Journal of Jilin University(Engineering and Technology Edition) ›› 2023, Vol. 53 ›› Issue (2): 584-592.doi: 10.13229/j.cnki.jdxbgxb20210618
Previous Articles Next Articles
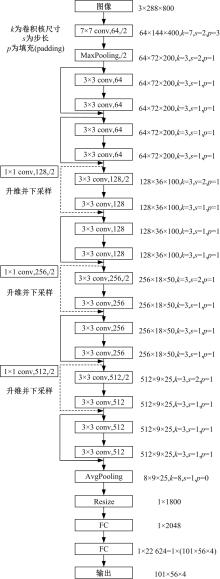
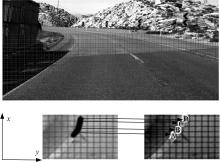
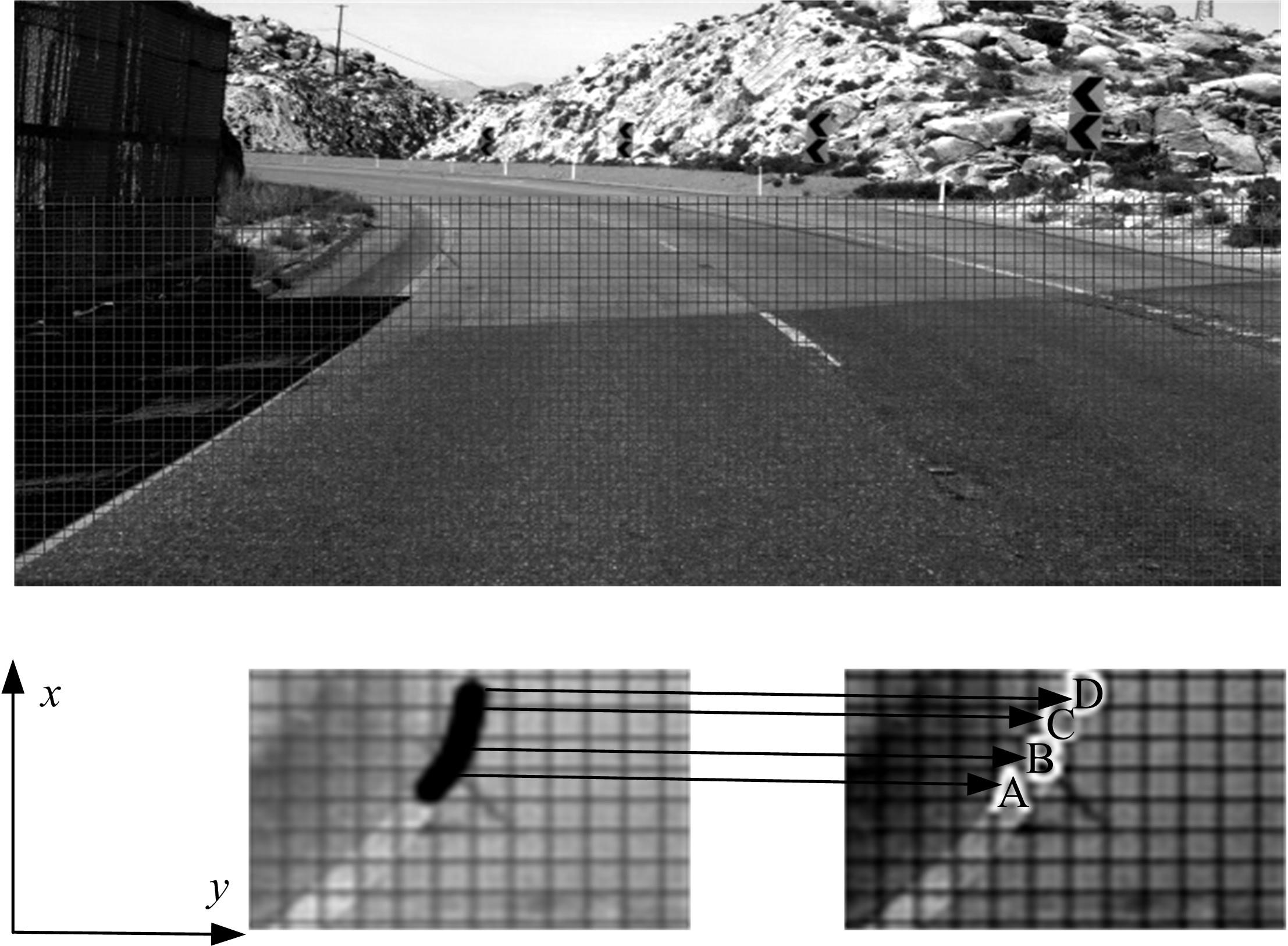
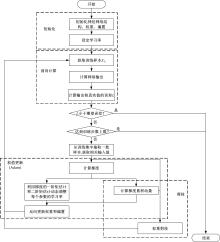
Residual network based curve enhanced lane detection method
Xiao-hu SHI1,2( ),Jia-qi WU1,Chun-guo WU1,2,Shi CHENG1,Xiao-hui WENG3,Zhi-yong CHANG4,5()
),Jia-qi WU1,Chun-guo WU1,2,Shi CHENG1,Xiao-hui WENG3,Zhi-yong CHANG4,5()
- 1.College of Computer Science and Technology,Jilin University,Changchun 130012,China
2.Key Laboratory of Symbol Computation and Knowledge Engineering of Ministry of Education,Jilin University,Changchun 130012,China
3.School of Mechanical and Aerospace Engineering,Jilin University,Changchun 130022,China
4.College of Biological and Agricultural Engineering,Jilin University,Changchun 130022,China
5.Key Laboratory of Bionic Engineering of Ministry of Education,Jilin University,Changchun 130022,China
CLC Number:
- TP391.4






| 1 | Xu Z, Shin B, Klette R. Accurate and robust line segment extraction using minimum entropy with hough transform[J]. IEEE Transactions Image Process, 2015, 24(3): 813-822. |
| 2 | Hillel A B, Lerner R, Levi D, et al. Recent progress in road and lane detection: a survey[J]. Machine Vision and Applications, 2014, 25(3): 727-745. |
| 3 | Lookingbill A, Rogers J, Lieb D, et al. Reverse optical flow for self-supervised adaptive autonomous robot navigation[J]. International Journal of Computer Vision, 2007, 74(3): 287-302. |
| 4 | Li X Y, Fang X Z, Wang C, et al. Lane detection and tracking using a parallel-snake approach[J]. Journal of Intelligent & Robotic Systems, 2015, 77(3): 597-609. |
| 5 | Borkar A, Hayes M, Smith M T. Polar randomized hough transform for lane detection using loose constraints of parallel lines[C]∥IEEE International Conference on Acoustics, Speech and Signal Processing, Prague, Czech Republic, 2011: 1037-1040. |
| 6 | Lee C, Moon J H. Robust lane detection and tracking for real-time applications[J]. IEEE Transactions on Intelligent Transportation Systems, 2018, 19(12): 4043-4048. |
| 7 | Suddamalla U, Kundu S, Farkade S, et al. A novel algorithm of lane detection addressing varied scenarios of curved and dashed lanemarks[C] ∥International Conference on Image Processing Theory, Tools and Applications, Orléans, France, 2015: 87-92. |
| 8 | 贾阳, 王荣本, 余天洪, 等. 基于熵最大化边缘提取的直线型车道标识线识别及跟踪方法[J]. 吉林大学学报: 工学版, 2005, 35(4): 420-425. |
| Jia Yang, Wang Rong-ben, Yu Tian-hong, et al. Linear lane mark identification and track method based on entropy maximization edge extraction[J]. Journal of Jilin University (Engineering and Technology Edition), 2005, 35(4): 420-425. | |
| 9 | Jung C R, Kelber C R. An improved linear-parabolic model for lane following and curve detection[C]∥XVIII Brazilian Symposium on Computer Graphics and Image Processing, Natal, Brazil, 2005: 131-138. |
| 10 | 吴骅跃, 段里仁. 基于RGB熵和改进区域生长的非结构化道路识别方法[J]. 吉林大学学报: 工学版, 2019, 49(3): 727-735. |
| Wu Hua-yue, Duan Li-ren. Unstructured road detection method based on RGB entropy and improved region growing[J]. Journal of Jilin University (Engineering and Technology Edition), 2019, 49(3): 727-735. | |
| 11 | Huval B, Wang T, Tandon S, et al. An empirical evaluation of deep learning on highway driving[J/OL]. [2015-04-17]. |
| 12 | Gurghian A, Koduri T, Bailur S V, et al. Deeplanes: end-to-end lane position estimation using deep neural networks[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition Workshops, Las Vegas, USA, 2016: 38-45. |
| 13 | He B, Ai R, Yan Y, et al. Accurate and robust lane detection based on dual-view convolutional neutral network[C]∥IEEE Intelligent Vehicles Symposium, Gothenburg, Sweden, 2016: 1041-1046. |
| 14 | Pan X, Shi J, Luo P, et al. Spatial as deep: spatial cnn for traffic scene understanding[J/OL]. [2017-12-17]. |
| 15 | Philion J. FastDraw: Addressing the long tail of lane detection by adapting a sequential prediction network[C]∥Conference on Computer Vision and Pattern Recognition, Long Beach, USA, 2019: 11574-11583. |
| 16 | Khan H U, Ali A R, Hassan A, et al. Lane detection using lane boundary marker network with road geometry constraints[C]∥IEEE Winter Conference on Applications of Computer Vision, Snowmass Village, USA, 2020: 1823-1832. |
| 17 | Qin Z, Wang H, Li X. Ultra fast structure-aware deep lane detection[J/OL]. [2020-08-05]. |
| 18 | He K, Zhang X, Ren S, et al. Deep residual learning for image recognition[C]∥Proceedings of the IEEE Conference on Computer Vision and Pattern Recognition, Las Vegas, USA, 2016: 770-778. |
| 19 | Dettmers T, Zettlemoyer L. Sparse networks from scratch: faster training without losing performance[J/OL]. [2019-08-23]. |
| 20 | Kingma D P, Ba J. Adam: a method for stochastic optimization[J/OL]. [2017-01-30]. |
| [1] | Huai-jiang YANG,Er-shuai WANG,Yong-xin SUI,Feng YAN,Yue ZHOU. Simplified residual structure and fast deep residual networks [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(6): 1413-1421. |
| [2] | Shao-jiang DONG,Peng ZHU,Xue-wu PEI,Yang LI,Xiao-lin HU. Fault diagnosis of rolling bearing under variable operating conditions based on subdomain adaptation [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(2): 288-295. |
| [3] | Jie CAO,Jia-lin MA,Dai-lin HUANG,Ping YU. A fault diagnosis method based on multi Markov transition field [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(2): 491-496. |
| [4] | Sheng-sheng WANG,Chen-xu LI,Xiang-yu WANG,Zhi-lin YAO,Yi-shen LIU,Jia-qian WU,Qing-ran YANG. Brain tumor image classification based on improved residual capsule network and sparrow search [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(11): 2653-2661. |
| [5] | Jie CAO,Zhi-Dong HE,Ping YU,Jin-hua WANG. Bearing fault diagnosis method under unbalanced data distribution [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(11): 2523-2531. |
| [6] | Xue-yun CHEN,Tao XU,Xiao-qiao HUANG. Detection method of medical cell image generation based on conditional generative adversarial network [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(4): 1414-1419. |
| [7] | Hong-wei ZHAO,Peng WANG,Li-li FAN,Huang-shui HU,Ping-ping LIU. Similarity retention instance retrieval method [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(6): 2045-2050. |
| [8] | Zi-ji MA,Hao LU,Yan-ru DONG. Dual path convolutional neural network forsingle image super⁃resolution [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(6): 2089-2097. |
| [9] | ZHAO Hong-wei, LIU Yu-qi, DONG Li-yan, WANG Yu, LIU Pei. Dynamic route optimization algorithm based on hybrid in ITS [J]. 吉林大学学报(工学版), 2018, 48(4): 1214-1223. |
| [10] | WANG Hong-mei, DANG Yuan-yuan, HU Ming, LIU Da-you. Frequent itemsets mining algorithm based on sort tree [J]. 吉林大学学报(工学版), 2016, 46(4): 1216-1221. |
| [11] | QIN Chuan-dong, LIU San-yang. Tumor gene selection based on double regularized support vector machine [J]. 吉林大学学报(工学版), 2013, 43(01): 192-197. |
|