Journal of Jilin University(Engineering and Technology Edition) ›› 2023, Vol. 53 ›› Issue (3): 933-940.doi: 10.13229/j.cnki.jdxbgxb20221057
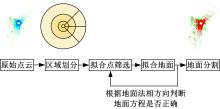
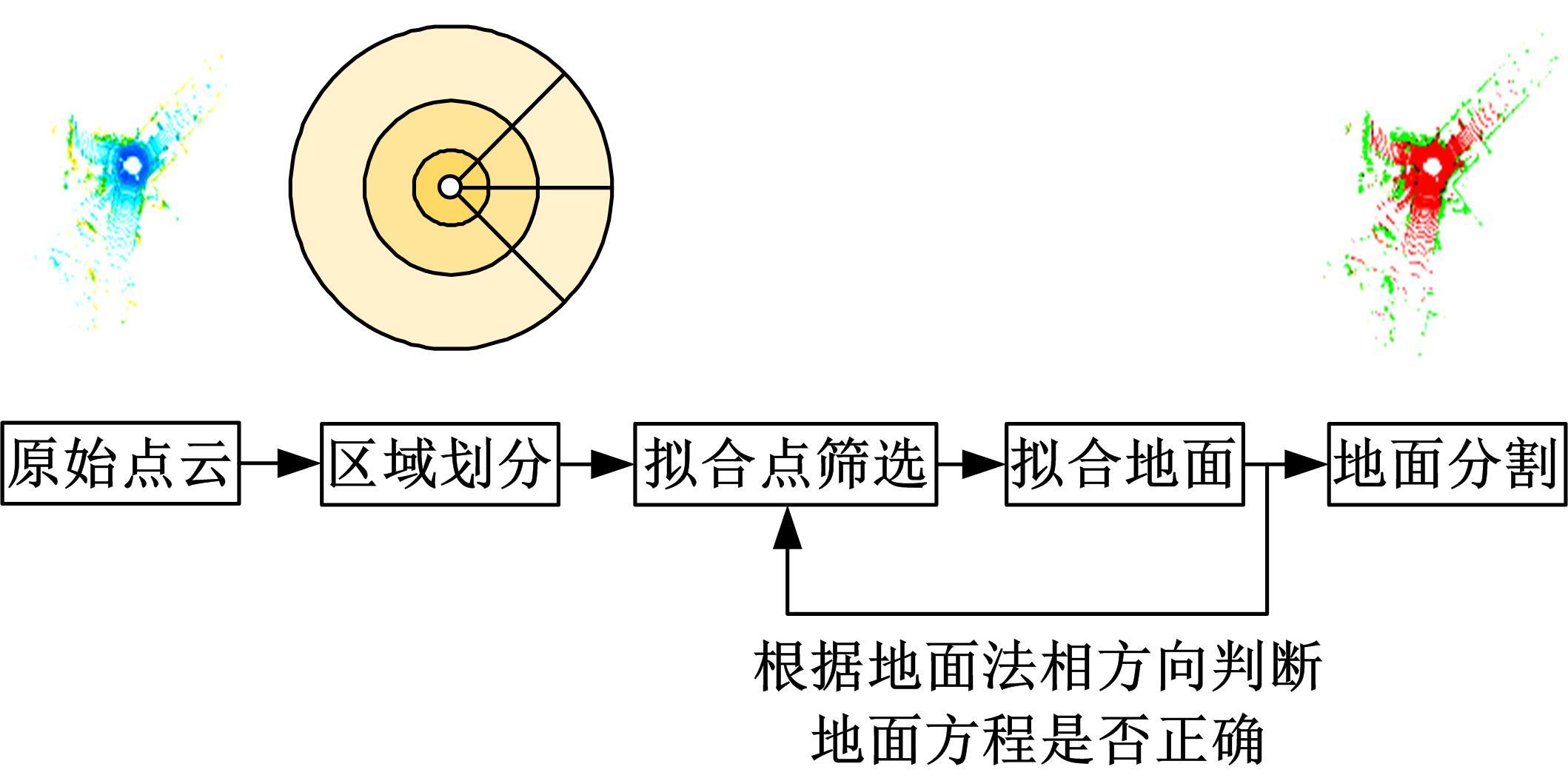
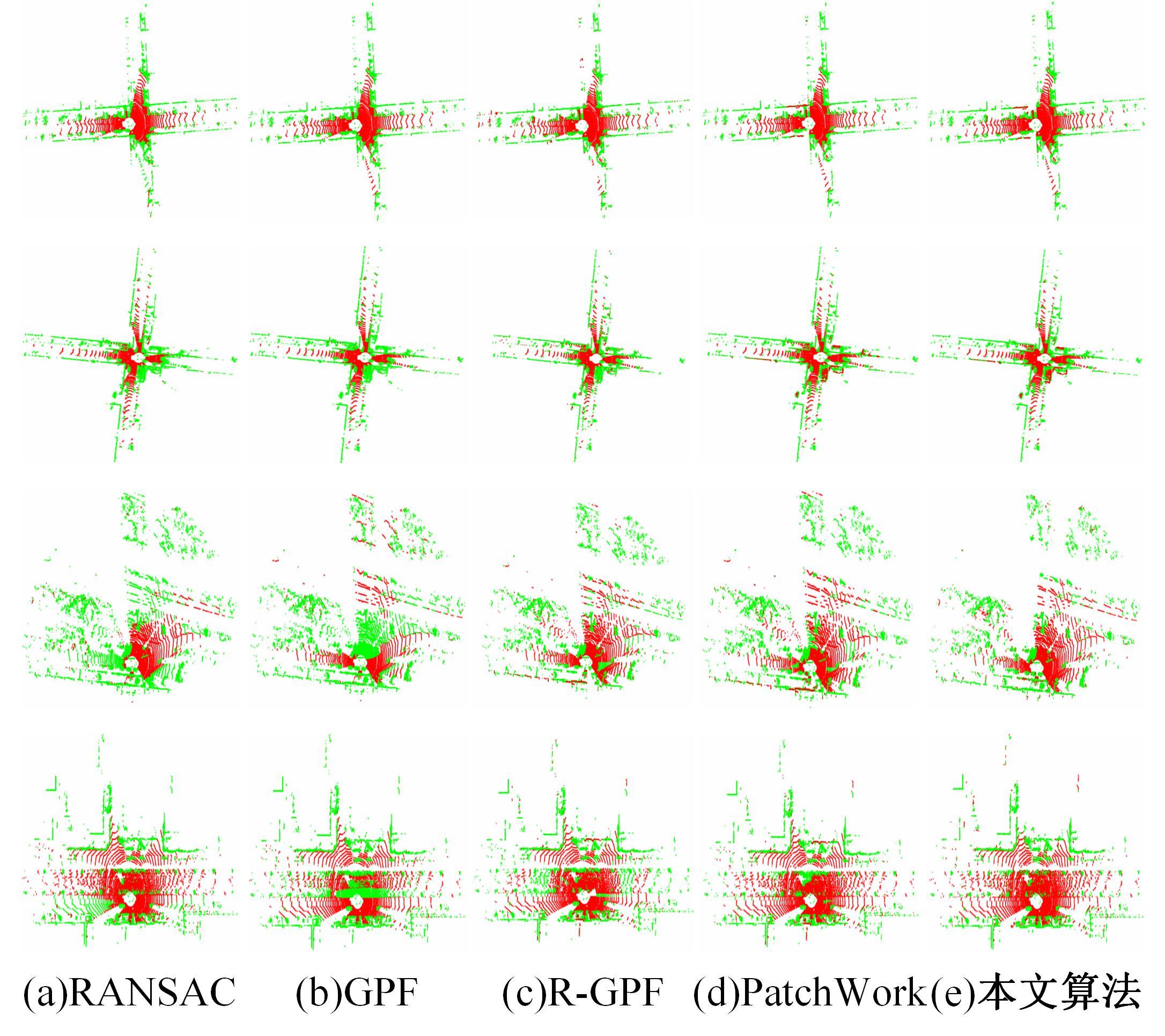
Accurate segmentation method of ground point cloud based on plane fitting
Chun-yang WANG1,2( ),Wen-qian QIU2,Xue-lian LIU1(),Bo XIAO3,Chun-hao SHI2
),Wen-qian QIU2,Xue-lian LIU1(),Bo XIAO3,Chun-hao SHI2
- 1.Xi'an Key Laboratory of Active Photoelectric Imaging Detection Technology,Xi'an Technological University,Xi'an 710021,China
2.College of Electronic and Information Engineering,Changchun University of Science and Technology,Changchun 130022,China
3.School of Optoelectronic Engineering,Xi'an Technological University,Xi'an 710021,China
CLC Number:
- TN911.7
















| 1 | 曾昊旻,李松,张智宇,等.车载激光雷达Risley棱镜光束扫描系统[J]. 光学精密工程, 2019, 27(7):1444-1450. |
| Zeng Hao-min, Li Song, Zhang Zhi-yu, et al. Risley-prism-based beam scanning system for mobile lidar[J]. Optics and Precision Engineering, 2019, 27(7):1444-1450. | |
| 2 | Douillard B, Underwood J, Kuntz N, et al. On the segmentation of 3DLIDAR point clouds[C]∥2011 IEEE International Conference on Robotics and Automation, Shanghai,China,2011:2798-2805. |
| 3 | Byun J, Na K I, Seo B S, et al. Drivable road detection with 3D point clouds based on the MRF for intelligent vehicle[J]. Springer Tracts in Advanced Robotics, 2015, 105: 49-60. |
| 4 | Asvadi A, Peixoto P, Nunes U . et al . Detection and tracking of moving objects using 2.5D motion grids[C]∥2015 IEEE 18th International Conference on Intelligent Transportation Systems, Gran Canaria,Spain,2015: 788-793. |
| 5 | 张名芳,付锐,郭应时,等. 基于三维不规则点云的地面分割算法[J].吉林大学学报:工学版,2017,47(5):1387-1394. |
| Zhang Ming-fang, Fu Rui, Guo Ying-shi, et al. Road segmentation method based on irregular three dimensional point cloud[J]. Journal of Jilin University(Engineering and Technology Edition), 2017, 47(5): 1387-1394. | |
| 6 | 伍锡如,薛其威. 基于激光雷达的无人驾驶系统三维车辆检测[J]. 光学精密工程, 2022, 30(4): 489-497. |
| Wu Xi-ru, Xue Qi-wei. 3D vehicle detection for unmanned driving systerm based on lidar[J].Optics and Precision Engineering, 2022, 30(4): 489-497. | |
| 7 | 邹兵,陈鹏,刘登洪. 一种基于栅格投影的快速地面点云分割算法[J]. 城市勘测, 2021(3): 112-116. |
| Zou Bing, Chen Peng, Liu Deng-hong. A fast ground point cloud segmentation algorithm based on raster projection[J]. Urban Surveys, 2021(3): 112-116. | |
| 8 | Leng Zhi-xin, Li Shu, Li Xin, et al. An improved fast ground segmentation algorithm for 3D point cloud[C]∥2020 Chinese Control and Decision Conference, Hefei, China, 2020: 5016-5020. |
| 9 | Cheng Jie, He Dong, Lee Chang-hee. A simple ground segmentation method for LiDAR3D point clouds[C]∥2020 2nd International Conference on Advances in Computer Technology, Information Science and Communications, Guangzhou, China, 2020:171-175. |
| 10 | Zhou Ying, Wang Dan, Xie Xiang, et al. A fast and accurate segmentation method for ordered LiDAR point cloud of large-scale scenes[J]. IEEE Geoscience and Remote Sensing Letters, 2014,11(11):1981-1985. |
| 11 | Paigwar A, Erkent Ö, Sierra-Gonzalez D, et al. GndNet: fast ground plane estimation and point cloud segmentation for autonomous vehicles[C]∥2020 IEEE/RSJ International Conference on Intelligent Robots and Systems, Las Vegas,USA,2020:2150-2156. |
| 12 | Fischler M A, Bolles R C. Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography[J]. Commun, ACM, 1981,24(6): 381-395. |
| 13 | Zermas D, Izzat I, Papanikolopoulos N. Fast segmentation of 3D point clouds: a paradigm on LiDAR data for autonomous vehicle applications[C]∥2017 IEEE International Conference on Robotics and Automation, Maria Bay Sands,Singapore,2017: 5067-5073. |
| 14 | Lim H, Hwang S, Myung H. ERASOR: egocentric ratio of pseudo occupancy-based dynamic object removal for static 3D Point cloud map building[J]. IEEE Robotics and Automation Letters, 2021,6(2):2272-2279. |
| 15 | Lim H, Oh M, Myung H. PatchWork: concentric zone-based region-wiseground segmentation with ground likelihood estimation using a 3D LiDAR sensor[J]. IEEE Robotics and Automation Letters,2021,6(4):6458-6465. |
| [1] | Xue-mei LI,Chun-yang WANG,Xue-lian LIU,Chun-hao SHI,Guo-rui LI. Point cloud registration method based on supervoxel bidirectional nearest neighbor distance ratio [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(8): 1918-1925. |
| [2] | Xue-mei LI,Chun-yang WANG,Xue-lian LIU,Da XIE. Time delay estimation of linear frequency-modulated continuous-wave lidar signals via SESTH [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(4): 950-958. |
| [3] | Min-xiang WEI,Jia-wei YANG,Kai CHEN,Zhi-hao WANG,Zhao SHA. Vehicle longitudinal following based on improved brain emotional learning model [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(12): 2994-3005. |
| [4] | Le-ping LIN,Zeng-tong LU,Ning OUYANG. Face reconstruction and recognition in non⁃cooperative scenes [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(12): 2941-2946. |
| [5] | Hui-jing DOU,Gang DING,Jia GAO,Xiao LIANG. Wideband signal direction of arrival estimation based on compressed sensing theory [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2237-2245. |
| [6] | Xiang-jun YU,Yuan-hui HUAI,Zong-wei YAO,Zhong-chao SUN,An YU. Key technologies in autonomous vehicle for engineering [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(4): 1153-1168. |
| [7] | Wei-gang ZHU,Chao ZHU,Ya-qiu ZHANG,Hai-bin WEI. Construction and quality evaluation of digital elevation model based on convolution grid surface fitting algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(3): 1073-1080. |
| [8] | Xin-yu JIN,Mu-han XIE, SUN-Bin. Grain information compressed sensing based on semi-tensor product approach [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(1): 379-385. |
| [9] | Xiao-hui WANG,Lu-shen WU,Hua-wei CHEN. Denoising of scattered point cloud data based on normal vector distance classification [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(1): 278-288. |
| [10] | Li⁃min GUO,Xin CHEN,Tao CHEN. Radar signal modulation type recognition based on AlexNet model [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 1000-1008. |
| [11] | ZHANG Ming-fang, FU Rui, GUO Ying-shi, SHI Yong-quan, Cheng Wen-dong. Road segmentation method based on irregular three dimensional point cloud [J]. 吉林大学学报(工学版), 2017, 47(5): 1387-1394. |
| [12] | WANG Xin-zhu, LI Jun, LI Hong-jian, SHANG Bing-xu. -Obstacle detection based on 3D laser scanner and range image for intelligent vehicle [J]. 吉林大学学报(工学版), 2016, 46(2): 360-365. |
|
||