Journal of Jilin University(Engineering and Technology Edition) ›› 2019, Vol. 49 ›› Issue (3): 963-971.doi: 10.13229/j.cnki.jdxbgxb20171135
Previous Articles Next Articles
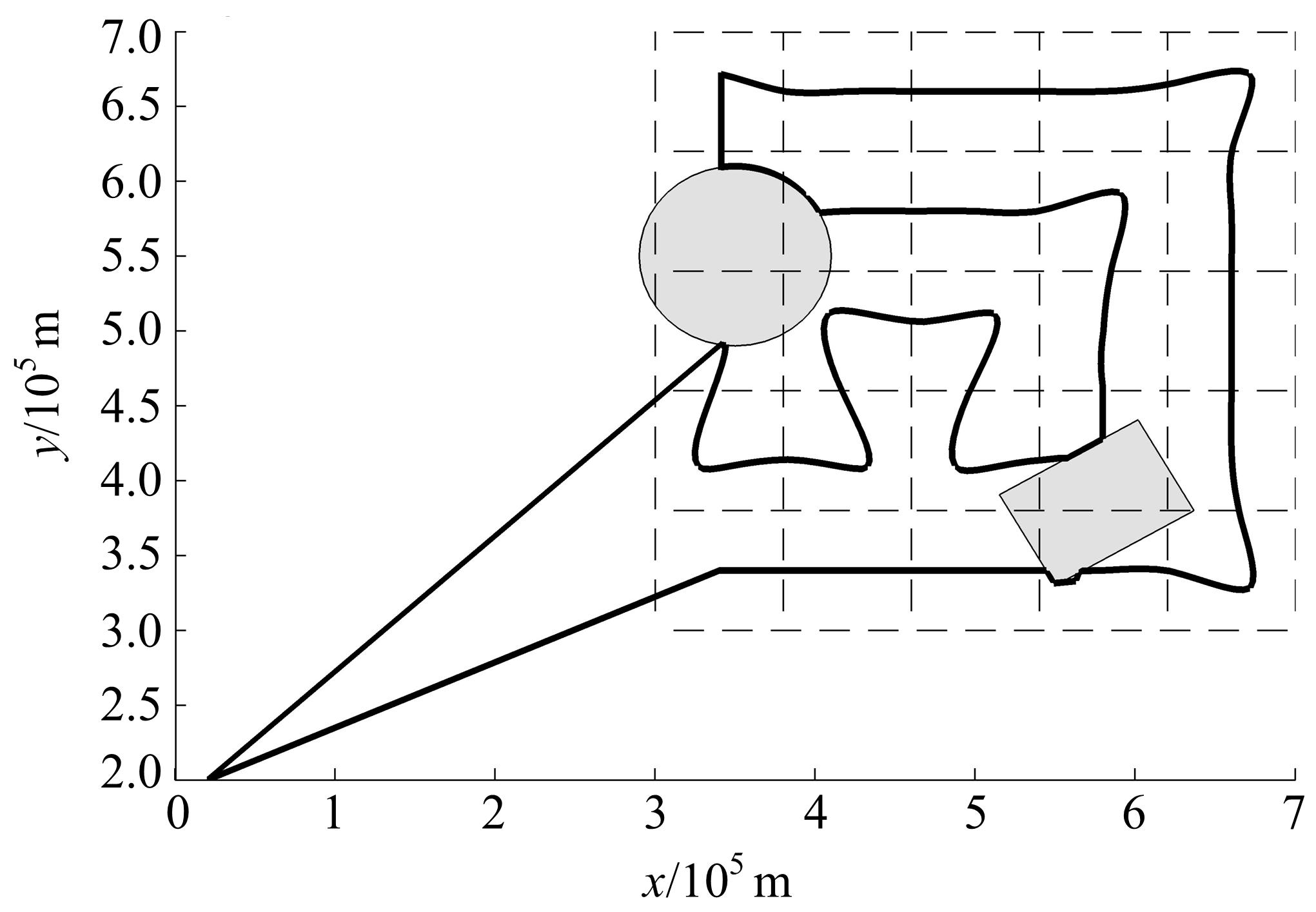
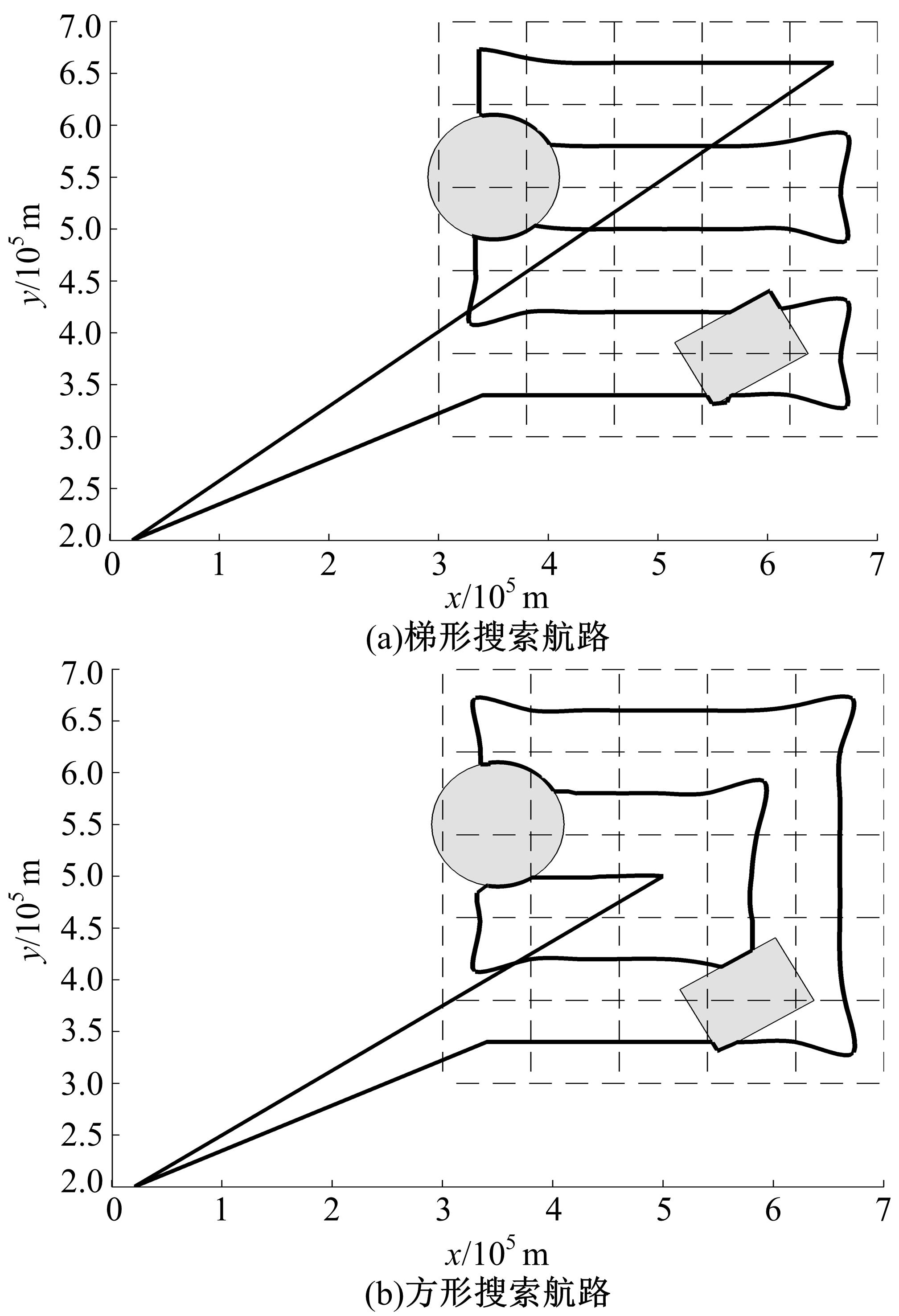
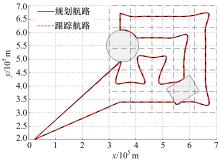
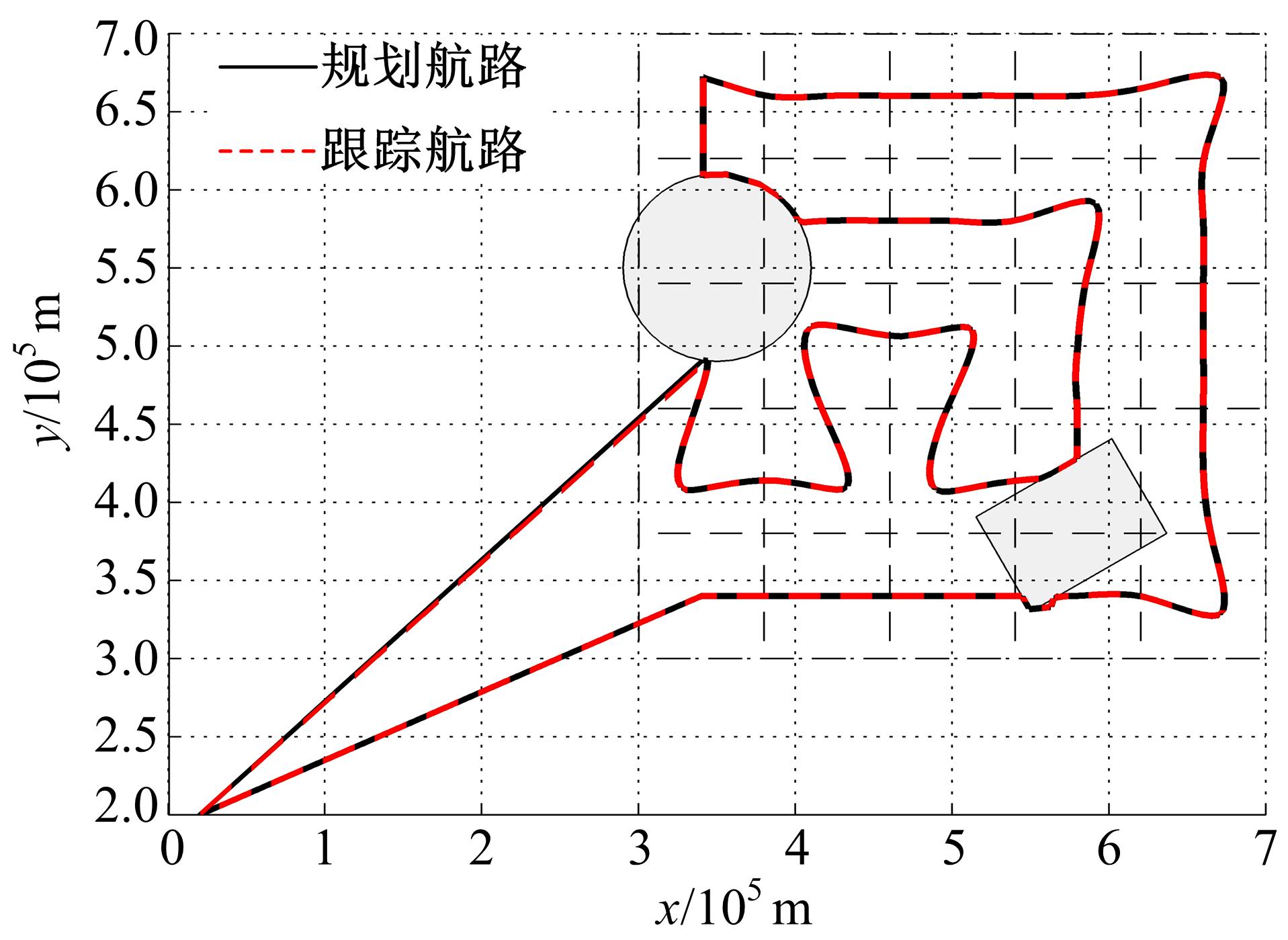
Optimal algorithm of searching route for large amphibious aircraft
Yi YANG1( ),Si⁃cai WANG2,Ying NAN1()
),Si⁃cai WANG2,Ying NAN1()
- 1. College of Astronautics, Nanjing University of Aeronautics and Astronautics, Nanjing 210016, China
2. China Aviation Industry General Aircraft Co. , Ltd. , Zhuhai 519000, China
CLC Number:
- V249






| 1 | 厉骏, 蔡志勇, 谢辉 . 大型水陆两栖飞机海上搜索水平导航需求的设计[J]. 科技展望, 2014(14): 24⁃25. |
| Li Jun , Cai Zhi⁃yong , Xie Hui . Design of maritime search horizontal navigation requirements for large amphibious aircraft[J]. Science and Technology, 2014(14):24⁃25. | |
| 2 | Galceran E , Carreras M . A survey on coverage path planning for robotics[J]. Robotics and Autonomous Systems, 2013, 61(12): 1258⁃1276. |
| 3 | Oksanen T , Visala A . Coverage path planning algorithms for agricultural field machines[J]. Journal of Field Robotics, 2009, 26 (8): 651⁃668. |
| 4 | Acar E U , Choset H , Rizzi A A . Morse decompositions for coverage tasks[J]. International Journal of Robotics Research, 2002, 21(4): 331⁃334. |
| 5 | Shivashankar V , Jain R , Kuter U , et al . Real⁃time planning for covering an initially⁃unknown spatial environment[C]∥Proceedings of the TwentyFourth International Florida Artificial Intelligence Research Society Conference,Palm Beach, Florida, USA, 2011. |
| 6 | Lee T , Baek S , Choi Y . Smooth coverage path planning and control of mobile robots based on high⁃resolution grid map representation[J]. Robotics and Autonomous Systems, 2011, 59(10): 801⁃812. |
| 7 | Luo C , Yang S . A bioinspired neural network for real⁃time concurrent map building and complete coverage robot navigation in unknown environments[J]. IEEE Transactions on Neural Networks, 2008, 19 (7): 1279⁃1298. |
| 8 | Schafle T R , Mohamed S , Uchiyama N , et al . Coverage path planning for mobile robots using genetic algorithm with energy optimization[C]∥2016 International Electronics Symposium (IES), Bali, Indonesia, 2016: 99⁃104. |
| 9 | 严浙平, 何靓文, 李娟 . 多域限界内多 AUV 巡逻航路规划方法[J]. 水下无人系统学报, 2017, 25(3): 237⁃242. |
| Yan Zhe⁃ping , He Jing⁃wen , Li Juan . Path planning method for multi⁃AUVs patrol in restricted multizone area[J]. Journal of Unmanned Undersea Systems, 2017, 25(3): 237⁃242. | |
| 10 | 艾兵, 杨睿 . 直升机海上搜索航路辅助规划算法[J]. 电光与控制, 2007, 15(7): 1⁃5. |
| Ai Bing , Yang Rui . The algorithm of helicopter maritime search auxiliary route⁃planning[J]. Electronics Optics & Control, 2007, 15(7): 1⁃5. | |
| 11 | 李沛, 段海滨 . 基于改进万有引力搜索算法的无人机航路规划[J]. 中国科学:技术科学, 2012, 42(10): 1130⁃1136. |
| Li Pei , Duan Hai⁃bin . Path planning of unmanned aerial vehicle based on improved gravitational search algorithm[J]. Science China Technological Sciences, 2012, 42(10): 1130⁃1136. | |
| 12 | 陈谋, 肖健, 姜长生 . 基于改进蚁群算法的无人机三维航路规划[J]. 吉林大学学报:工学版, 2008, 38(4): 991⁃995. |
| Chen Mou , Xiao Jian , Jiang Chang⁃sheng . Three⁃ dimensional path planning of UAV with improved ant algorithm[J]. Journal of Jilin University (Engineering and Technology Edition), 2008, 38(4): 991⁃995. | |
| 13 | 马向玲, 陈旭, 雷宇曜 . 基于数据链的无人机航路规划A*算法研究[J]. 电光与控制, 2009, 16(12): 15⁃17, 21. |
| Ma Xiang⁃ling , Chen Xu , Lei Yu⁃yao . The data link based A* algorithm used for UCAV path planning[J]. Electronics Optics&Control, 2009,16(12): 15⁃17,21. | |
| 14 | 梁宵, 王宏伦, 孟光磊, 等 . 三维真实地形环境下无人机救援航路规划方法[J]. 北京航空航天大学学报, 2015, 41(7): 1183⁃1187. |
| Liang Xiao , Wang Hong⁃lun , Meng Guang⁃lei , et al . Path planning for UAV under three⁃dimensional real terrain in rescue mission[J]. Journal of Beijing University of Aeronautics and Astronautics, 2015, 41(7): 1183⁃1187. | |
| 15 | 梁宵, 王宏伦, 李大伟, 等 . 基于流水避石原理的无人机三维航路规划方法[J]. 航空学报, 2013, 34(7): 1670⁃1681. |
| Liang Xiao , Wang Hong⁃lun , Li Da⁃wei , et al . Three⁃dimensional path planning for unmanned aerial vehicles based on principles of stream avoiding obstacles[J]. Acta Aeronautica ET Astronautica Sinica, 2013, 34(7): 1670⁃1681. | |
| 16 | 魏瑞轩, 许卓凡, 王树磊, 等 . 基于Laguerre图的自优化A⁃Star无人机航路规划算法[J]. 系统工程与电子技术, 2015, 37(3): 577⁃582. |
| Wei Rui⁃xuan , Xu Zhuo⁃fan , Wang Shu⁃lei , et al . Self⁃optimization A⁃Star algorithm for UAV path planning based on Laguerre diagram[J]. Systems Engineering and Electronics, 2015, 37(3): 577⁃582. | |
| 17 | 刘重, 高晓光, 符小卫, 等 . 基于反步法和非线性动态逆的无人机三维航路跟踪制导控制[J]. 兵工学报, 2014, 35(12): 2030⁃2040. |
| Liu Zhong , Gao Xiao⁃guang , Fu Xiao⁃wei , et al . Three⁃dimensional path tracking guidance and control for unmanned aerial vehicle based on back⁃stepping and nonlinear dynamic inversion[J]. Acta Armamentarii, 2014, 35(12): 2030⁃2040. |
| [1] | PAN Hai-yang, LIU Shun-an, YAO Yong-ming. Depth information-basd autonomous aerial refueling [J]. 吉林大学学报(工学版), 2014, 44(6): 1750-1756. |
| [2] | GUO Li-dong,TAN Zhen-fan,WEI Yan-hui. Compoundaxis macromicro control and modeling of laser weapon tracking system [J]. 吉林大学学报(工学版), 2011, 41(03): 859-864. |
| [3] | LI Ming-Tao, ZHENG Jian-Hua, YU Xi-Zheng, GAO Dong. Transfer trajectory design for SunEarth Halo orbit based on manifold insertion [J]. 吉林大学学报(工学版), 2011, 41(02): 585-0589. |
| [4] | BI Yong-Tao, HE Feng-Hua, YAO Yu. Design of blended lateral thrust and aerodynamic surface control strategy for agile missile [J]. 吉林大学学报(工学版), 2011, 41(02): 590-0596. |
| [5] | ZHANG Tao, XU Xiao-Su. Measurement delay effect on INS/GPS/DVL hybrid navigation system and calibration method analysis [J]. 吉林大学学报(工学版), 2010, 40(06): 1735-1740. |
| [6] | ZHOU Wen-Ya, YANG Di, LIANG Xin-Gang. Using Gauss pseudospectral method to optimize aeroassisted orbit transfer [J]. 吉林大学学报(工学版), 2010, 40(05): 1454-1459. |
| [7] | CHEN Min,ZHANG Shi-jie,ZHANG Ying-chun. Combined attitude control method of small satellite using reaction wheels and magnetorquers [J]. 吉林大学学报(工学版), 2010, 40(04): 1155-1160. |
| [8] | TIAN Ji-chao, CUI Nai-gang, RONG Si-yuan. Orbit transformation scheme for satellite formation reconfiguration [J]. 吉林大学学报(工学版), 2010, 40(04): 1161-1165. |
| [9] | QI Ying-hong,CAO Xi-bin,ZHENG Peng-fei. Small satellite co-orbital transfer strategy [J]. 吉林大学学报(工学版), 2010, 40(01): 293-0298. |
| [10] | LI Yu-qing,XU Min-qiang,WANG Ri-xin. Scheduling for observations of deep space spacecraft under uncertainty [J]. 吉林大学学报(工学版), 2009, 39(06): 1590-1594. |
| [11] | WANG Ji-He, ZHANG Jin-Xiu, CAO Xi-Bin. Probability density function basd collision monitoring method within formation flight [J]. 吉林大学学报(工学版), 2009, 39(05): 1395-1400. |
| [12] | LI Zhe, DING Zhen-Liang, YUAN Feng. Optical measurement of aircraft attitude parameters and accuracy Monte Carlo simulation [J]. 吉林大学学报(工学版), 2009, 39(05): 1401-1406. |
| [13] | LI Ming-Tao, ZHENG Jian-Hua, YU Ti-Zheng, GAO Dong. Strategy for impulsive station keeping of libration point missions [J]. 吉林大学学报(工学版), 2009, 39(05): 1407-1412. |
| [14] |
LIU Wei,MENG Xin,ZHENG Jian-hua .
Planning and scheduling of earth observing satellites [J]. 吉林大学学报(工学版), 2009, 39(02): 551-0554. |
| [15] | CAO Xi-bin,HE Dong-lei . Relative motion equation for perturbed ellipitical reference orbit formation [J]. 吉林大学学报(工学版), 2009, 39(01): 234-239. |
|