Journal of Jilin University(Engineering and Technology Edition) ›› 2020, Vol. 50 ›› Issue (2): 719-729.doi: 10.13229/j.cnki.jdxbgxb20181043
Indoor pedestrian detection and tracking from distributed two⁃dimensional laser range finders
Zhao-zheng HU1,2( ),Zhao-kang LI1,Qian-wen TAO2
),Zhao-kang LI1,Qian-wen TAO2
- 1.School of Electronic and Information Engineering, Hebei University of Technology, Tianjin 300401, China
2.Intelligent Transportation System Research Center, Wuhan University of Technology, Wuhan 430063, China
CLC Number:
- TP277















| 1 | Uenoyama N, Niitsuma M. Temporal segmentation of environmental map based on changing rate of activity areas and improvement of tracking method using LRF[C]∥IEEE/SICE International Symposium on System Integration. Nagoya, Japan: IEEE, 2016: 57-62. |
| 2 | Seow Y, Miyagusuku R, Yamashita A, et al. Detecting and solving the kidnapped robot problem using laser range finder and wifi signal[C]∥IEEE International Conference on Real-time Computing & Robotics, Okinawa, Japan, 2018: 18-22. |
| 3 | 张晓冬, 李建桥, 王洋, 等. 基于激光测距仪的地面不平度的测量与分析[J]. 吉林大学学报: 工学版, 2013, 43(5): 1258-1263. |
| Zhang Xiao-dong, Li Jian-qiao, Wang Yang, et al. Measurement and analysis of terrain roughness using distance laser sensor[J]. Journal of Jilin University (Engineering and Technology Edition), 2013, 43(5): 1258-1263. | |
| 4 | 赵静荣, 米阳, 张淑梅, 等. 人眼安全激光测距系统误差分析[J]. 吉林大学学报: 工学版, 2012, 42(增刊1): 410-414. |
| Zhao Jing-rong, Mi Yang, Zhang Shu-mei, et al. Error analysis of eye-safe laser rangefinder[J]. Journal of Jilin University (Engineering and Technology Edition), 2012, 42(Sup.1): 410-414. | |
| 5 | Fernandez-Moral E, Gonzalez-Jimenez J, Arevalo V. Extrinsic calibration of 2D laser rangefinders from perpendicular plane observations[J]. The International Journal of Robotics Research, 2015, 34(11): 1401-1417 |
| 6 | 罗赞丰. 基于多激光的行人目标跟踪[D]. 浙江: 浙江大学信息与电子工程学系, 2012. |
| Luo Zan-feng. Pedestrian tracking based on multiple laser scanners[D]. Zhejiang: School of Information and Electronic Engineering, Zhejiang University, 2012. | |
| 7 | Hu Z Z, Li Y C, Li N, et al. Extrinsic calibration of 2-D laser rangefinder and camera from single shot based on minimal solution[J]. IEEE Transactions on Instrumentation and Measurement, 2016, 65(4): 915-929. |
| 8 | Dylan F G, Takahiro M, Hiroshi I. Automatic position calibration and sensor displacement detection for network of laser range finders for human tracking[C]∥IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, Taiwan, 2010: 2938-2945. |
| 9 | Zhao H, Shibasaki R. A novel system for tracking pedestrians using multiple single-row laser-range scanners[J]. IEEE Transactions on Systems, Man, and Cybernetics-Part A: Systems and Humans, 2005, 35(2): 283-291. |
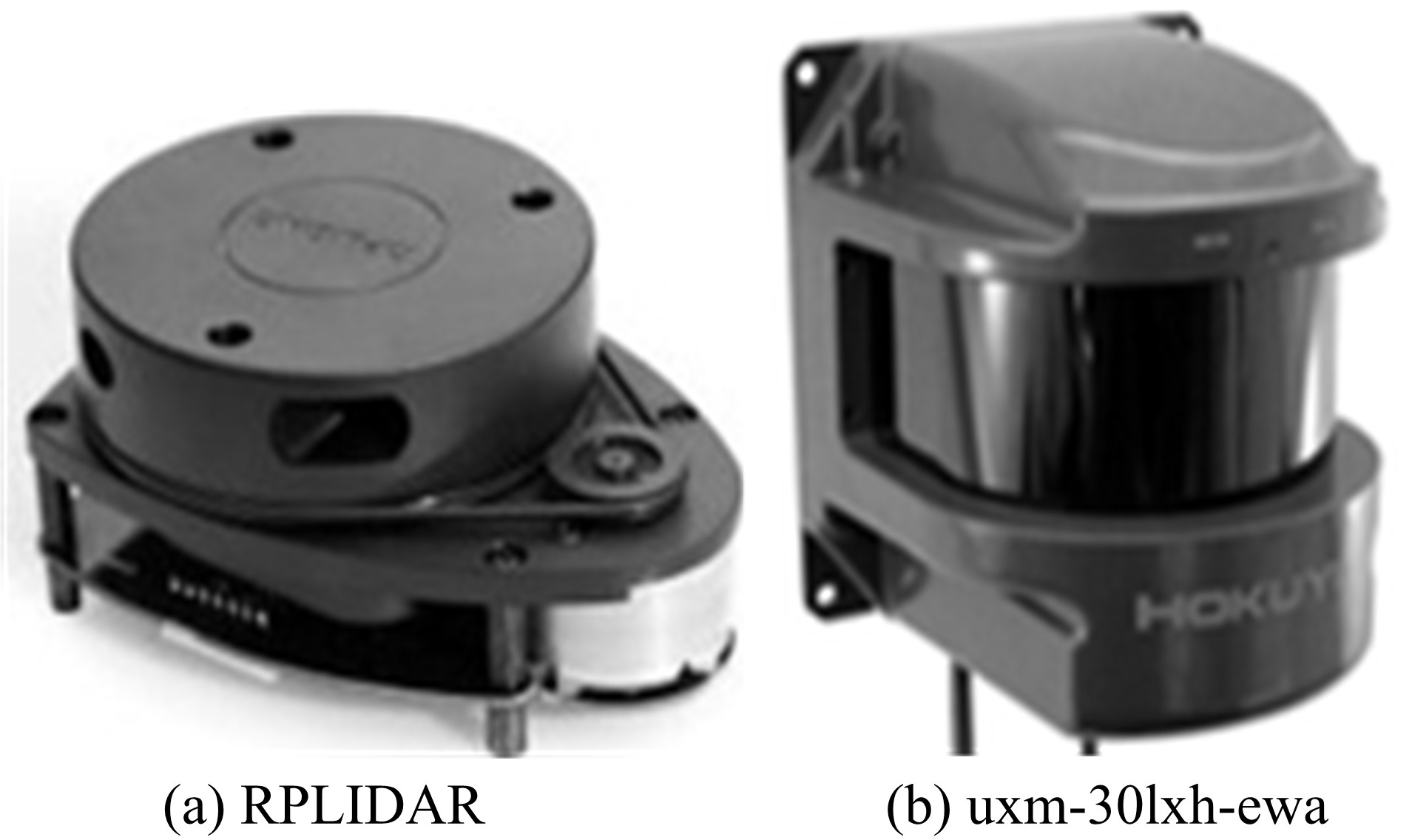
| 10 | 上海思岚科技有限公司. RPLIDAR A1低成本360度激光扫描测距雷达[EB/OL]. [2016-07-04]. |
| 11 | 北洋电机株式会社. Distance Data Output/UXM-30LXH-EWA[EB/OL]. [2018-10-18]. |
| 12 | Ramsey F. Understanding the basic of the kalman filter via a simple and intuitive derivation[J]. IEEE Signal Processing Magazine, 2012, 29(5): 128-132. |
| 13 | Martin E, Hans-Peter K, Joerg S, et al. A density-based algorithm for discovering clusters a density-based algorithm for discovering clusters in large spatial databases with noise[C]∥International Conference on Knowledge Discovery & Data Mining, Portland, Oregon, 1996: 226-231. |
| 14 | Golub G H, Van-Loan C F. Matrix Computation[M]. Maryland: Baltimore, Maryland: John Hopkins University Press, 1996. |
| 15 | Madsen K, Nielsen H B, Tingleff O. Methods for Non-linear Least Squares Problems Informatics and Mathematical Modeling[M]. Lyngby: Technical University of Denmark, DTU, 1999. |
| 16 | He K, Gkioxari G, Dollar P, et al. Mask R-CNN[C]∥2017 IEEE International Conference on Computer Vision(ICCV), Venice, Italy, 2017: 2980-2988. |
| 17 | Dalal N, Triggs B. Histograms of oriented gradients for human detection[C]∥2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition (CVPR’05), San Diego, USA, 2005: 886-893. |
| [1] | Peng ZHAO,Yu-zhong JIANG,Bin CHEN,Chun-teng LI,Yang-yong ZHANG. SLF channel noise suppression method based on adaptive blanking in local variance domain [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(5): 1696-1705. |
| [2] | LI Zhi-hui, HU Yong-li, ZHAO Yong-hua, MA Jia-lei, LI Hai-tao, ZHONG Tao, YANG Shao-hui. Locating moving pedestrian from running vehicle [J]. 吉林大学学报(工学版), 2018, 48(3): 694-703. |
| [3] | QU Zhao-wei, WEI Fu-lu, WEI Wei, LI Zhi-hui, HU Hong-yu. Pedestrian detection by radar vision data fusion [J]. 吉林大学学报(工学版), 2013, 43(05): 1230-1234. |
| [4] | LI Juan,SHAO Chun-fu,YANG Li-ya. Pedestrian detection based on improved Gaussian mixture model [J]. 吉林大学学报(工学版), 2011, 41(01): 41-0045. |
|
||