置误差的影响分析[J].仪器仪表学报, 2023, 44(7):74-84. |
| Hao Shi-wen, Zhou Zhao-fa, Zhang Zhi-li, et al. Analysis of the inertial navigation system positioning error caused by deflection of the vertical[J]. Chinese Journal of Scientific Instrument, 2023, 44 (7): 74-84. | |
| 3 | 李冬毅, 覃方君, 黄春福, 等.基于LM算法的惯导自主阻尼算法[J]. 传感器与微系统, 2023, 42(6):112-115. |
| Li Dong-yi, Qin Fang-jun, Huang Chun-fu, et al. Inertial navigation autonomous damping algorithm based on LM algorithm[J]. Transducer and Microsystem Technologies, 2023, 42(6): 112-115. | |
| 4 | 刘潺, 吴文启, 冯国虎, 等.法向量位置模型下的水下长航时惯性导航阻尼算法[J]. 中国惯性技术学报, 2021,29(6): 709-716. |
| Liu Chan, Wu Wen-qi, Feng Guo-hu, et al. Damping algorithm for long-endurance underwater INS based on n-vector model[J]. Journal of Chinese Inertial Technology, 2021, 29(6): 709-716. | |
| 5 | 朱九鹏, 李安, 覃方君, 等. 基于Kalman滤波的惯导系统重力扰动阻尼抑制方法[J]. 火力与指挥控制, 2022, 47(9): 37-42. |
| Zhu Jiu-peng, Li An, Qin Fang-jun, et al. Damping suppression method for gravity disturbance based on kalman filter in inertial navigation system[J]. Fire Control & Command Control, 2022, 47(9): 37-42. | |
| 6 | 冯国虎, 吴文启, 曾观林. 基于虚拟圆球法向量位置模型的航海惯导全球容错阻尼算法[J].中国惯性技术学报, 2022, 30(5): 576-581, 588. |
| Feng Guo-hu, Wu Wen-qi, Zeng Guan-lin. Global fault tolerant damping method of marine inertial navigation based on virtual spherical n-vector model[J]. Journal of Chinese Inertial Technology, 2022,30(5): 576-581, 588. | |
| 7 | 常海林, 李洁, 潘常春, 等.基于优化算法的摩擦阻尼器参数设计新方法[J]. 工业建筑, 2023, 53(8):154-160. |
| Chang Hai-lin, Li Jie, Pan Chang-chun, et al. A new method for parameter optimization of friction dampers based on optimization algorithm[J]. Industrial Construction, 2023, 53(8): 154-160. | |
| 8 | 陈丰收, 吕述晖, 李安琪. 基于快速非支配排序遗传算法的阻尼器多目标优化布置[J]. 世界地震工程, 2023, 39(1): 109-117. |
| Chen Feng-shou, Shu-hui Lyu, Li An-qi. Multi-objective optimal arrangement of dampers based on nondominated sorting genetic algorithm-II[J]. World Earthquake Engineering, 2023, 39(1): 109-117. | |
| 9 | 袁彦红, 王北超, 范蕾懿, 等. 卫星姿控多推力器高速率阻尼算法及验证[J].航天控制, 2022, 40(5):15-21. |
| Yuan Yan-hong, Wang Bei-chao, Fan Lei-yi, et al. High-velocity damping algorithms and validation for multiple jets of a satellite[J]. Aerospace Control, 2022, 40(5): 15-21. | |
| 10 | 张香成, 徐宏辉, 赵军, 等. 基于改进遗传算法的磁流变阻尼器多目标空间优化布置[J]. 湖南大学学报:自然科学版, 2023, 50(5): 85-94. |
| Zhang Xiang-cheng, Xu Hong-hun, Zhao Jun, et al. Multi-objective spatial optimization arrangement of magnetorheological dampers based on improved genetic algorithm[J]. Journal of Hunan University (Natural Sciences), 2023, 50(5): 85-94. | |
| 11 | 吴迪, 王影, 华国武, 等. IPFC有源阻尼模型预测电流控制优化算法研究[J]. 电力电子技术, 2022, 56(4):7-11. |
| Wu Di, Wang Ying, Hua Guo-wu, et al. Research on optimal algorithm of active damping model predictive current control of IPFC[J]. Power Electronics, 2022, 56 (4): 7-11. | |
| 12 | 胡国良, 齐浩楠, 喻理梵, 等.基于遗传算法的混合流动式磁流变阻尼器优化设计[J].重庆交通大学学报:自然科学版, 2022, 41(5): 157-166. |
| Hu Guo-liang, Qi Hao-nan, Yu Li-fan, et al. Optimal design of hybrid fluid flow magnetorheological damper based on genetic algorithm[J]. Journal of Chongqing Jiaotong University(Natural Science), 2022, 41(5): 157-166. | |
| 13 | 李戈, 毛崎波, 吴彬. 基于遗传算法的电磁分流阻尼参数优化[J].噪声与振动控制, 2021, 41(3): 9-13, 50. |
| Li Ge, Mao Qi-bo, Wu Bin. Parameter optimization for electromagnetic shunt dampers based on genetic algorithm[J]. Noise and Vibration Control, 2021, 41(3): 9-13, 50. | |
| 14 | 焦浩鑫, 丁肇伟, 陈龙珠. 基于复阻尼模型水平剪切型结构的时域解析算法[J]. 地震工程学报, 2021, 43(3): 720-727. |
| Jiao Hao-xin, Ding Zhao-wei, Chen Long-zhu. A Time-domain analytical method for horizontal shear structures based on the complex damping model [J]. China Earthquake Engineering Journal, 2021, 43 (3): 720-727. | |
| 15 | 曾观林, 冯国虎. 水下SINS/DVL组合导航误差抑制综述[J].现代防御技术, 2023, 51(4): 25-35. |
| Zeng Guan-lin, Feng Guo-hu. Review on the error suppression of underwater SINS/DVL integrated navigation[J]. Modern Defence Technology, 2023, 51 (4): 25-35. | |
| 16 | 刘潺, 吴文启, 冯国虎, 等. 法向量位置模型下旋转调制惯导极区综合校正算法[J]. 中国惯性技术学报, 2023, 31(2): 107-113. |
| Liu Chan, Wu Wen-qi, Feng Guo-hu, et al. Comprehensive calibration algorithm for rotational inertial navigation system based on n-vector model in polar regions[J]. Journal of Chinese Inertial Technology, 2023, 31(2): 107-113. |
| [1] | 张泽, 段广仁. 新的捷联惯性导航划桨误差补偿算法[J]. 吉林大学学报(工学版), 2010, 40(05): 1460-1464. |
| [2] | 张荣辉1,王海玮2,贾宏光3,陈涛3,张跃3. 捷联式惯性导航系统初始对准扰动补偿控制算法[J]. 吉林大学学报(工学版), 2010, 40(03): 811-0815. |
| [3] | 张涛, 徐晓苏. 基于小波和人工智能的舰载捷联系统动基座对准[J]. 吉林大学学报(工学版), 2010, 40(02): 549-0553. |
|