Journal of Jilin University(Engineering and Technology Edition) ›› 2023, Vol. 53 ›› Issue (2): 405-412.doi: 10.13229/j.cnki.jdxbgxb20210680
Previous Articles Next Articles
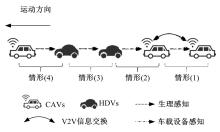
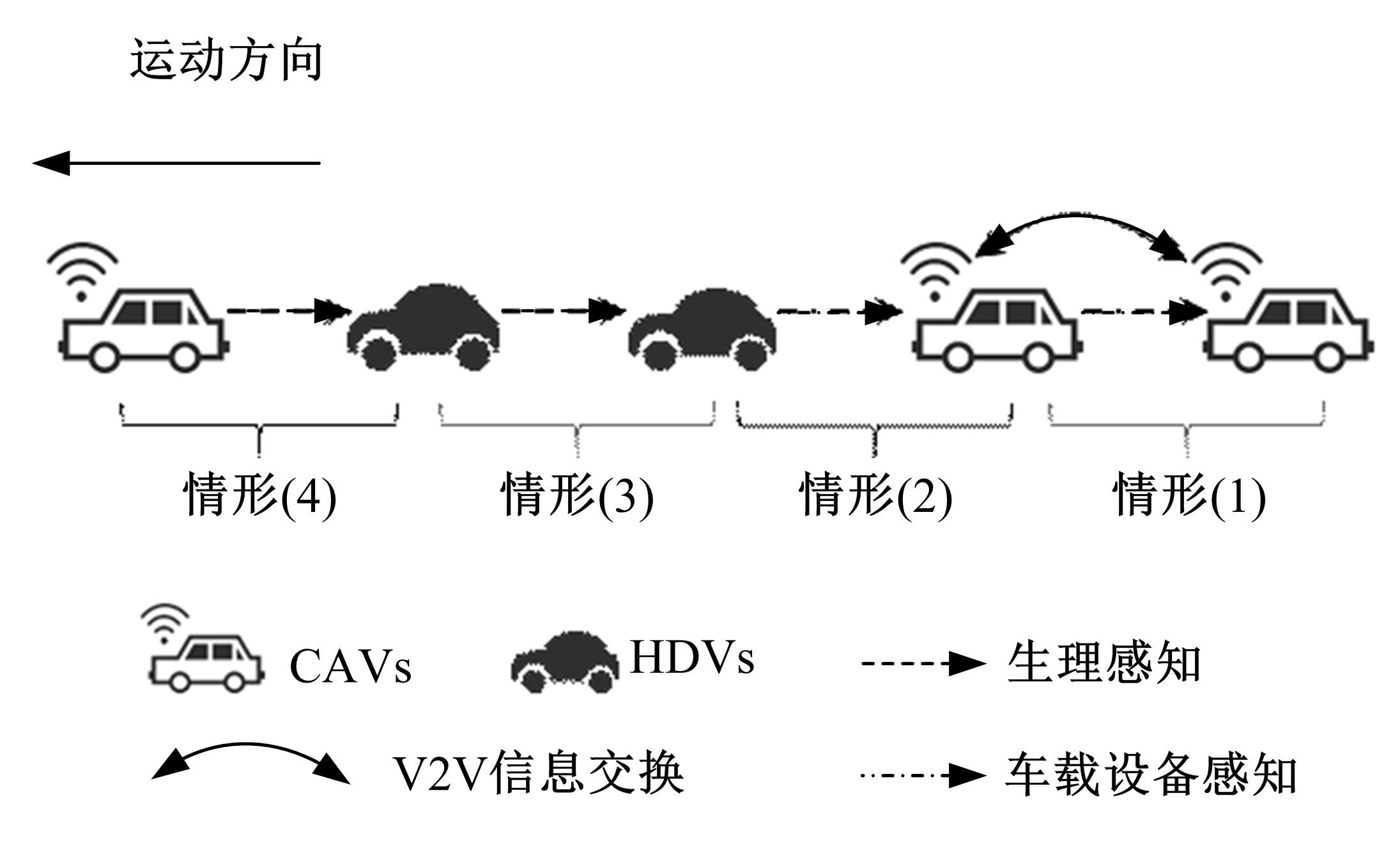
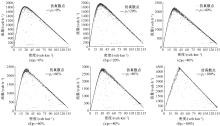
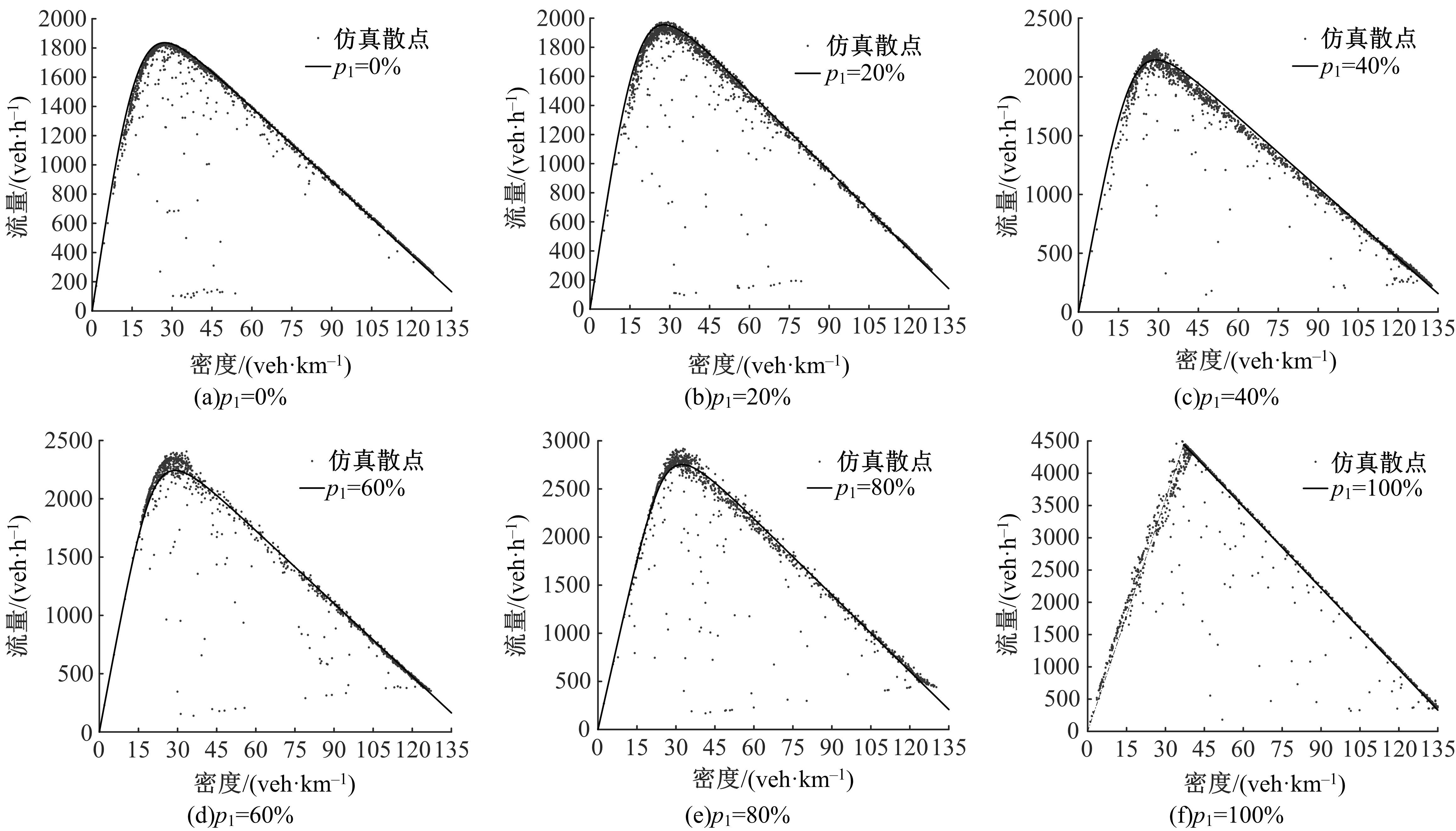
Fundamental diagram model of mixed traffic flow of connected and automated vehicles considering vehicles degradations and platooning intensity
Rui-fa LUO1( ),Hui-jun HAO2,Tao-rang XU2,Qiu-fan GU2
),Hui-jun HAO2,Tao-rang XU2,Qiu-fan GU2
- 1.Key Laboratory of Road and Traffic Engineering,Ministry of Education,Tongji University,Shanghai 201804,China
2.School of Transportation and Logistics,Southwest Jiaotong University,Chengdu 610031,China
CLC Number:
- U463.6



| 1 | 刘爽, 吴韶波. V2X车联网关键技术及应用[J]. 物联网技术, 2018, 8(10): 39-40, 43. |
| Liu Shuang, Wu Shao-bo. Key technologies and applications of V2X internet of vehicles [J]. Internet of Things Technology, 2018, 8(10): 39-40, 43. | |
| 2 | Bansal P, Kockelman K M. Forecasting Americans' long-term adoption of connected and autonomous vehicle technologies[J]. Transportation Research, Part A: Policy and Practice, 2017, 95(1): 49-63. |
| 3 | Calvert S C A, Schakel W J, Lint J W C V. Will automated vehicles negatively impact traffic flow?[J]. Journal of Advanced Transportation,2017, 2017: 3082781. |
| 4 | Talebpour A, Mahmassani H S. Influence of connected and autonomous vehicles on traffic flow stability and throughput[J]. Transportation Research, Part C: Emerging Technologies, 2016, 71: 143-163. |
| 5 | Ye L, Yamamoto T.Modeling connected and autonomous vehicles in heterogeneous traffic flow[J]. Physica A: Statistical Mechanics and its Applications, 2018, 490: 269-277. |
| 6 | Yao Z, Hu R, Wang Y, et al. Stability analysis and the fundamental diagram for mixed connected automated and human-driven vehicles[J]. Physica A: Statistical Mechanics and its Applications, 2019, 533: 121931. |
| 7 | Wang M, Treiber M, Daamen W, et al. Modelling supported driving as an optimal control cycle: framework and model characteristics[J]. Transportation Research, Part C: Emerging Technologies, 2013, 36: 547-563. |
| 8 | 秦严严, 王昊, 王炜, 等. 混有协同自适应巡航控制车辆的异质交通流稳定性解析与基本图模型[J]. 物理学报, 2017, 66(9): 257-265. |
| Qin Yan-yan, Wang Hao, Wang Wei, et al. Heterogeneous traffic flow stability analysis and fundamental diagram model of mixed adaptive cruise control vehicles[J]. The Physica Journal, 2017, 66(9): 257-265. | |
| 9 | Zhou J, Zhu F. Modeling the fundamental diagram of mixed human-driven and connected automated vehicles-ScienceDirect[J]. Transportation Research, Part C: Emerging Technologies, 2020, 115: 102614. |
| 10 | 秦严严, 王昊, 王炜, 等. 混有CACC车辆和ACC车辆的异质交通流基本图模型[J]. 中国公路学报, 2017, 30(10): 127-136. |
| Qin Yan-yan, Wang Hao, Wang Wei, et al. Fundamental diagram model of heterogeneous traffic flow mixed with cooperative adaptive cruise control vehicles and adaptive cruise control vehicles[J]. China Journal of Highway and Transport, 2017, 30(10): 127-136. | |
| 11 | 常鑫, 李海舰, 荣建, 等. 混有智能网联车队的交通流基本图模型分析[J]. 东南大学学报: 自然科学版, 2020, 50(4): 782-788. |
| Chang Xin, Li Hai-jian, Rong Jian, et al. Analysis on fundamental diagram model for mixed traffic flow with connected vehicle platoons[J]. Journal of Southeast University(Natural Science Edition), 2020, 50(4): 782-788. | |
| 12 | Levin M W, Boyles S D. A multiclass cell transmission model for shared human and autonomous vehicle roads[J]. Transportation Research, Part C: Emerging Technologies, 2016, 62: 103-116. |
| 13 | 徐桃让, 姚志洪, 蒋阳升, 等. 智能网联车环境下考虑反应时间影响的基本图模型[J]. 公路交通科技, 2020, 37(8): 108-117. |
| Xu Tao-rang, Yao Zhi-hong, Jiang Yang-sheng, et al. The fundamental diagram model considering the influence of reaction time of mixed traffic flow of connected and automated vehicles[J]. Journal of Highway and Transportation Research and Development, 2020, 37(8): 108-117. | |
| 14 | Baskar L D, Schutter B D, Hellendoorn J. Optimal routing for intelligent vehicle highway systems using a macroscopic traffic flow model[C]∥International IEEE Conference on Intelligent Transportation Systems, St.Louis, USA, 2009: 10964900. |
| 15 | 秦严严,王昊.自动驾驶车辆交通流基本图与驾驶舒适性[C]∥第十三届中国智能交通年会大会论文集, 天津, 中国, 2018: 280-288. |
| 16 | Bose A, Ioannou P. Mixed manual/semi-automated traffic: a macroscopic analysis[J]. Transportation Research, Part C: Emerging Technologies, 2003, 11(6): 439-462. |
| 17 | Ghiasi A, Hussain O, Qian Z S, et al. A mixed traffic capacity analysis and lane management model for connected automated vehicles: a Markov chain method[J]. Transportation Research, Part B: Methodological, 2017, 106(11): 266-292. |
| 18 | Xie D, Zhao X, He Z. Heterogeneous traffic mixing regular and connected vehicles: modeling and stabilization[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(6): 2060-2071. |
| 19 | Jia D, Ngoduy D, Vu H L. A multiclass microscopic model for heterogeneous platoon with vehicle-to-vehicle communication[J].Transportmetrica B,2019,7(1): 448-472. |
| 20 | Milanes V, Shladover S E, Spring J, et al. Cooperative adaptive cruise control in real traffic situations[J]. IEEE Transactions on Intelligent Transportation Systems, 2014, 15(1): 296-305. |
| 21 | Shladover S, Su D, Lu X Y. Impacts of cooperative adaptive cruise control on freeway traffic flow[J]. Transportation Research Record Journal of the Transportation Research Board, 2012(2324): 63-70. |
| 22 | Zheng F F, Liu C, Liu X B, et al. Analyzing the impact of automated vehicles on uncertainty and stability of the mixed traffic flow-science direct[J].Transportation Research, Part C: Emerging Technologies, 2020, 112: 203-219. |
| 23 | 杨顺,蒋渊德,吴坚,等.基于多类型传感数据的自动驾驶深度强化学习方法[J].吉林大学学报:工学版, 2019, 49(4): 1026-1033. |
| Yang Shun, Jiang Yuan-de, Wu Jian, et al. Autonomous driving policy learning based on deep reinforcement learning and multi-type sensor data[J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(4): 1026-1033. | |
| 24 | 贾彦峰, 曲大义, 林璐, 等. 基于运行轨迹的网联混合车流速度协调控制[J]. 吉林大学学报: 工学版, 2021, 51(6): 2051-2060. |
| Jia Yan-feng, Qu Da-yi, Lin Lu, et al. Coordinated speed control of connected mixed traffic flow based on trajectory[J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2051-2060. |
| [1] | Yan-feng JIA,Da-yi QU,Lu LIN,Rong-han YAO,Xiao-long MA. Coordinated speed control of connected mixed traffic flow based on trajectory [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2051-2060. |
| [2] | WANG Zhan-zhong, ZHAO Li-ying, JIAO Yu-Ling, CAO Ning-bo. Social force model of pedestrian-bike mixed flow at signalized crosswalk [J]. 吉林大学学报(工学版), 2018, 48(1): 89-97. |
| [3] | WEI Li-ying,WU Rong-hua,WANG Zhi-long,ZHU Jian-hui. Lane-changing behavior based on mixed traffic flow [J]. 吉林大学学报(工学版), 2014, 44(5): 1321-1326. |
| [4] | WEI Wei, LI Zhi-hui, ZHAO Yong-hua, QU Zhao-wei, JIANG Sheng, CHAI Ting-ting. Developing a smart camera for mixed traffic flow detection [J]. 吉林大学学报(工学版), 2013, 43(04): 866-870. |
| [5] | JIANG Sheng, WANG Dian-hai, ZHAO Ying-ying, WEI Wei. Recombination algorithm for mixed traffic flow foreground Abstracting [J]. 吉林大学学报(工学版), 2011, 41(增刊1): 76-80. |
|