Journal of Jilin University(Engineering and Technology Edition) ›› 2022, Vol. 52 ›› Issue (11): 2558-2567.doi: 10.13229/j.cnki.jdxbgxb20210267
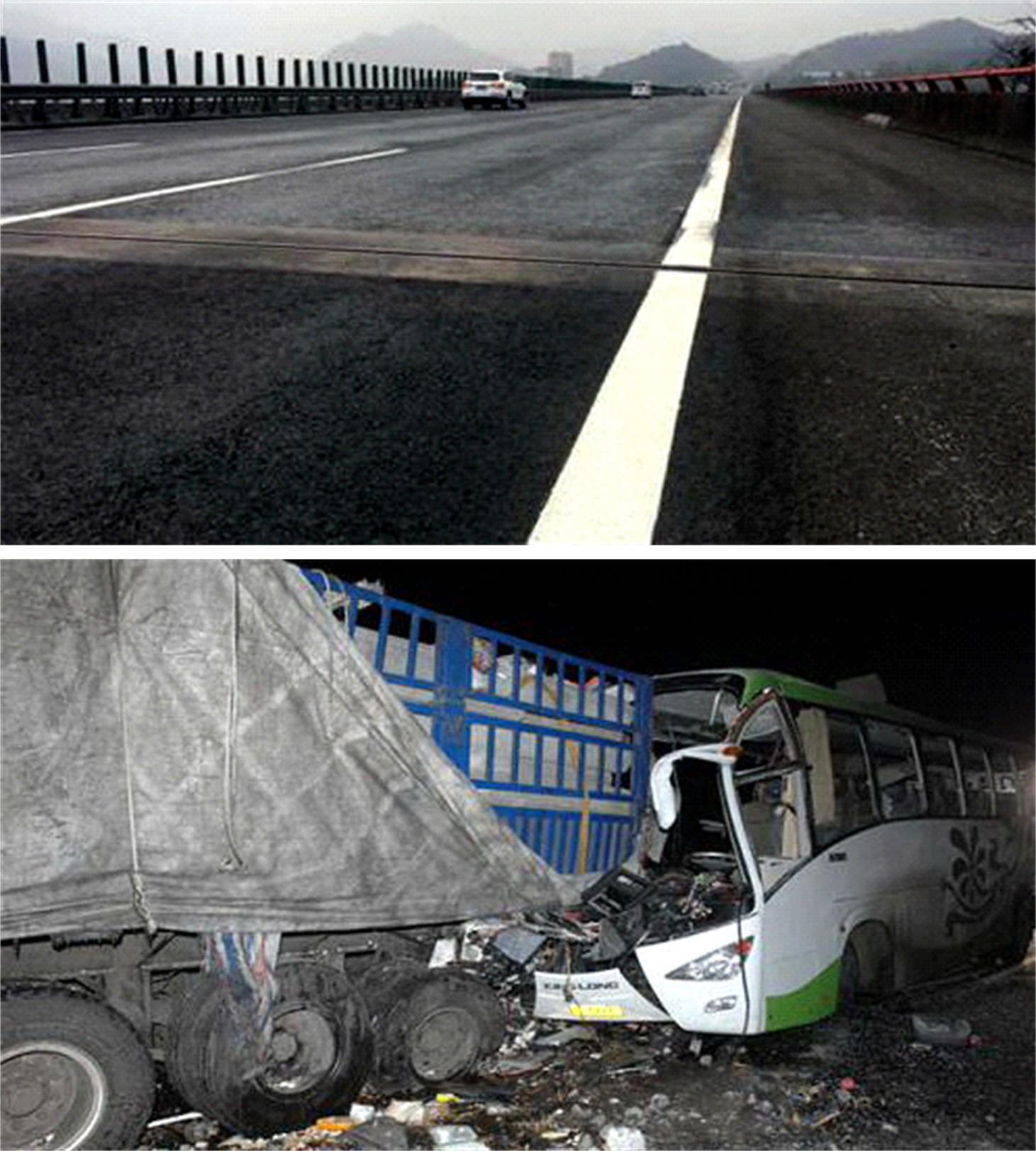
Automatic driving strategy of high⁃speed lane changing in snowy weather based on typical accident scenarios
Tao PENG1,2( ),Rui FANG2,Xing-liang LIU2,Hai-wei WANG3(),Yan-wei PANG1,Hong-guo XU4,Fu-ju LIU2,Tao WANG5
),Rui FANG2,Xing-liang LIU2,Hai-wei WANG3(),Yan-wei PANG1,Hong-guo XU4,Fu-ju LIU2,Tao WANG5
- 1.School of Electrical and Information Engineering,Tianjin University,Tianjin 300072,China
2.China Automotive Technology and Research Center Co. ,Ltd. ,Tianjin 300300,China
3.School of Transportation and Economic Management,Guangdong Communication Polytechnic,Guangzhou 510650,China
4.College of Transportation,Jilin University,Changchun 130022,China
5.College of Automobile and Transportation,Tianjin University of Technology and Education,Tianjin 300222,China
CLC Number:
- U469.2












| 1 | Jonathan J R, Shirley R, Salissou M, et al. What are the factors that contribute to road accidents? an assessment of law enforcement views, ordinary drivers' opinions, and road accident records[J]. Accident Analysis & Prevention, 2018, 115: 11-24. |
| 2 | 张荣辉, 游峰, 初鑫男, 等. 车-车协同下无人驾驶车辆的换道汇入控制方法[J]. 中国公路学报, 2018, 31(4): 180-191. |
| Zhang Rong-hui, You Feng, Chu Xin-nan, et al. Lane change merging control method for unmanned vehicle under V2V cooperation environment[J]. China Journal of Highway and Transport, 2018, 31(4): 180-191. | |
| 3 | 陈虹, 申忱, 郭洪艳, 等. 面向动态避障的智能汽车滚动时域路径规划[J]. 中国公路学报, 2019, 32(1): 162-172. |
| Chen Hong, Shen Chen, Guo Hong-yan, et al. Moving Horizon path planning for intelligent vehicle considering dynamic obstacle avoidance[J]. China Journal of Highway and Transport, 2019, 32(1): 162-172. | |
| 4 | Gipps P G. A model for the structure of lane-changing decisions[J]. Transportation Research, Part B, 1986, 20(5): 403-414. |
| 5 | Ratrout N T, Rahman S M. A comparative analysis of currently used microscopic and macroscopic traffic simulation software[J]. The Arabian Journal for Science and Engineering, 2009, 34(1): 121-133. |
| 6 | 黄玲, 郭亨聪, 张荣辉, 等. 人机混驾环境下基于LSTM的无人驾驶车辆换道行为模型[J]. 中国公路学报, 2020, 33(7): 156-166. |
| Huang Ling, Guo Heng-cong, Zhang Rong-hui, et al. LSTM-based lane-changing behavior model for unmanned vehicle under environment of heterogeneous human-driven and autonomous vehicles[J]. China Journal of Highway and Transport, 2020, 33(7): 156-166. | |
| 7 | Lecun Y, Cosatto E, Ben J, et al. Dave: autonomous off-road vehicle control using end-to-end learning[R]. Courant Institute, New York University, USA:Technical Report DARPA-IPTO Final Report, 2004. |
| 8 | 杨顺, 蒋渊德, 吴坚, 等. 基于多类型传感数据的自动驾驶深度强化学习方法[J]. 吉林大学学报: 工学版, 2019, 49(4): 1026-1033. |
| Yang Shun, Jiang Yuan-de, Wu Jian, et al. Autonomous driving policy learning based on deep reinforcement learning and muti-type sensor data[J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(4): 1026-1033. | |
| 9 | Ngai D C K, Yung N H C. A multiple-goal reinforcement learning method for complexvehicle overtaking maneuvers[J]. IEEE Transactions on Intelligent Transportation Systems, 2011, 12(2): 509-522. |
| 10 | Matthew M N, Chris U, Jhon M D, et al. Motion planning for autonomous driving with a conformal spatiotemporal lattice[C]∥IEEE International Conference on Robotics and Automation, Shanghai, China, 2011: 4889-4895. |
| 11 | Zhang F, Gonzales J, Li S E, et al. Drift control for cornering maneuver of autonomous vehicles[J]. Mechatronics, 2018, 54: 167-174. |
| 12 | Nurbaiti W, Hairi Z, Mohd A A R, et al. Study on potential field based motion planning and control for automated vehicle collision avoidance systems[C]∥IEEE International Conference on Mechatronics, Churchill, Australia, 2017: 208-213. |
| 13 | 孙浩, 邓伟文, 张索民, 等. 考虑全局最优性的汽车微观动态轨迹规划[J]. 吉林大学学报: 工学版, 2014, 44(4): 918-924. |
| Sun Hao, Deng Wei-wen, Zhang Suo-min, et al. Micro vehicle dynamic trajectory plan with global optimality[J]. Journal of Jilin University(Engineering and Technology Edition), 2014, 44(4): 918-924. | |
| 14 | 夏小云, 周育人. 蚁群优化算法的理论研究进展[J]. 智能系统学报, 2016, 11: 9-16. |
| Xia Xiao-yun, Zhou Yu-ren. Advances in theoretical research of ant colony optimization[J]. CAAI Transactions on Intelligent Systems, 2016, 11: 9-16. | |
| 15 | Muller U, Ben J, Cosatto E, et al. Offroad obstacle avoidance through endtoend learning[C]∥Advances in Neural Information Processing Systems, Vancouver, Canada, 2006: 739746. |
| [1] | Jia-xu ZHANG,Xin-zhi WANG,Jian ZHAO,Zheng-tang SHI. Path planning and discrete sliding mode tracking control for high⁃speed lane changing collision avoidance of vehicle [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(3): 1081-1090. |
|
||