Journal of Jilin University(Engineering and Technology Edition) ›› 2023, Vol. 53 ›› Issue (12): 3508-3517.doi: 10.13229/j.cnki.jdxbgxb.20220080
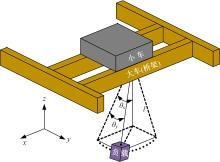
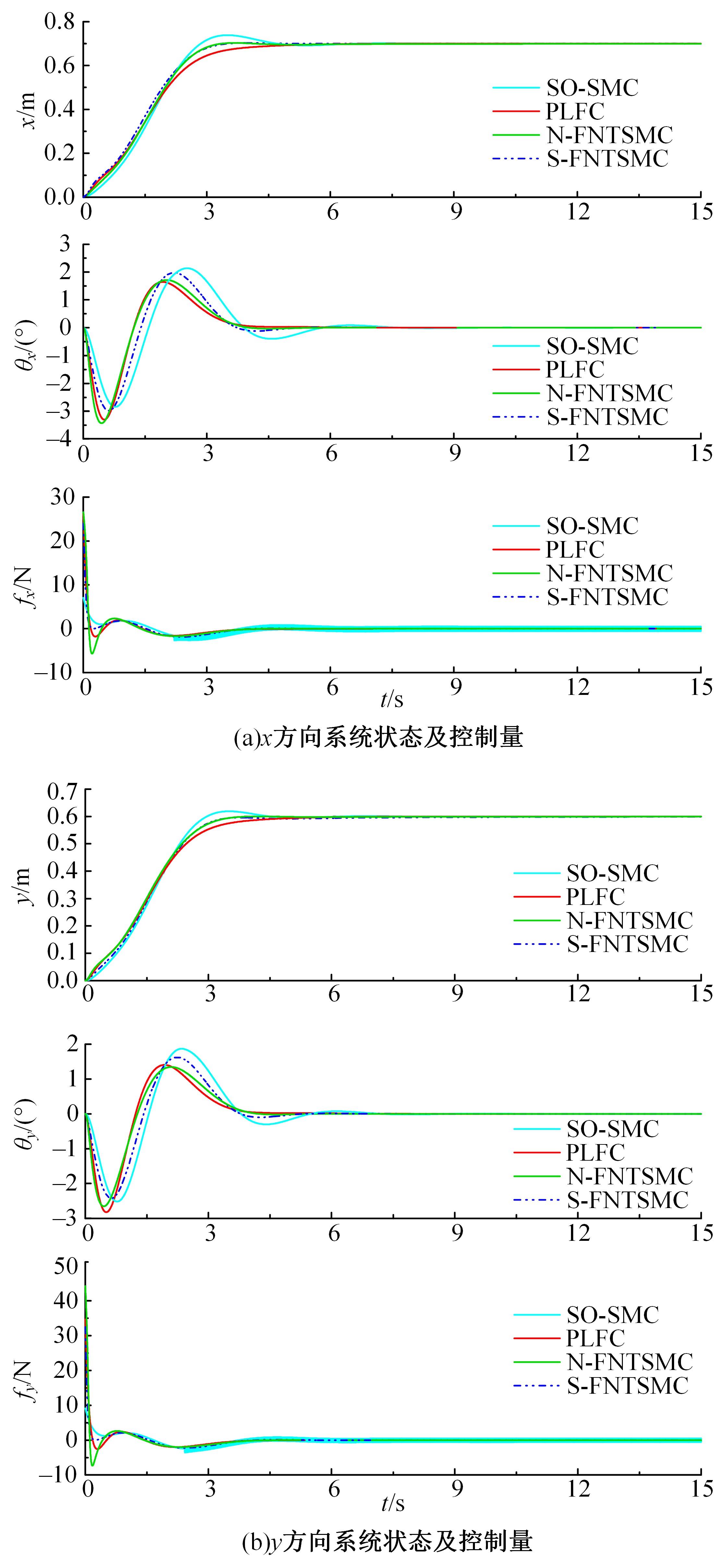
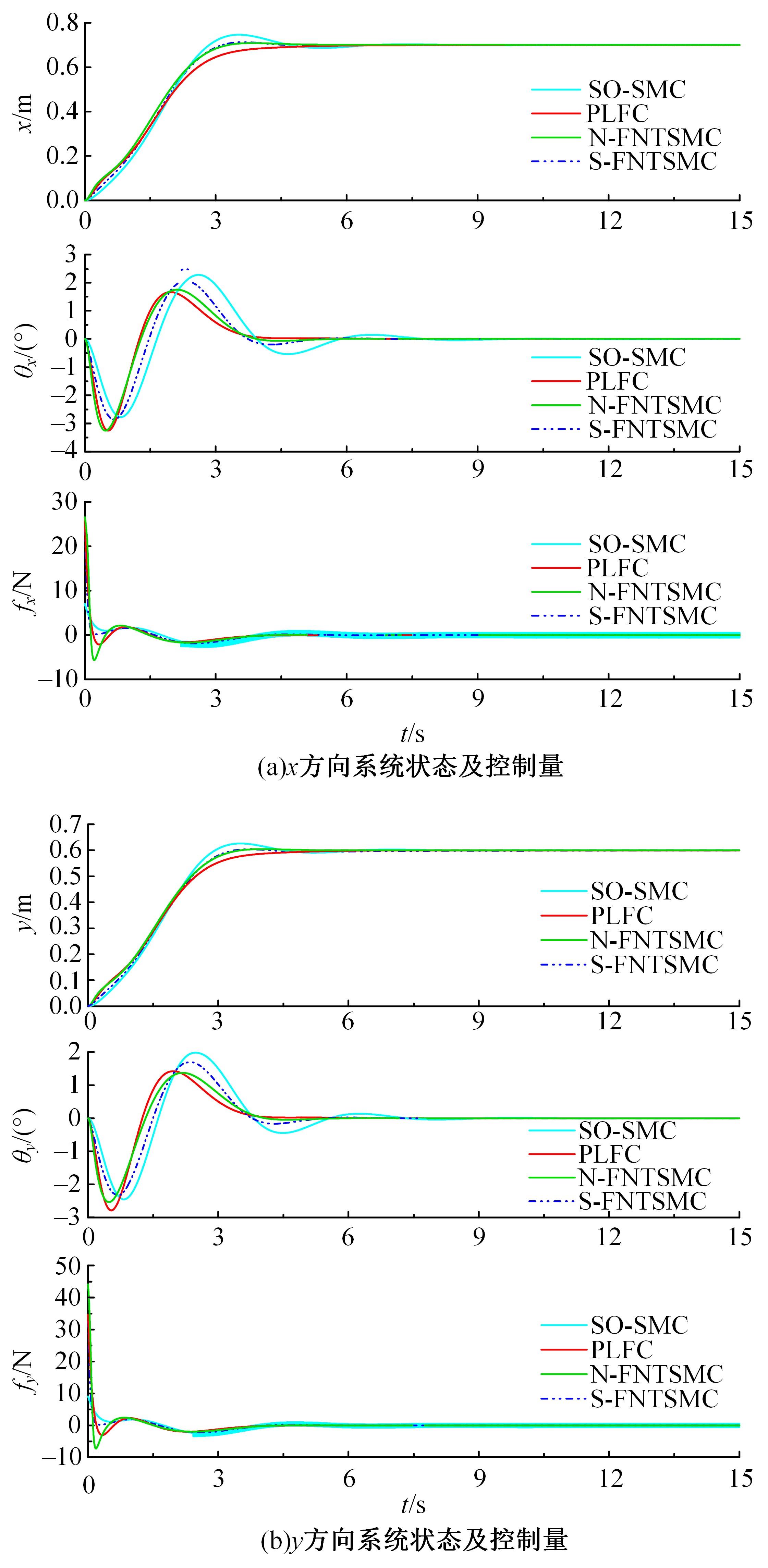
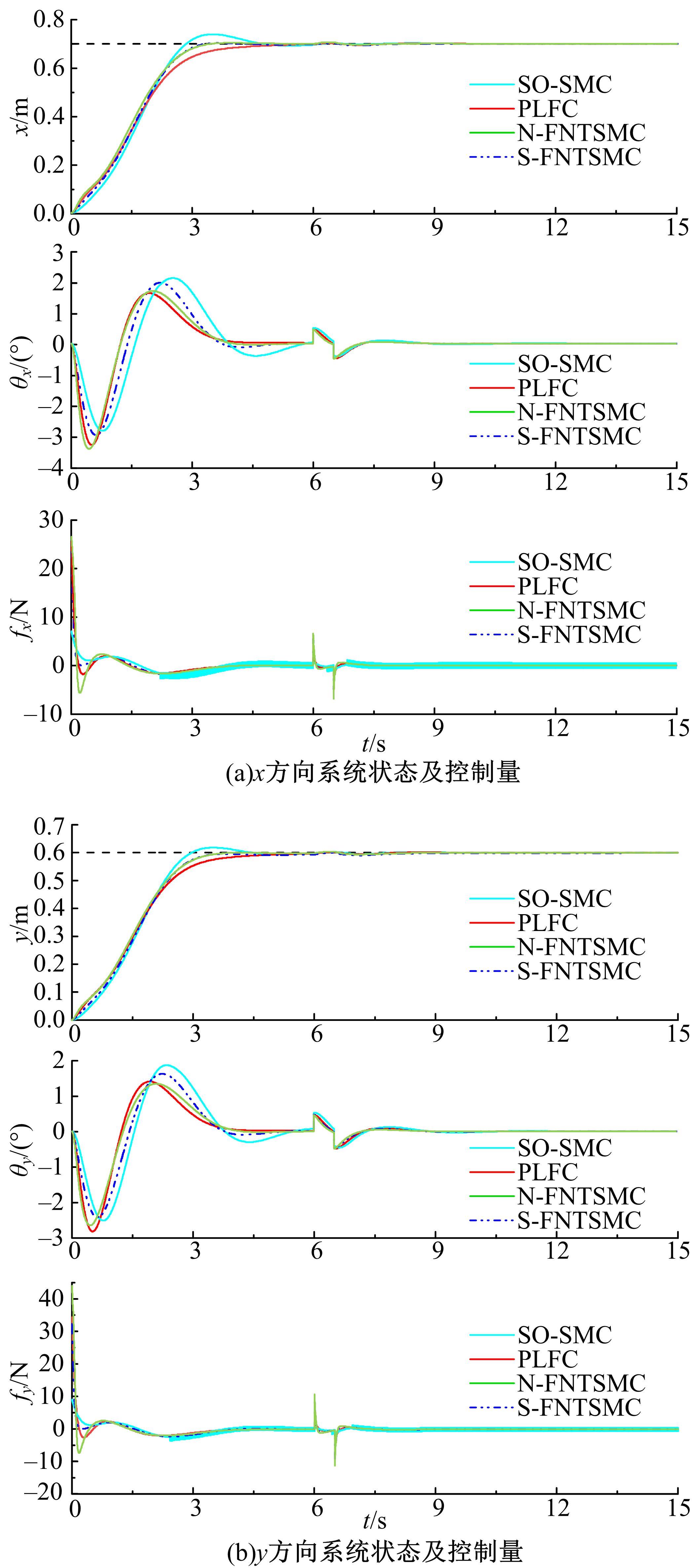
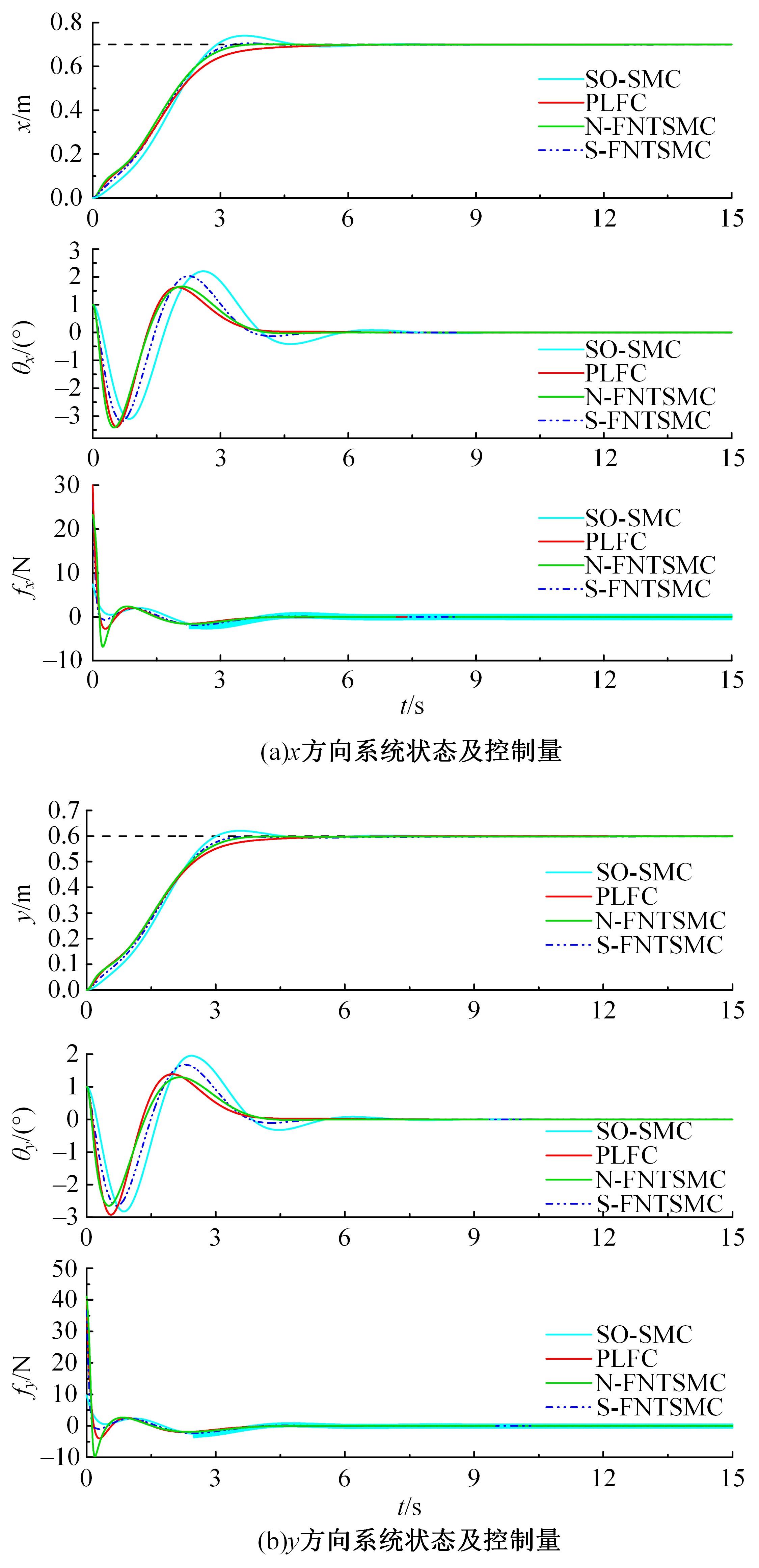
Payload swing control for 3D overhead crane based on fast non⁃singular terminal sliding mode
Shou-rui WANG1( ),Wu-yin JIN1(),Zhi-yuan RUI1,Xia ZHANG2
),Wu-yin JIN1(),Zhi-yuan RUI1,Xia ZHANG2
- 1.School of Mechanical and Electrical Engineering,Lanzhou University of Technology,Lanzhou 730050,China
2.College of Electrical Engineering,Longdong University,Qingyang 745000,China
CLC Number:
- TP273




| 1 | Zhang S, Zhu H, He X, et al. Passivity-based coupling control for underactuated three-dimensional overhead cranes[J]. ISA Transactions, 2022, 126: 352-360. |
| 2 | 何博, 方勇纯, 卢彪. 针对输入时滞的桥式起重机鲁棒控制[J]. 自动化学报, 2019, 45(6): 1065-1073. |
| He Bo, Fang Yong-chun, Lu Biao. Robust control for an overhead crane with input delay[J]. Acta Automatica Sinica, 2019, 45(6): 1065-1073. | |
| 3 | 孙宁, 方勇纯, 王鹏程, 等. 欠驱动三维桥式吊车系统自适应跟踪控制器设计[J]. 自动化学报, 2010, 36(9): 1287-1294. |
| Sun Ning, Fang Yong-chun, Wang Peng-cheng, et al. Adaptive trajectory tracking control of underactuated 3-dimensional overhead crane systems[J]. Acta Automatica Sinica, 2010, 36(9): 1287-1294. | |
| 4 | 孙宁, 方勇纯, 陈鹤. 欠驱动桥式吊车消摆跟踪控制[J]. 控制理论与应用, 2015, 32(3): 326-333. |
| Sun Ning, Fang Yong-chun, Chen He. Antiswing tracking control for underactuated bridge cranes[J]. Control Theory & Applications, 2015, 32(3): 326-333. | |
| 5 | Ramli L, Mohamed Z, Abdullahi A M, et al. Control strategies for crane systems: a comprehensive review[J]. Mechanical Systems and Signal Processing, 2017, 95: 1-23. |
| 6 | Jaafar H I, Mohamed Z, Ahmad M A, et al. Control of an underactuated double-pendulum overhead crane using improved model reference command shaping: design, simulation and experiment[J]. Mechanical Systems and Signal Processing, 2021, 151(1): No. 107358. |
| 7 | Xia X, Wu Z. Optimal motion planning for overhead cranes[J]. IET Control Theory & Applications, 2014, 8(17): 1833-1842. |
| 8 | Aguiar C, Leite D, Pereira D, et al. Nonlinear modeling and robust LMI fuzzy control of overhead crane systems[J]. Journal of the Franklin Institute, 2021, 358(2): 1376-1402. |
| 9 | Lu B, Fang Y, Sun N. Adaptive output-feedback control for dual overhead crane system with enhanced anti-swing performance[J]. IEEE Transactions on Control Systems Technology, 2020, 28(6): 2235-2248. |
| 10 | Zhang S, He X, Chen Q. Energy coupled-dissipation control for 3-dimensional overhead cranes[J]. Nonlinear Dynamics, 2020, 99(3): 2097-2107. |
| 11 | 刘金琨. 滑模变结构控制Matlab仿真: 基本理论与设计方法[M]. 北京: 清华大学出版社, 2015. |
| 12 | Gu X, Xu W. Moving sliding mode controller for overhead cranes suffering from matched and unmatched disturbances[J]. Transactions of the Institute of Measurement and Control, 2022, 44(1): 60-75. |
| 13 | Tuan L A, Kim J J, Lee S G, et al. Second-order sliding mode control of a 3D overhead crane with uncertain system parameters[J]. International Journal of Precision Engineering and Manufacturing, 2014, 15(5): 811-819. |
| 14 | Le V-A, Le H-X, Nguyen L, et al. An efficient adaptive hierarchical sliding mode control strategy using neural networks for 3D overhead cranes[J]. International Journal of Automation and Computing, 2019, 16(5): 614-627. |
| 15 | Anh L V, Hai L X, Thuan V D, et al. Designing an adaptive controller for 3D overhead cranes using hierarchical sliding mode and neural network[C]∥International Conference on System Science and Engineering, Taipei, China, 2018: No.18202192. |
| 16 | Park M S, Chwa D, Eom M. Adaptive sliding-mode antisway control of uncertain overhead cranes with high-speed hoisting motion[J]. IEEE Transactions on Fuzzy Systems, 2014, 22(5): 1262-1271. |
| 17 | Tuan L A, Lee S G, Nho L C, et al. Model reference adaptive sliding mode control for three dimensional overhead cranes[J]. International Journal of Precision Engineering & Manufacturing, 2013, 14(8): 1329-1338. |
| 18 | Tsai C C, Wu H L, Chuang K H. Intelligent sliding-mode motion control using fuzzy wavelet networks for automatic 3D overhead cranes[C]∥SICE Annual Conference, Akita, Japan, 2012: No. 3055903. |
| 19 | Zhang M, Zhang Y, Chen H, et al. Model-independent PD-SMC method with payload swing suppression for 3D overhead crane systems[J]. Mechanical Systems and Signal Processing, 2019, 129: 381-393. |
| 20 | Chwa D. Sliding mode control-based robust finite-time anti-sway tracking control of 3-D overhead cranes[J]. IEEE Transactions on Industrial Electronics, 2017, 64(8): 6775-6784. |
| 21 | Ouyang H, Hu J, Zhang G, et al. Sliding-mode-based trajectory tracking and load sway suppression control for double-pendulum overhead cranes[J]. IEEE Access, 2019, 7: 4371-4379. |
| 22 | Zhang M, Zhang Y, Cheng X. An enhanced coupling PD with sliding mode control method for underactuated double-pendulum overhead crane systems[J]. International Journal of Control, Automation and Systems, 2019, 17(6): 1579-1588. |
| 23 | Wang T, Tan N, Zhang X, et al. A time-varying sliding mode control method for distributed-mass double pendulum bridge crane with variable parameters[J]. IEEE Access, 2021, 9: 75981-75992. |
| 24 | Almutairi N B, Zribi M. Sliding mode control of a three-dimensional overhead crane[J]. Journal of Vibration & Control, 2009, 15(11): 1679-1730. |
| 25 | 刘洋, 井元伟, 刘晓平, 等. 非线性系统有限时间控制研究综述[J]. 控制理论与应用, 2020, 37(1): 1-12. |
| Liu Yang, Jing Yuan-wei, Liu Xiao-ping, et al. Survey on finite-time control for nonlinear systems[J]. Control Theory & Applications, 2020, 37(1): 1-12. | |
| 26 | 王伟, 赵健廷, 胡宽荣, 等. 基于快速非奇异终端滑模的机械臂轨迹跟踪方法[J].吉林大学学报: 工学版, 2020, 50(2): 464-471. |
| Wang Wei, Zhao Jian-ting, Hu Kuan-rong, et al. Trajectory tracking of robotic manipulators based on fast nonsingular terminal sliding mode[J]. Journal of Jilin University (Engineering and Technology Edition), 2020, 50(2): 464-471. | |
| 27 | Zhou M, Sun N, Chen H, et al. A novel sliding mode control method for underactuated overhead cranes[C]∥Chinese Automation Congress, Jinan, China, 2017: No. 17469598. |
| 28 | Wu X, He X. Partial feedback linearization control for 3-D underactuated overhead crane systems[J]. ISA Transactions, 2016, 65: 361-370. |
| [1] | Yao SUN,Yun-feng HU,Jie-min ZHOU,Huan CHENG,Ting QU,Jing-hua ZHAO,Hong CHEN. Moving horizon optimization control of SCR system based on hierarchical controller [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(1): 61-71. |
| [2] | Jin-wu GAO,Zhi-huan JIA,Xiang-yang WANG,Hao XING. Degradation trend prediction of proton exchange membrane fuel cell based on PSO⁃LSTM [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(9): 2192-2202. |
| [3] | Jin-wu GAO,Yi-lin WANG,Hua-yang LIU,Yi-da WANG. Decoupling control for proton exchange membrane fuel cell air supply system based on sliding mode observer [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(9): 2156-2167. |
| [4] | Ang LI,Hong-yuan YANG,Xiao-meng LEI,Kai-wen SONG,Cheng-hui QIAN. Closed-loop control of traveling attitude of hexapod robot based on equivalent connecting link model [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(7): 1696-1708. |
| [5] | Hang ZHU,Han-bo YU,Jia-hui LIANG,Hong-ze LI. Improved algorithm of UAV search based on electric field model and simulation analysis [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(12): 3029-3038. |
| [6] | Bin XIAN,Shi-jing ZHANG,Xiao-wei HAN,Jia-ming CAI,Ling WANG. Trajectory planning for unmanned aerial vehicle slung⁃payload aerial transportation system based on reinforcement learning [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2259-2267. |
| [7] | Fang XU,Jun-ming ZHANG,Yun-feng HU,Ting QU,Yi QU,Qi-fang LIU. Lateral and longitudinal coupling real⁃time predictive controller for intelligent vehicle path tracking [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2287-2294. |
| [8] | Guang-xin HAN,Ju-le ZHAO,Yun-feng HU. Moving horizon linear quadratic regulator control for ball and plate system with input constraints [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 1982-1989. |
| [9] | Shu-you YU,Huan CHANG,Ling-yu MENG,Yang GUO,Ting QU. Disturbance observer based moving horizon control for path following problems of wheeled mobile robots [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(3): 1097-1105. |
| [10] | Ai-guo WU,Jun-qing HAN,Na DONG. Adaptive sliding mode control based on ultra⁃local model for robotic manipulator [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1905-1912. |
| [11] | Wei WANG,Jian-ting ZHAO,Kuan-rong HU,Yong-cang GUO. Trajectory tracking of robotic manipulators based on fast nonsingular terminal sliding mode [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 464-471. |
| [12] | Fu LIU,Yi AN,Bo DONG,Yuan-chun LI. Decentralized energy guaranteed cost decentralized optimal control of reconfigurable robots based on ADP [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(1): 342-350. |
| [13] | Xing-tian QU,Xue-xu WANG,Hui-chao SUN,Kun ZHANG,Long-wei YAN,Hong-yi WANG. Fuzzy self⁃adaptive PID control for fused deposition modeling 3D printer heating system [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(1): 77-83. |
| [14] | Miao-miao MA,Jun-jun PAN,Xiang-jie LIU. Model predictive load frequency control of microgrid with electrical vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(5): 1644-1652. |
| [15] | Shu⁃you YU,Lei TAN,Wu⁃yang WANG,Hong CHEN. Control of active four wheel steering vehicle based ontriple⁃step method [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 934-942. |
|
||