Journal of Jilin University(Engineering and Technology Edition) ›› 2021, Vol. 51 ›› Issue (4): 1518-1527.doi: 10.13229/j.cnki.jdxbgxb20200264
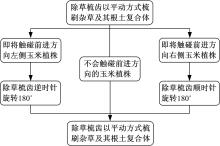
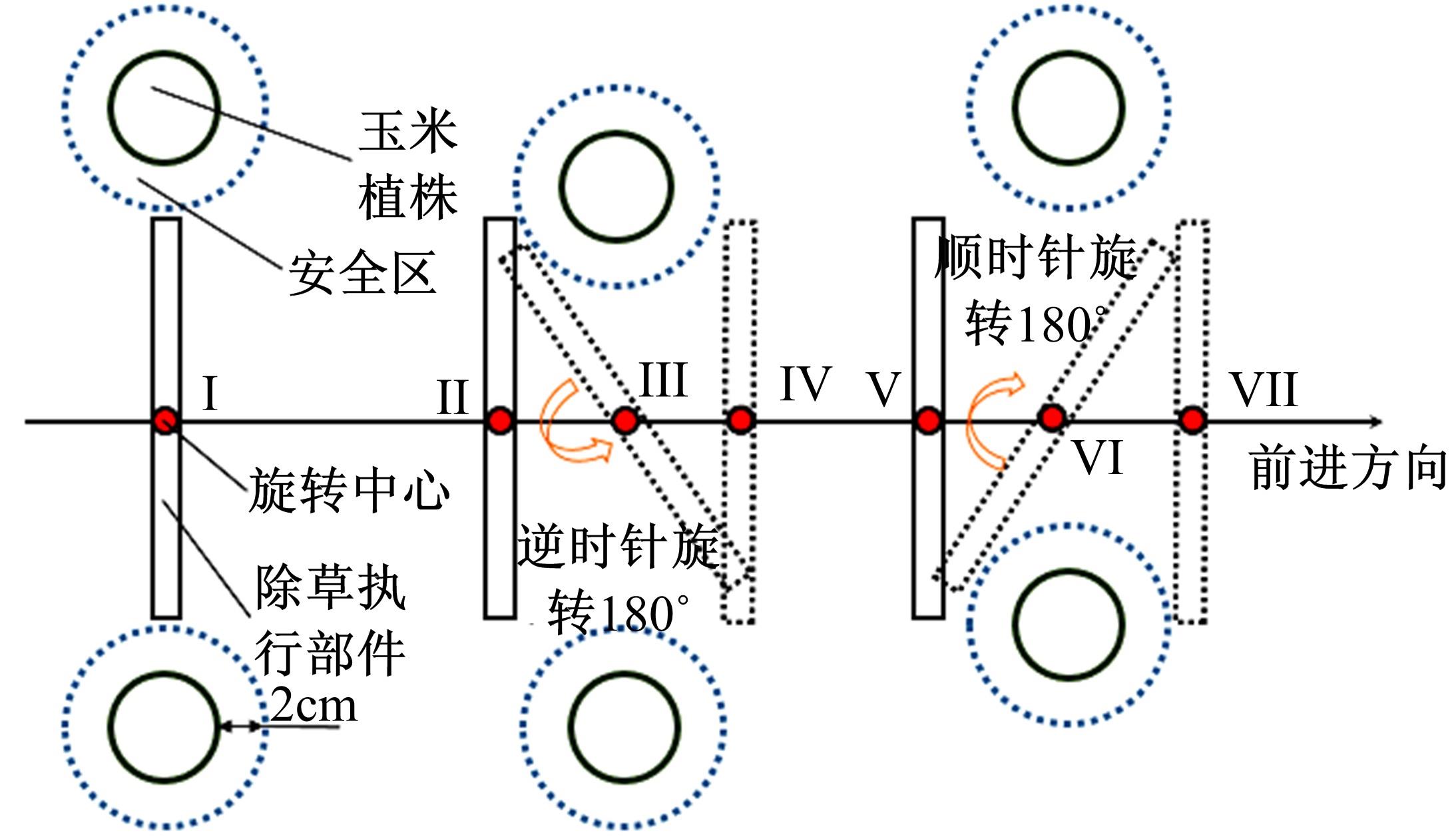
Design and experiment of touching-positioning weeding device for inter-row maize (Zea Mays L.)
Gang WANG1( ),Hui-li LIU1,Hong-lei JIA2(),Chun-jiang GUO1,Yong-jian CONG1,Ming-hao QU1
),Hui-li LIU1,Hong-lei JIA2(),Chun-jiang GUO1,Yong-jian CONG1,Ming-hao QU1
- 1.College of Biological and Agricultural Engineering,Jilin University,Changchun 130022,China
2.Key Laboratory of Bionic Engineering,Ministry of Education,Jilin University,Changchun 130022,China
CLC Number:
- S224.1










| 1 | Cordill C, Grift T E. Design and testing of an intra-row mechanical weeding machine for corn[J]. Biosystems Engineering, 2011, 110(3): 247-252. |
| 2 | van der Weide R Y, Bleeker P O, Achten V T J M, et al. Innovation in mechanical weed control in crop rows[J]. Weed Research, 2008, 48(3): 215-224. |
| 3 | 王洪昌, 涂鸣, 刘念, 等. 苗间除草机械末端执行装置研究现状[J]. 安徽农业科学, 2018, 46(17): 22-26, 29. |
| Wang Hong-chang, Tu Ming, Liu Nian, et al. Study status of the end-actuator of intra-row weeding machine[J]. Journal of Anhui Agricultural Sciences, 2018, 46(17): 22-26, 29. | |
| 4 | 李江国, 刘占良, 张晋国, 等. 国内外田间机械除草技术研究现状[J]. 农机化研究, 2006,28(10): 14-16. |
| Li Jiang-guo, Liu Zhan-liang, Zhang Jin-guo, et al. Review of mechanical weeding technique in field at home and abroad[J]. Journal of Agricultural Mechanization Research, 2006, 28(10): 14-16. | |
| 5 | van der Linden S, Mouazen A M, Anthonis J, et al. Infrared laser sensor for depth measurement to improve depth control in intra-row mechanical weeding[J]. Biosystems Engineering, 2008, 100(3): 309-320. |
| 6 | 孔汶汶. 基于高光谱成像技术的油菜除草剂胁迫诊断及生理信息检测研究[D]. 杭州: 浙江大学生物与系统工程学院, 2015. |
| Kong Wen-wen. Herbicide stress diagnosis and physiological information detection of Brassica napus using hyperspectral imaging technology[D]. Hangzhou:Collage of Biological and Systems Engineering, Zhejiang University, 2015. | |
| 7 | 刘慧力, 贾洪雷, 王刚, 等. 基于深度学习与图像处理的玉米秧苗茎秆识别方法与试验[J]. 农业机械学报, 2020, 51(4): 207-215. |
| Liu Hui-li, Jia Hong-lei, Wang Gang, et al. Methods and experiments of maize (Zea Mays. L.) stems recognition based on deep learning and image processing[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(4): 207-215. | |
| 8 | Pannacci E, Tei F, Guiducci M. Mechanical weed control in organic winter wheat[J]. Italian Journal of Agronomy, 2017, 12(4): 336-342. |
| 9 | 张贺, 张喆. 田间除草机械刀具关键技术与装置分析[J]. 农业技术与装备, 2019, 35(11): 90,92. |
| Zhang He, Zhang Zhe. Key technology and device of the cutting tool of the field weeding machine[J]. Agricultural Technology & Equipment, 2019,35(11): 90,92. | |
| 10 | 王洪昌. 基于鼢鼠爪趾几何结构特征的苗间仿生除草铲设计[D]. 长春:吉林大学生物与农业工程学院, 2015. |
| Wang Hong-chang. Design of intra-row bionic weeding blade based on geometric characteristic of claws of Myospalax[D]. Changchun: College of Biological and Agricultural Engineering,Jilin University, 2015. | |
| 11 | Gobor Z, Lammers P S, Martinov M. Development of a mechatronic intra-row weeding system with rotational hoeing tools: theoretical approach and simulation[J]. Computers and Electronics in Agriculture, 2013, 98: 166-174. |
| 12 | Cirujeda A, Aibar J, Moreno M M, et al. Effective mechanical weed control in processing tomato: Seven years of results[J]. Renewable Agriculture and Food Systems, 2015, 30(3): 223-232. |
| 13 | Fogelberg, Gustavsson. Mechanical damage to annual weeds and carrots by in-row brush weeding[J]. Weed Research, 1999, 39(6): 469-479. |
| 14 | Melander B. Optimization of the Adjustment of a Vertical Axis Rotary Brush Weeder for Intra-Row Weed Control in Row Crops[J]. Journal of Agricultural Engineering Research, 1997, 68(1): 39-50. |
| 15 | Peruzzi A, Martelloni L, Frasconi C, et al. Machines for non-chemical intra-row weed control in narrow and wide-row crops: a review[J]. Journal of Agricultural Engineering, 2017, 48(2): 57-70. |
| 16 | 王金峰, 王金武, 闫东伟, 等. 3SCJ-2型水田行间除草机设计与试验[J]. 农业机械学报, 2017, 48(6): 71-78, 202. |
| Wang Jin-feng, Wang Jin-wu, Yan Dong-wei, et al. Design and experiment of 3scj-2 type row weeding machine for paddy field[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(6): 71-78, 202. | |
| 17 | Melander B, Jabran K, de Notaris C, et al. Inter-row hoeing for weed control in organic spring cereals-Influence of inter-row spacing and nitrogen rate[J]. European Journal of Agronomy, 2018, 101: 49-56. |
| 18 | Pérez-Ruíz M, Slaughter D C, Fathallah F A, et al. Co-robotic intra-row weed control system[J]. Biosystems Engineering, 2014, 126: 45-55. |
| 19 | 周福君, 王文明, 李小利, 等. 凸轮摇杆式摆动型玉米株间除草装置设计与试验[J]. 农业机械学报, 2018, 49(1): 77-85. |
| Zhou Fu-jun, Wang Wen-ming, Li Xiao-li, et al. Design and experiment of the cam rocker swing intra-row weeding device for maize[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(1): 77-85. | |
| 20 | 牛春亮, 王金武. 稻田株间除草部件工作机理及除草轨迹试验[J]. 农机化研究, 2017, 39(1): 177-181. |
| Niu Chun-liang, Wang Jin-wu. Paddy strains between weeding member working mechanism and weeding track test[J]. Journal of Agricultural Mechanization Research, 2017, 39(1): 177-181. | |
| 21 | 胡炼, 罗锡文, 严乙桉, 等. 基于爪齿余摆运动的株间机械除草装置研制与试验[J]. 农业工程学报, 2012, 28(14): 10-16. |
| Hu Lian, Luo Xi-wen, Yan Yi-an, et al. Development and experiment of intra-row mechanical weeding device based on trochoid motion of claw tooth[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(14): 10-16. | |
| 22 | 李森森. 中耕期玉米田间避苗除草装置设计及试验研究[D]. 长春: 吉林大学生物与农业工程学院, 2019. |
| Li Sen-sen. Design and experiment of seedling avoidable weeding control device for intertillage maize[D]. Changchun: College of Biological and Agricultural Engineering,Jilin University, 2019. | |
| 23 | 贾洪雷, 李森森, 王刚, 等. 中耕期玉米田间避苗除草装置设计与试验[J]. 农业工程学报, 2018, 34(7): 15-22. |
| Jia Hong-lei, Li Sen-sen, Wang Gang, et al. Design and experiment of seedling avoidable weeding control device for intertillage maize (Zea Mays L.)[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2018, 34(7): 15-22. | |
| 24 | 陈其本. 玉米田间杂草及其防除策略[J]. 云南农业科技, 1983, 12(3): 22-26. |
| Chen Qi-ben. Weeds and their control strategies in maize field[J]. Agricultural Science and Technology of Yunnan, 1983, 12(3): 22-26. | |
| 25 | Duerinckx K, Mouazen A M, Anthonis J, et al. Effects of spring-tine settings and operational conditions on the mechanical performance of a weed harrow tine[J]. Biosystems Engineering, 2005, 91(1): 21-34. |
| 26 | Gealy D, Moldenhauer K, Duke S. Root Distribution and Potential Interactions Between Allelopathic Rice, Sprangletop (Leptochloa spp.), and Barnyardgrass (Echinochloa crus-galli) based on C-13 Isotope Discrimination Analysis[J]. Journal of Chemical Ecology, 2013, 39(2): 186-203. |
| 27 | 韩豹, 郭畅, 高英玲, 等. 大豆株间除草单体机构及关键部件设计与试验[J]. 农业机械学报, 2020, 51(6): 112-121. |
| Han Bao, Guo Chang, Gao Ying-ling, et al. Design and experiment of soybean intra-row weeding monomer mechanism and key components[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(6):112-121. | |
| 28 | Kurstjens D A G, Kropff M J, Perdok U D. Method for predicting selective uprooting by mechanical weeders from plant anchorage forces[J]. Weed Science, 2004, 52(1): 123-132. |
| 29 | Wang J, Tao G, Liu Y, et al. Field experimental study on pullout forces of rice seedlings and barnyard grasses for mechanical weed control in paddy field[J]. International Journal of Agricultural and Biological Engineering, 2014, 7(6): 1-7. |
| 30 | Velicka R, Mockeviciene R, Marcinkeviciene A, et al. The effect of non-chemical weed control on soil biological properties in a spring oilseed rape crop[J]. Zemdirbyste-agriculture, 2017, 104(2): 107-114. |
| 31 | Bastiene N, Saulys V, Ciuberkis S. The spread of field horsetail (Equisetum arvense L.) in drained areas of Lithuania: reasons and consequences, and possibilities for its control[J]. Acta Agriculturae Scandinavica Section B-Soil and Plant Science, 2006, 56(1): 25-30. |
| [1] | Xue-shen CHEN,Tao CHEN,Tao WU,Xu MA,Ling-chao ZENG,Lin-tao CHEN. Design and experiment on harvester for winter planting potato of straw coverage [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 749-757. |
| [2] | QI Long, LIANG Zhong-wei, JIANG Yu, MA Xu, WU Tao, LU Yu-long, ZHAO Liu-lin. Design and field test of lightweight paddy weeder [J]. 吉林大学学报(工学版), 2016, 46(3): 1004-1012. |
| [3] | QI Long, LIAO Wen-qiang, MA Xu, LIN Jian-heng, OU Zhi-xing, ZHAN Zhi-xun. Design and testing of control system of mini-weeding-robot platform in rice paddy field [J]. 吉林大学学报(工学版), 2013, 43(04): 991-996. |
| [4] | HAN Bao,WU Wen-fu,QUAN Long-zhe. Multi-objective optimization design and simulation on horizontal disk type weeding unit between seedlings [J]. 吉林大学学报(工学版), 2011, 41(03): 692-696. |
|
||