Journal of Jilin University(Engineering and Technology Edition) ›› 2025, Vol. 55 ›› Issue (4): 1453-1466.doi: 10.13229/j.cnki.jdxbgxb.20230733
Previous Articles Next Articles
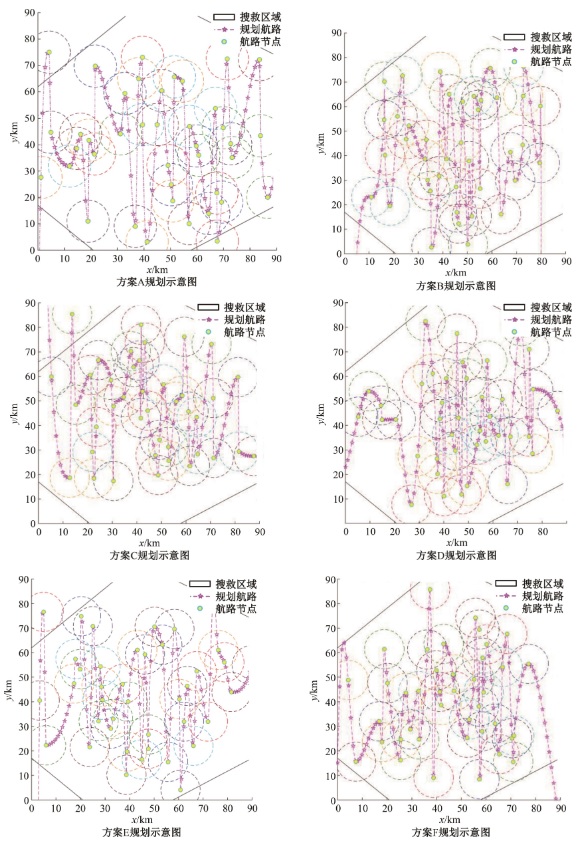
Passive unmanned maritime search and rescue routing method
Han ZHANG1( ),Yan-yan HUANG1(),Ze GENG1,Tian-de CHEN2
),Yan-yan HUANG1(),Ze GENG1,Tian-de CHEN2
- 1.School of Automation,Nanjing University of Science and Technology,Nanjing 210094,China
2.The 28th Research Institute of China Electronics Technology Group Corporation,Nanjing 210007,China
CLC Number:
- TP391.9

| [1] | 孙万, 柳堤, 李政. 我国海上人命救助现状、问题和对策初探[J]. 今日科苑, 2021(7): 26-32. |
| Sun Wan, Liu Di, Li Zheng. Preliminary study on current status, problems, and potential innovations of maritime life salvage in China[J]. Modern Science, 2021(7): 26-32. | |
| [2] | 朱岿, 牟林, 王道胜, 等. 海上搜救辅助决策技术研究进展[J]. 应用海洋学学报, 2019, 38(3): 440-449. |
| Zhu Kui, Mou Lin, Wang Dao-sheng, et al. Advance in maritime search and rescue decision support techniques[J]. Journal of Applied Oceanography, 2019, 38(3): 440-449. | |
| [3] | 王秀玲, 尹勇, 赵延杰, 等. 无人艇海上搜救路径规划技术综述[J]. 船舶工程, 2023, 45(4): 50-57. |
| Wang Xiu-ling, Yin Yong, Zhao Yan-jie, et al. Overview of USV maritime search and rescue path planning technology[J]. Ship Engineering, 2023, 45(4): 50-57. | |
| [4] | 李宁, 张强. 基于北斗系统的海上应急救援系统的研究[J]. 中国海事, 2019(7): 49-51. |
| Li Ning, Zhang Qiang. On the emergent maritime search and rescue system based on the Beidou System [J]. China Maritime Safety, 2019(7): 49-51. | |
| [5] | 陈天德, 黄炎焱, 沈炜. 基于虚拟障碍物法的无震荡航路规划[J]. 兵工学报, 2019, 40(3): 651-658. |
| Chen Tian-de, Huang Yan-yan, Shen Wei. Non-oscillation path planning based on virtual obstacle method[J]. Acta Armamentarii, 2019, 40(3):651-658. | |
| [6] | Jiang T, Lin D, Song T. Finite-time control for small-scale unmanned helicopter with disturbances[J]. Nonlinear Dynamics, 2019, 96: 1747-1763. |
| [7] | Melsom A, Counillon F, La Casce J H, et al. Forecasting search areas using ensemble ocean circulation modeling[J]. Ocean Dynamics, 2012, 62: 1245-1257. |
| [8] | Cho S W, Park H J, Lee H, et al. Coverage path planning for multiple unmanned aerial vehicles in maritime search and rescue operations[J]. Computers & Industrial Engineering, 2021, 161: No.107612. |
| [9] | Ai B, Jia M, Xu H, et al. Coverage path planning for maritime search and rescue using reinforcement learning[J]. Ocean Engineering, 2021, 241: No. 110098. |
| [10] | Larson J, Bruch M, Ebken J. Autonomous navigation and obstacle avoidance for unmanned surface vehicles[C]∥Unmanned Systems Technology VIII,Orlando,USA, 2006, 6230: 53-64. |
| [11] | Campbell S, Naeem W, Irwin G W. A review on improving the autonomy of unmanned surface vehicles through intelligent collision avoidance manoeuvres[J]. Annual Reviews in Control, 2012, 36(2): 267-283. |
| [12] | 熊勇, 余嘉俊, 张加, 等. 无人艇研究进展及发展方向[J]. 船舶工程, 2020, 42(2): 12-19. |
| Xiong Yong, Yu Jia-jun, Zhang Jia, et al. Research progress and development direction of unmanned boat[J]. Ship Engineering, 2020, 42(2): 12-19. | |
| [13] | 王浩亮, 尹晨阳, 卢丽宇, 等. 面向海上搜救的UAV与USV集群协同路径跟踪控制[J]. 中国舰船研究, 2022, 17(5): 157-165. |
| Wang Hao-liang, Yin Chen-yang, Lu Li-yu, et al. Cooperative path following control of UAV and USV cluster for maritime search and rescue[J]. Chinese Journal of Ship Research, 2022, 17(5): 157-165. | |
| [14] | Nash L, Hover G L, Burns R E. Additional analysis of probability of detection(POD) in search and rescue (SAR) project data[R].New London: Analysis and Technology, 1982. |
| [15] | 李家林, 张建强, 李春来. 基于优化人工势场法的无人艇局部路径规划[J]. 舰船科学技术, 2022, 44(16): 69-73. |
| Li Jia-lin, Zhang Jian-Qiang, Li Chun-lai. Local path planning of unmanned boat based on optimized artificial potential field method[J]. Ship Science and Technology, 2022, 44(16): 69-73. | |
| [16] | Breivik Ø, Allen A A, Maisondieu C, et al. Wind-induced drift of objects at sea: the leeway field method[J]. Applied Ocean Research, 2011, 33(2): 100-109. |
| [17] | 王军, 于安民, 杨春林. 海上搜寻船舶选择问题研究[J]. 重庆交通大学学报:自然科学版, 2021, 40(3):7-15. |
| Wang Jun, Yu An-min, Yang Chun-lin. Selection problem of search ship at sea[J]. Journal of Chongqing Jiaotong University (Natural Science), 2021, 40(3): 7-14. | |
| [18] | 李鸿一, 陈锦涛, 任鸿儒, 等. 基于随机采样的高层消防无人机协同搜索规划[J]. 中国科学: 信息科学,2022, 52(9): 1610-1626. |
| Li Hong-yi, Chen Jin-tao, Ren Hong-ru, et al. Random-sampling-based multi-UAV cooperative search planning for high-rise firefighting[J]. Science in China(Information Sciences), 2022, 52(9): 1610-1626. | |
| [19] | Mirjalili S, Lewis A. The whale optimization algorithm[J]. Advances in Engineering Software, 2016, 95: 51-67. |
| [20] | 周寅飞, 张立华, 贾帅东, 等. 最大可航窗口序列约束贝塞尔曲线的无人船自主航行航线规划方法[J].武汉大学学报: 信息科学版, 2024, 49(7): 1224-1236. |
| Zhou Yin-fei, Zhang Li-hua, Jia Shuai-dong, et al. Autonomous navigation route planning method of unmanned ship based on bessel curves constrained by maximum navigable window sequence[J]. Geomatics and Information Science of Wuhan University, 2024, 49(7): 1224-1236. | |
| [21] | 王晓光, 何晓夫, 武学祺. 基于多属性折中决策的空面制导弹药配置方案评价与优选[J]. 弹箭与制导学报, 2019, 39(1): 139-142. |
| Wang Xiao-guang, He Xiao-fu, Wu Xue-qi. Function evaluation and optimal selection of air-surface guided ammunition configuration based on VIKOR [J]. Journal of Projectiles,Rockets,Missiles and Guidance, 2019, 39(1): 139-142. | |
| [22] | 袁书泽. 海难人命救助的有效时限初步探讨[J]. 中国医药科学, 2011, 11(1): 146,149. |
| Yuan Shu-ze. Preliminary discussion on the effective time limit of life-saving disaster relief[J]. China Medicine and Pharmacy, 2011, 11(1): 146,149. | |
| [23] | 任东彦. 海上搜救力量配置问题研究[J]. 舰船电子工程, 2022, 42(1): 19-22. |
| Ren Dong-yan. Research on configuration of search and rescue forces at sea[J]. Ship Electronic Engineering, 2022, 42(1): 19-22. | |
| [24] | 罗志远, 丰硕, 刘小峰, 等. 一种基于分步遗传算法的多无人清洁车区域覆盖路径规划方法[J]. 电子测量与仪器学报, 2020, 34(8): 43-50. |
| Luo Zhi-yuan, Feng Shuo, Liu Xiao-feng, et al. Method of area coverage path planning of multi-unmanned cleaning vehicles based on step by step genetic algorithm[J]. Journal of Electronic Measurement and Instrumentation, 2020, 34(8): 43-50. |
| [1] | Zhi-yong SHE,Tong-ming ZHU,Wang-kui LIU. Rapid trajectory programming for hypersonic umanned areial vehicle in ascent phase based on proximal policy optimization [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 863-870. |
| [2] | Yi-ran WANG,Jing-xu CHEN,Yue-ping WANG,Jin-biao HUO,Zhi-yuan LIU. Instant demand⁃responsive scheme for customized bus considering service fairness [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(11): 2574-2581. |
| [3] | Bi-da ZHANG,Qiang YAN,Lin ZHANG,Hai-rui ZHANG. Charging and battery swapping route planning for electric vehicles based on real-time traffic information [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(10): 2333-2342. |
| [4] | Yi YANG,Si⁃cai WANG,Ying NAN. Optimal algorithm of searching route for large amphibious aircraft [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 963-971. |
|