Journal of Jilin University(Engineering and Technology Edition) ›› 2025, Vol. 55 ›› Issue (2): 709-721.doi: 10.13229/j.cnki.jdxbgxb.20230543
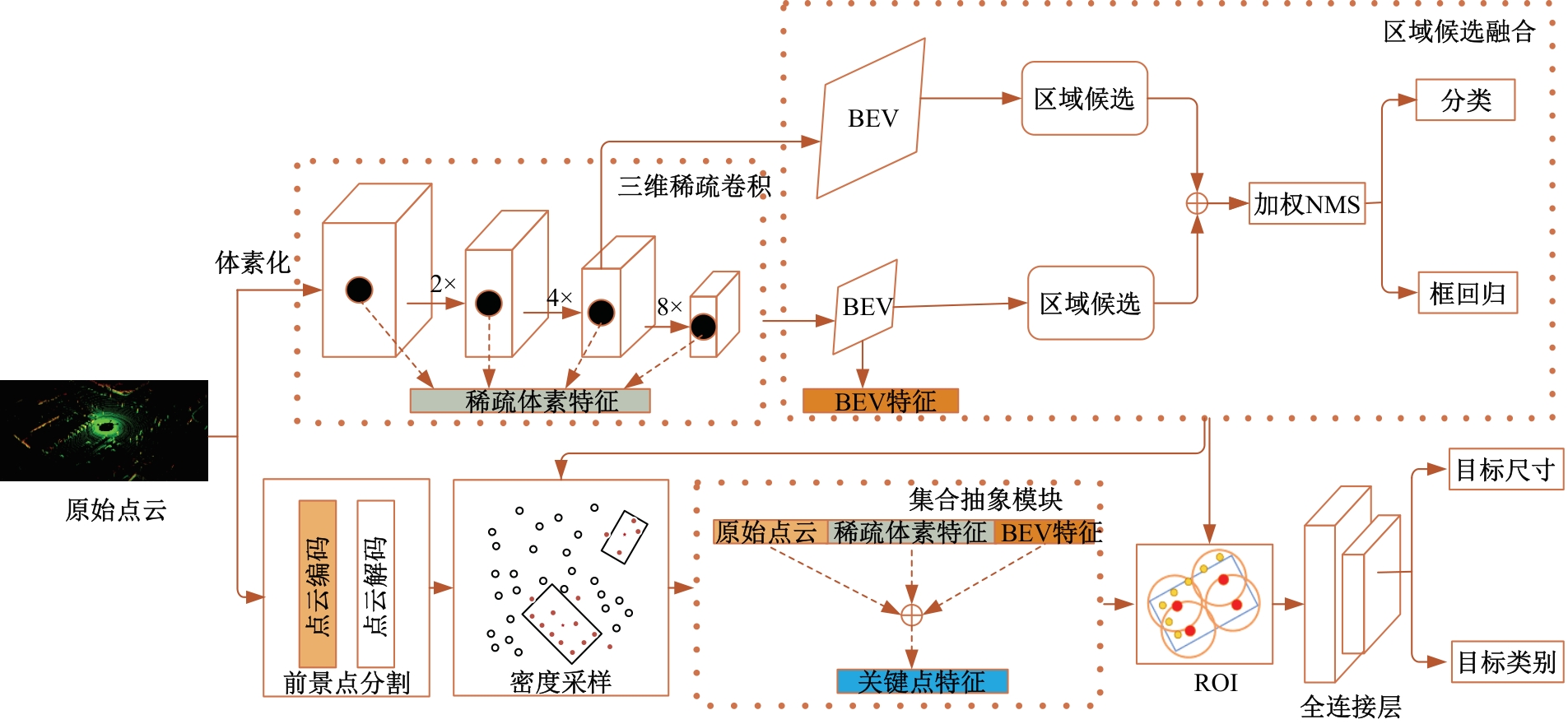
Three-dimensional object detection algorithm based on multi-scale candidate fusion and optimization
Hua CAI1( ),Yan-yang ZHENG1,Qiang FU2,Sheng-yu WANG1,Wei-gang WANG3,Zhi-yong MA3
),Yan-yang ZHENG1,Qiang FU2,Sheng-yu WANG1,Wei-gang WANG3,Zhi-yong MA3
- 1.School of Electronic Information Engineer,Changchun University of Science and Technology,Changchun 130022,China
2.School of Opto-Electronic Engineer,Changchun University of Science and Technology,Changchun 130022,China
3.No. 2 Department of Urology,The First Hospital of Jilin University,Changchun 130061,China
CLC Number:
- TP391







| 1 | Qian R, Garg D, Wang Y, et al. End-to-end pseudo-lidar for image-based 3d object detection[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, USA, 2020: 5881-5890. |
| 2 | Wang Z, Huang Z, Fu J, et al. Object as query: equipping any 2D object detector with 3D detection ability[J]. Arxiv Preprint, 2023, 1: No.230102364. |
| 3 | 陶博, 颜伏伍, 尹智帅, 等. 基于高精度地图增强的三维目标检测算法[J]. 吉林大学学报: 工学版, 2023, 53(3): 802-809. |
| Tao Bo, Yan Fu-wu, Yin Zhi-shuai, et al. 3D object detection algorithm based on high-precision map enhancement[J]. Journal of Jilin University (Engineering and Technology Edition), 2023, 53(3): 802-809. | |
| 4 | Yang Z, Zhou Y, Chen Z, et al. 3D-man: 3D multi-frame attention network for object detection[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Montreal, Canada, 2021: 1863-1872 |
| 5 | Li Y, Yu A W, Meng T, et al. Deepfusion: lidar-camera deep fusion for multi-modal 3d object detection[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, USA, 2022: 17182-17191. |
| 6 | 才华, 寇婷婷, 杨依宁, 等. 基于轨迹优化的三维车辆多目标跟踪[J]. 吉林大学学报: 工学版, 2024, 54(8): 2338-2347. |
| Cai Hua, Kou Ting-ting, Yang Yi-ning, et al. Three-dimensional vehicle multiple target tracking based on trajectory optimization[J]. Journal of Jilin University (Engineering and Technology Edition), 2024, 54(8): 2338-2347. | |
| 7 | Zheng A, Zhang Y, Zhang X, et al. Progressive end-to-end object detection in crowded scenes[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, USA, 2022: 857-866. |
| 8 | Redmon J, Divvala S, Girshick R, et al. You only look once: unified, real-time object detection[C]∥ 2016 IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, USA, 2016: 779-788. |
| 9 | Waleed A, Sherif A, Mahmoud Z, et al. Yolo3D: end-to-end real-time 3D oriented object bounding box detection from lidar point cloud[C]∥Computer Vision-ECCV 2018 Workshops, Munichi, Germany, 2018: 716-728. |
| 10 | Zhou Y, Sun P, Zhang Y, et al. End-to-end multi-view fusion for 3D object detection in lidar point clouds[C]∥Proceedings of the Conference on Robot Learning, Cambridge, USA, 2020: 923–932. |
| 11 | Zhou Y, Tuzel O. Voxelnet: end-to-end learning for point cloud based 3d object detection[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, USA, 2018: 4490-4499. |
| 12 | Yan Y, Mao Y, Li B. Second: sparsely embedded convolutional detection[J]. Sensors, 2018, 18(10): No.18103337. |
| 13 | Qi C R, Su H, Mo K, et al. Pointnet: deep learning on point sets for 3d classification and segmentation[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Honolulu, USA, 2017: 652-660. |
| 14 | Qi C R, Yi L, Su H, et al. Pointnet++: deep hierarchical feature learning on point sets in a metric space[C]∥Proceedings of the 31st International Conference on Neural Information Processing Systems, Long Beach, USA, 2017: 5105-5114. |
| 15 | Qi C R, Liu W, Wu C, et al. Frustum pointnets for 3d object detection from rgb-d data[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Salt Lake City, USA, 2018: 918-927. |
| 16 | Yang Z, Sun Y, Liu S, et al. Std: sparse-to-dense 3d object detector for point cloud[C]∥Proceedings of The IEEE/CVF International Conference on Computer Vision, Seoul, South Korea, 2019: 1951-1960. |
| 17 | Shi S, Guo C, Jiang L, et al. PV-RCNN: point-voxel feature set abstraction for 3d object detection[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, USA, 2020: 10529-10538. |
| 18 | Geiger A, Lenz P, Urtasun R. Are we ready for autonomous driving? the kitti vision benchmark suite[C]∥2012 IEEE Conference on Computer Vision and Pattern Recognition, Providence, Rhode Island,USA, 2012: 3354-3361. |
| 19 | Sun P, Kretzschmar H, Dotiwalla X, et al. Scalability in perception for autonomous driving: Waymo open dataset[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, USA, 2020: 2446-2454. |
| 20 | Ye M, Xu S, Cao T. Hvnet: hybrid voxel network for lidar based 3D object detection[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, USA, 2020: 1631-1640. |
| 21 | Shi S, Wang X, Li H. Pointrcnn: 3D object proposal generation and detection from point cloud[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seoul, South Korea, 2019: 770-779. |
| 22 | Liu Z, Tang H, Lin Y, et al. Point-voxel CNN for efficient 3D deep learning[C]∥Proceedings of the 33rd International Conference on Neural Information Processing Systems, Vancouver, Canada, 2019: 965-975. |
| 23 | 田枫, 姜文文, 刘芳, 等. 混合体素与原始点云的三维目标检测方法[J]. 重庆理工大学学报: 自然科学, 2022, 36(11): 108-117. |
| Tian Feng, Jiang Wen-wen, Liu Fang, et al. Hybrid element and original point cloud 3D target detection method [J]. Journal of Chongqing University of Technology (Natural Science), 2022, 36(11):108-117. | |
| 24 | Shi S, Jiang L, Deng J, et al. PV-RCNN++: point-voxel feature set abstraction with local vector representation for 3D object detection[J]. International Journal of Computer Vision, 2023, 131(2): 531-551. |
| 25 | 车运龙, 袁亮, 孙丽慧. 基于强语义关键点采样的三维目标检测方法[J]. 计算机工程与应用, 2024, 60(9): 254-260. |
| Che Yun-long, Yuan Liang, Sun Li-hui, et al. 3D object detection method based on strong semantic key point sampling[J]. Computer Engineering and Applications, 2024, 60(9): 254-260. | |
| 26 | He C, Zeng H, Huang J, et al. Structure aware single-stage 3D object detection from point cloud[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, USA, 2020: 11873-11882. |
| 27 | Zhang Y, Hu Q, Xu G, et al. Not all points are equal: learning highly efficient point-based detectors for 3D lidar point clouds[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, USA, 2022: 18953-18962. |
| 28 | Lin T Y, Goyal P, Girshick R, et al. Focal loss for dense object detection[C]∥Proceedings of the IEEE International Conference on Computer Vision, Venice, Italy, 2017: 2980-2988. |
| 29 | Lang A H, Vora S, Caesar H, et al. Pointpillars: fast encoders for object detection from point clouds [C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seoul, South Korea, 2019: 12697-12705. |
| 30 | Shi W, Rajkumar R. Point-GNN: graph neural network for 3d object detection in a point cloud[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Seattle, USA, 2020: 1711-1719. |
| 31 | Liu Z, Zhao X, Huang T, et al. Tanet: robust 3D object detection from point clouds with triple attention[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2020, 34(7): 11677-11684. |
| 32 | Shi S, Wang Z, Shi J, et al. From points to parts: 3D object detection from point cloud with part-aware and part-aggregation network[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2020, 43(8): 2647-2664. |
| 33 | Deng J, Shi S, Li P, et al. Voxel R-Cnn: towards high performance voxel-based 3d object detection[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2021, 35(2): 1201-1209. |
| 34 | Song N, Jiang T, Yao J. JPV-Net: joint point-voxel representations for accurate 3D object detection[J]. Proceedings of the AAAI Conference on Artificial Intelligence, 2022, 36(2): 2271-2279. |
| 35 | Yang Z, Jiang L, Sun Y, et al. A unified query-based paradigm for point cloud understanding[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, USA, 2022: 8541-8551. |
| 36 | Yin T, Zhou X, Krahenbuhl P. Center-based 3D object detection and tracking[C]∥Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, Nashville, USA, 2021: 11784-11793. |
| 37 | Zhou Z, Zhao X, Wang Y, et al. Centerformer: center-based transformer for 3D object detection[C]∥European Conference on Computer Vision, Tel Aviv, Israel, 2022: 496-513. |
| 38 | He C, Li R, Li S, et al. Voxel set transformer: a set-to-set approach to 3D object detection from point clouds[C]∥2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition, New Orleans, USA, 2022: 8417-8427. |
| 39 | Sheng H, Cai S, Liu Y, et al. Improving 3D object detection with channel-wise transformer[C]∥Proceedings of the IEEE/CVF International Conference on Computer Vision, Montreal, Canada, 2021: 2743-2752. |
| [1] | Hua CAI,Ting-ting KOU,Yi-ning YANG,Zhi-yong MA,Wei-gang WANG,Jun-xi SUN. Three-dimensional vehicle multi-target tracking based on trajectory optimization [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(8): 2338-2347. |
| [2] | Xin CHENG,Sheng-xian LIU,Jing-mei ZHOU,Zhou ZHOU,Xiang-mo ZHAO. 3D object detection algorithm fusing dense connectivity and Gaussian distance [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(12): 3589-3600. |
| [3] | Bo TAO,Fu-wu YAN,Zhi-shuai YIN,Dong-mei WU. 3D object detection based on high⁃precision map enhancement [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 802-809. |
|
||