Journal of Jilin University(Engineering and Technology Edition) ›› 2021, Vol. 51 ›› Issue (3): 1081-1090.doi: 10.13229/j.cnki.jdxbgxb20200057
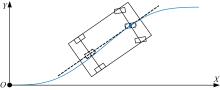
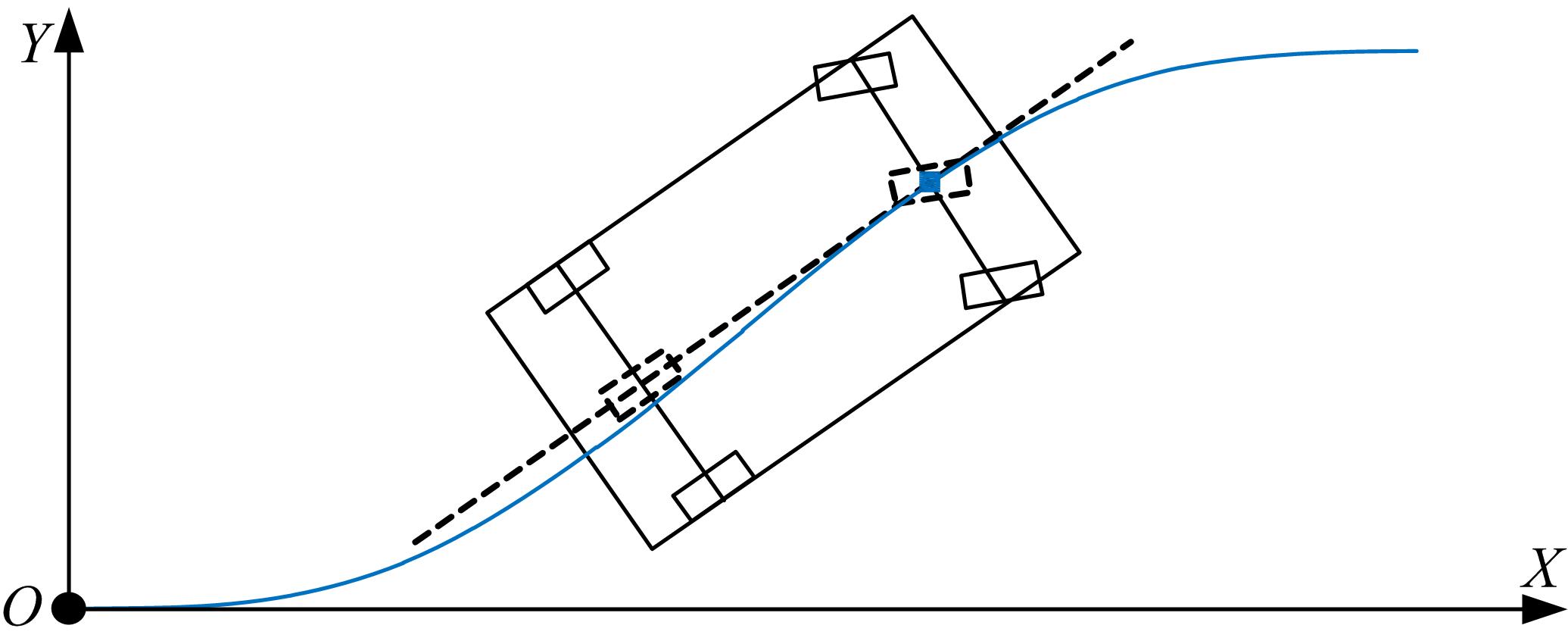
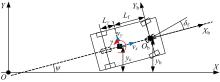
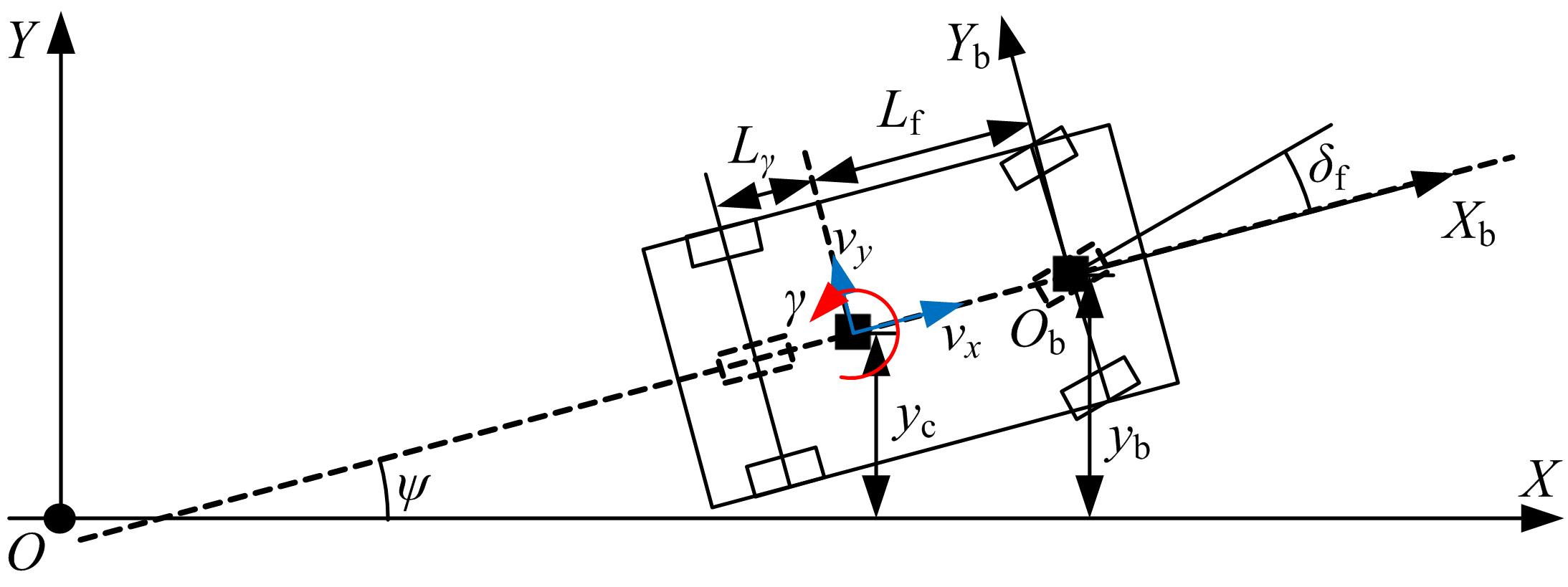
Path planning and discrete sliding mode tracking control for high⁃speed lane changing collision avoidance of vehicle
Jia-xu ZHANG1,2( ),Xin-zhi WANG1,Jian ZHAO1(),Zheng-tang SHI3
),Xin-zhi WANG1,Jian ZHAO1(),Zheng-tang SHI3
- 1.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
2.Intelligent Network R&D Institute,China FAW Group Co. ,Ltd. ,Changchun 130011,China
3.Intelligent Vehicle Control System Research Institute,Zhejiang Asia-Pacific Mechanical and Electronic Co. ,Ltd. ,Hangzhou 311200,China
CLC Number:
- U461.1






| 1 | Funke J, Brown M, Erlien S M, et al. Collision avoidance and stabilization for autonomous vehicles in emergency scenarios[J]. IEEE Transactions on Control Systems Technology, 2017, 25(4): 1204-1216. |
| 2 | 张琳, 章新杰, 郭孔辉, 等. 未知环境下智能汽车轨迹规划滚动窗口优化[J]. 吉林大学学报:工学版, 2018, 48(3): 654-660. |
| Zhang Lin, Zhang Xin-jie, Guo Kong-hui, et al. Rolling window optimization for intelligent vehicle trajectory planning in unknown environment[J]. Journal of Jilin University(Engineering and Techinology Edition), 2018, 48(3): 654-660. | |
| 3 | Li Shao-song, Li Zheng, Yu Zhi-xin, et al. Dynamic trajectory planning and tracking for autonomous vehicle with obstacle avoidance based on model predictive control[J]. IEEE Access, 2019, 7: 132074-132086. |
| 4 | Minh V T, Pumwa J. Feasible path planning for autonomous vehicles[J/OL]. [2020-01-05]. |
| 5 | Wang C Y, Zhao W Z, Xu Z J, et al. Path planning and stability control of collision avoidance system based on active front steering[J]. Science China Technological Sciences, 2017, 60(8): 1231-1243. |
| 6 | Peng T, Su L L, Zhang R H, et al. A new safe lane-change trajectory model and collision avoidance control method for automatic driving vehicles[J]. Expert Systems with Applications, 2020, 141: 112953. |
| 7 | Song Xiao-lin, Cao Hao-tian, Huang Jiang. Vehicle path planning in various driving situations based on the elastic band theory for highway collision avoidance[J]. Proceedings of the Institution of Mechanical Engineers, Part D: Journal of Automobile Engineering, 2013, 227(12): 1706-1722. |
| 8 | Ji J, Khajepour A, Melek W, et al. Path planning and tracking for vehicle collision avoidance based on model predictive control with multi-constraints[J]. IEEE Transactions on Vehicular Technology, 2017, 66(2): 952-964. |
| 9 | Guo Hong-yan, Jia Rui, Yu Zai-tao, et al. Obstacle avoidance for autonomous ground vehicles based on moving horizon optimization[C]∥Proceeding of the 11th World Congress on Intelligent Control and Automation, Shenyang, China, 2014. |
| 10 | Zhang Chao-yong, Chu Duan-feng, Liu Shi-dong, et al. Trajectory planning and tracking for autonomous vehicle based on state lattice and model predictive control[J]. IEEE Intelligent Transportation Systems Magazine, 2019, 11(2): 29-40. |
| 11 | 张家旭, 张振兆, 赵健, 等. 采用极点配置的自动驾驶汽车换道路径规划与跟踪控制[J]. 西安交通大学学报, 2020, 54(10): 160-167. |
| Zhang Jia-xu, Zhang Zhen-zhao, Zhao Jian, et al. A path planning and tracking control method for lane changing of autonomous vehicle using pole assignment[J]. Journal of Xi'an Jiaotong University, 2020, 54(10):160-167. | |
| 12 | Rajamani R. Vehicle Dynamics and Control[M]. New York:Springer, 2006. |
| 13 | 张家旭, 赵健, 施正堂, 等. 基于回旋曲线的平行泊车路径规划与跟踪控制[J]. 吉林大学学报:工学版, 2020, 50(6): 2247-2257. |
| Zhang Jia-xu, Zhao Jian, Shi Zheng-tang, et al. Path planning and tracking control for parallel parking based on clothoid curve[J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(6):2247-2257. | |
| 14 | Mousavinejad E, Han Q L, Yang F W, et al. Integrated control of ground vehicles dynamics via advanced terminal sliding mode control[J]. Vehicle System Dynamics, 2017, 55(2): 268-294. |
| 15 | Eun Y, Kim J H, Kim K, et al. Discrete-time variable structure controller with a decoupled disturbance compensator and its application to a CNC servomechanism[J]. IEEE Transactions on Control Systems Technology, 1999, 7(4): 414-423. |
| 16 | Thrun S, Montemerlo M, Dahlkamp H, et al. Stanley: the robot that won the DARPA grand challenge[J]. Journal of Field Robotics, 2006, 23(9): 661-692. |
| [1] | Guo-ying CHEN,Jun YAO,Peng WANG,Qi-kun XIA. Stability control strategy for rear in⁃wheel motor drive vehicle [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(2): 397-405. |
| [2] | Wei-da WANG,Yan-jie WU,Jia-lei SHI,Liang LI. Electronic hydraulic brake power system control strategy based on driver intention recognition [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(2): 406-413. |
| [3] | Shou-tao LI,Rui WANG,Jing-chun XU,De-jun WANG,Yan-tao TIAN,Ding-li YU. A vehicle collision avoidance control method based on model predictive composite control [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(2): 738-746. |
| [4] | Lu XIONG,Yan-chao WEI,Le-tian GAO. Inertial measurement unit/wheel speed sensor integrated zero-speed detection [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(1): 134-138. |
| [5] | Dao WU,Li-bin ZHANG,Yun-xiang ZHANG,Hong-ying SHAN,Hong-mei SHAN. Visual detection method for vehicle braking time sequence based on slip rate identification [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(1): 206-216. |
| [6] | En-hui ZHANG,Ren HE,Wei-dong SU. Numerical analysis of oil liquid sloshing characteristics in fuel tank with different baffle structures [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(1): 83-95. |
| [7] | Fang-wu MA,Hong-yu LIANG,Qiang WANG,Yong-feng PU. In-plane dynamic crushing of dual-material structure with negative Poisson′s ratio [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(1): 114-121. |
| [8] | Chang-qing DU,Xi-liang CAO,Biao HE,Wei-qun REN. Parameters optimization of dual clutch transmission based on hybrid particle swarm optimization [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1556-1564. |
| [9] | Fei GAO,Yang XIAO,Wen-hua ZHANG,Jin-xuan QI,Zi-qiao LI,Xiao-yuan MA. Influence of coupling of elevated temperature and state of charge on mechanical response of Li⁃ion battery cells [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1574-1583. |
| [10] | Jing LI,Qiu-jun SHI,Liang HONG,Peng LIU. Commercial vehicle ESC neural network sliding mode control based on vehicle state estimation [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1545-1555. |
| [11] | Ji-qing CHEN,Qing-sheng LAN,Feng-chong LAN,Zhao-lin LIU. Trajectory tracking control based on tire force prediction and fitting [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1565-1573. |
| [12] | Zhi-gang YANG,Ya-jun FAN,Chao XIA,Shi-jun CHU,Xi-zhuang SHAN. Drag reduction of a square⁃back Ahmed model based on bi⁃stable wake [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1635-1644. |
| [13] | Zhe SHEN,Yi-gang WANG,Zhi-gang YANG,Yin-zhi HE. Drift error correction of unknown sound source in wind tunnel using approximation method [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1584-1589. |
| [14] | Zhao LIU,Jiang-lin CHENG,Yu-tian ZHU,Li-hui ZHENG. Vertical vibration modeling and motion correlation analysis of rail vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1600-1607. |
| [15] | Xin CHEN,Ning WANG,Chuan-liang SHEN,Xiao FENG,Chang-hai YANG. Effect of rearview mirror modeling on aerodynamic noise of front window [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 426-436. |
|
||