Journal of Jilin University(Engineering and Technology Edition) ›› 2025, Vol. 55 ›› Issue (3): 963-973.doi: 10.13229/j.cnki.jdxbgxb.20230584
Previous Articles Next Articles
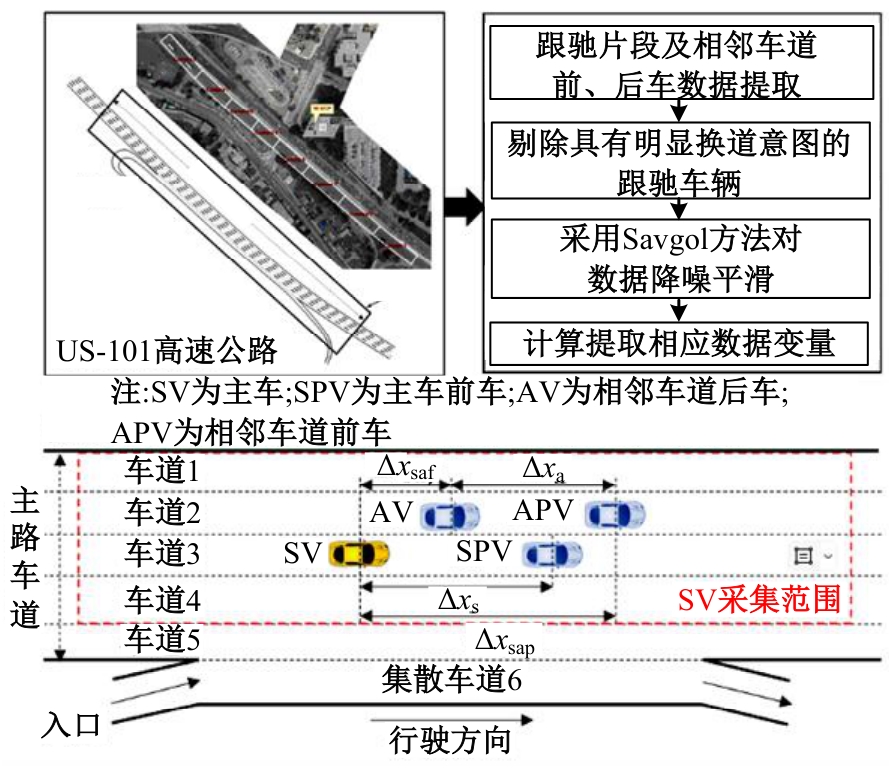
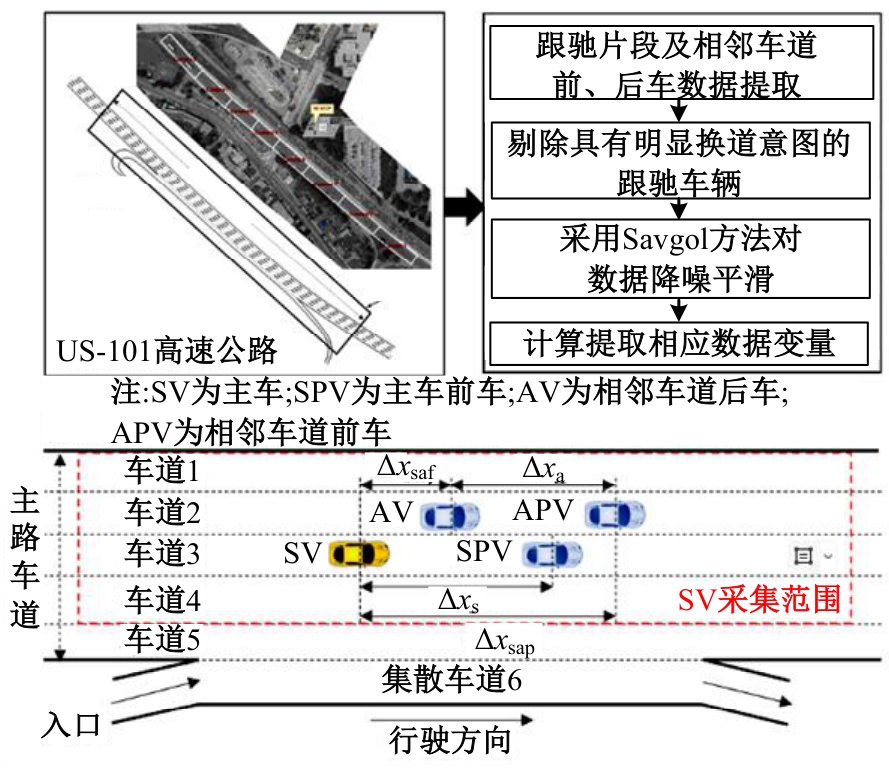
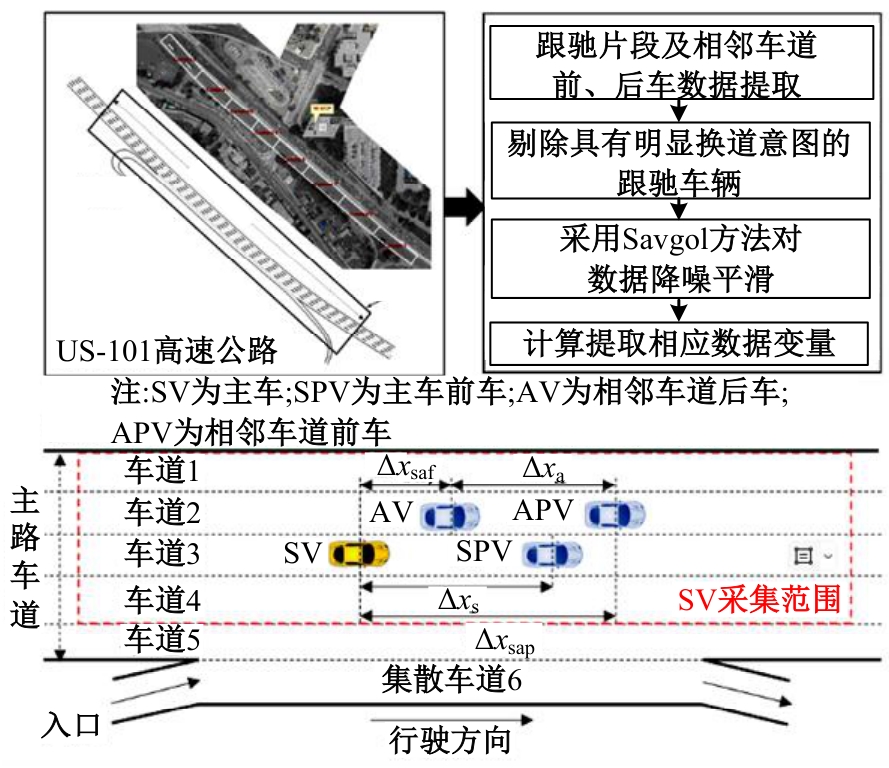
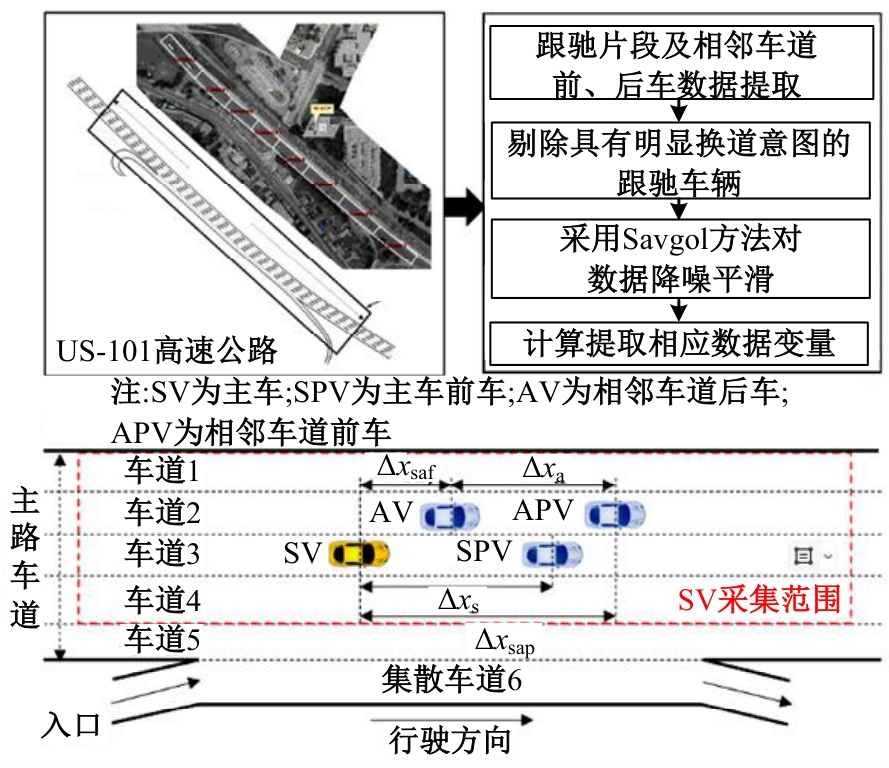
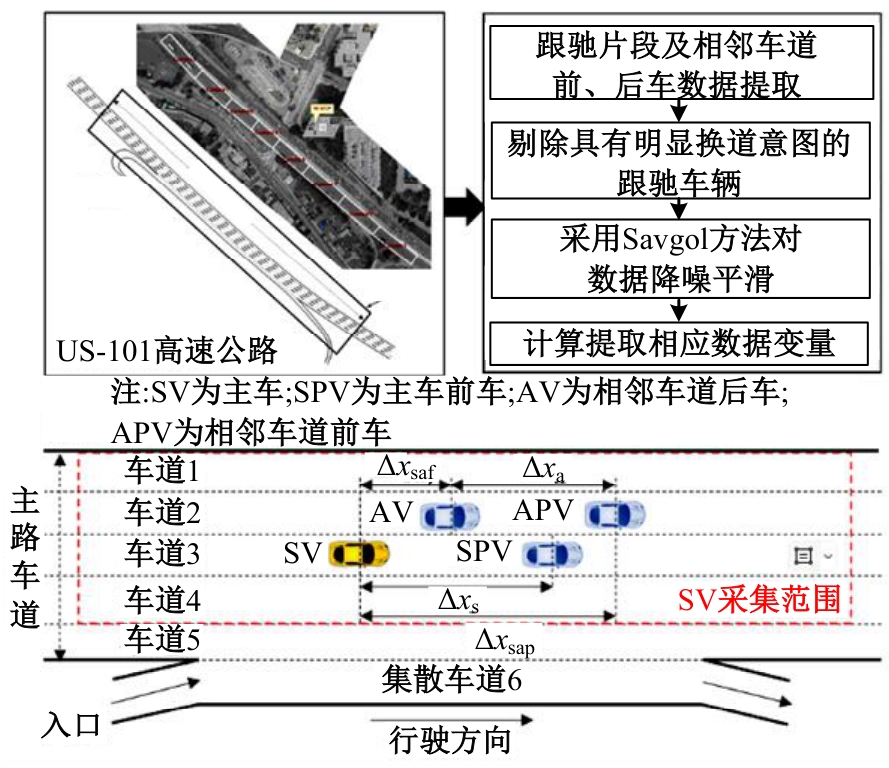
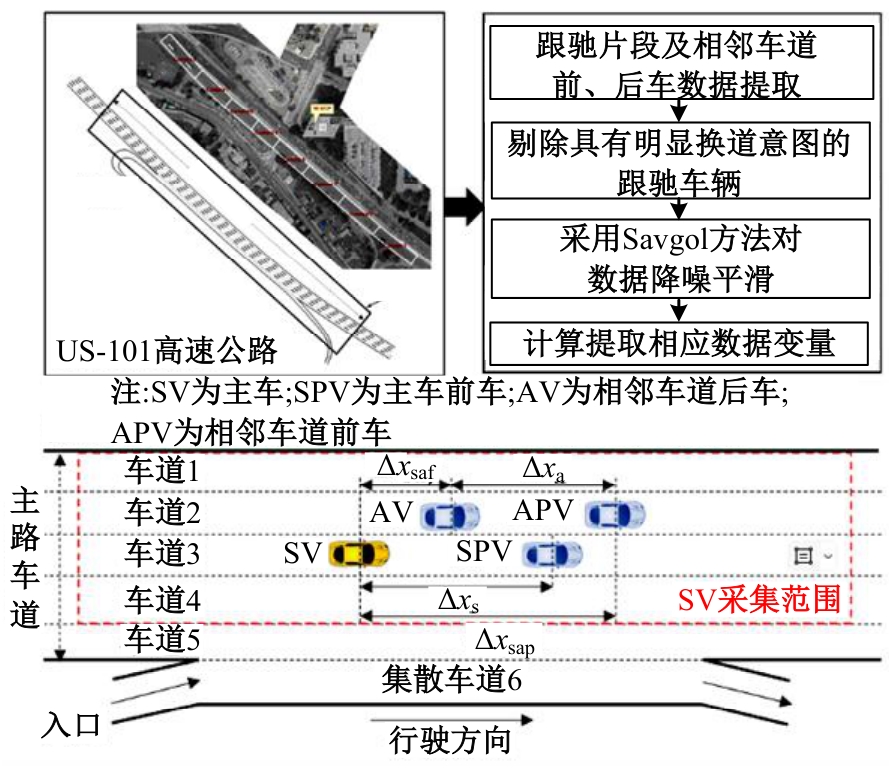
Mechanism and modeling of car⁃following behavior under local multi⁃vehicle influence
Lan-fang ZHANG( ),Gen-ze LI,Ting-yu LIU,Bo YU()
),Gen-ze LI,Ting-yu LIU,Bo YU()
- The Key Laboratory of Road and Traffic Engineering,Ministry of Education,Tongji University,Shanghai 201804,China
CLC Number:
- U491.2


| 1 | Chen J, Zhao C, Jiang S C, et al. Safe, efficient, and comfortable autonomous driving based on cooperative vehicle infrastructure system[J]. International Journal of Environmental Research and Public Health, 2023, 20(1): No. 893. |
| 2 | Wang L, Horn B K P. On the stability analysis of mixed traffic with vehicles under car-following and bilateral control[J]. IEEE Transactions on Automatic Control, 2020, 65(7): 3076-3083. |
| 3 | 杨龙海, 张春, 仇晓赟, 等. 车辆跟驰模型研究进展[J]. 交通运输工程学报, 2019, 19(5): 125-138. |
| Yang Long-hai, Zhang Chun, Qiu Xiao-yun, et al. Research progress on car-following models[J]. Journal of Traffic and Transportation Engineering, 2019, 19(5): 125-138. | |
| 4 | 陈漩, 高自友, 赵小梅, 等. 反馈控制双车道跟驰模型研究[J]. 物理学报, 2007, 56(4): 2024-2029. |
| Chen Xuan, Gao Zi-you, Zhao Xiao-mei, et al. Study on the two-lane feedback controled car-following model[J]. Acta Physica Sinica, 2007, 56(4): 2024-2029. | |
| 5 | 杜文举, 李引珍, 俞建宁. 基于驾驶人特性的双车道跟驰模型稳定性分析[J]. 交通运输系统工程与信息, 2019, 19(5): 66-77, 93. |
| Du Wen-ju, Li Yin-zhen, Yu Jian-ning. Stability analysis of a two-lane car-following model with effect of driver' s characteristics[J]. Journal of Transportation Systems Engineering and Information Technology, 2019, 19(5): 66-77, 93. | |
| 6 | Jiang N, Yu B, Cao F, et al. An extended visual angle car-following model considering the vehicle types in the adjacent lane[J]. Physica A-Statistical Mechanics and Its Applications, 2021, 566:No.125665. |
| 7 | Balaji P, Benjamin C. Speed-spacing dependency on relative speed from the adjacent lane: new insights for car following models[J]. Transportation Research Part B-Methodological, 2016, 82: 74-90. |
| 8 | Eric P. Considerations about the quality assessment of travel time and travel distance distributions in transport modelling: a proposal for a standardized methodology[J]. Transportation, 2020, 48(3): 1285-1309. |
| 9 | 潘恒彦, 张文会, 梁婷婷, 等. 基于MIMIC与机器学习的出租车驾驶员交通事故诱因分析[J]. 吉林大学学报: 工学版, 2023, 53(2): 457-467. |
| Pan Heng-yan, Zhang Wen-hui, Liang Ting-ting, et al. Inducement analysis of taxi drivers' traffic accidents based on MIMIC and machine learning[J]. Journal of Jilin University (Engineering and Technology Edition), 2023, 53(2): 457-467. | |
| 10 | Yao H P, Liu C, Zhang P Y, et. al . Identification of encrypted traffic through attention mechanism based long short term memory[J]. IEEE Transactions on Big Data, 2022, 8(1): 241-252. |
| 11 | Treiber M, Helbing D. Memory effects in microscopic traffic models and wide scattering in flow-density data[J]. Physical Review E, 2003, 68(4):No.046119. |
| 12 | Vaswani A, Shazeer N, Parmar N, et al. Attention is all you need[C]∥31st Conference on Neural Information Processing Systems, Long Beach, USA, 2017: 5998-6008. |
| 13 | 李林恒, 甘婧, 曲栩, 等. 智能网联环境下基于安全势场理论的车辆跟驰模型[J]. 中国公路学报, 2019, 32(12): 76-87. |
| Li Lin-heng, Gan Jing, Qu Xu, et al. Car-following model based on safety potential field theory under connected and automated vehicle environment[J]. China Journal of Highway and Transport, 2019, 32(12): 76-87. |
| [1] | Xiao-feng JI,Ying-hao XU,Yong-ming PU,Jing-jing HAO,Wen-wen QIN. Risk prediction model of passenger car following behavior under truck movement interruption of two-lane highway in mountainous area [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(5): 1323-1331. |
| [2] | Jie HE,Chang-jian ZHANG,Xin-tong YAN,Chen-wei WANG,Yun-tao YE. Analyzing traffic crash risk of freeway characteristics based on micro⁃kinetic parameters [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(1): 162-172. |
| [3] | Qiang HUA,Li-sheng JIN,Bai-cang GUO,Shun-ran ZHANG,Yu-han WANG. A recognition method for driver's cognitive distraction in simulated mixed traffic environment [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(8): 1800-1807. |
| [4] | GAO Kun, TU Hui-zhao, SHI Heng, LI Zhen-fei. Effect of low visibility in haze weather condition on longitudinal driving behavior in different car-following stages [J]. 吉林大学学报(工学版), 2017, 47(6): 1716-1727. |
| [5] | SUN Lu, XU Jian, CUI Xiang-min. Panel data models for analysis and prediction of crash count [J]. 吉林大学学报(工学版), 2015, 45(6): 1771-1778. |
| [6] | XU Jian, SUN Lu. Modeling of excess zeros issue in crash count andysis [J]. 吉林大学学报(工学版), 2015, 45(3): 769-775. |
| [7] | JIN Li-sheng, WANG Yan, LIU Jing-hua, WANG Ya-li, ZHENG Yi. Front vehicle detection based on Adaboost algorithm in daytime [J]. 吉林大学学报(工学版), 2014, 44(6): 1604-1608. |
| [8] | QU Da-yi, YANG Jian, CHEN Xiu-feng, BIAN Xiao-hua. Molecular kinetics behavior of car-following and its model [J]. , 2012, 42(05): 1198-1202. |
|
||