Journal of Jilin University(Engineering and Technology Edition) ›› 2024, Vol. 54 ›› Issue (12): 3717-3728.doi: 10.13229/j.cnki.jdxbgxb.20230167
Previous Articles Next Articles
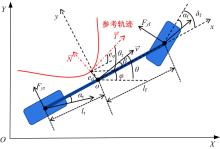
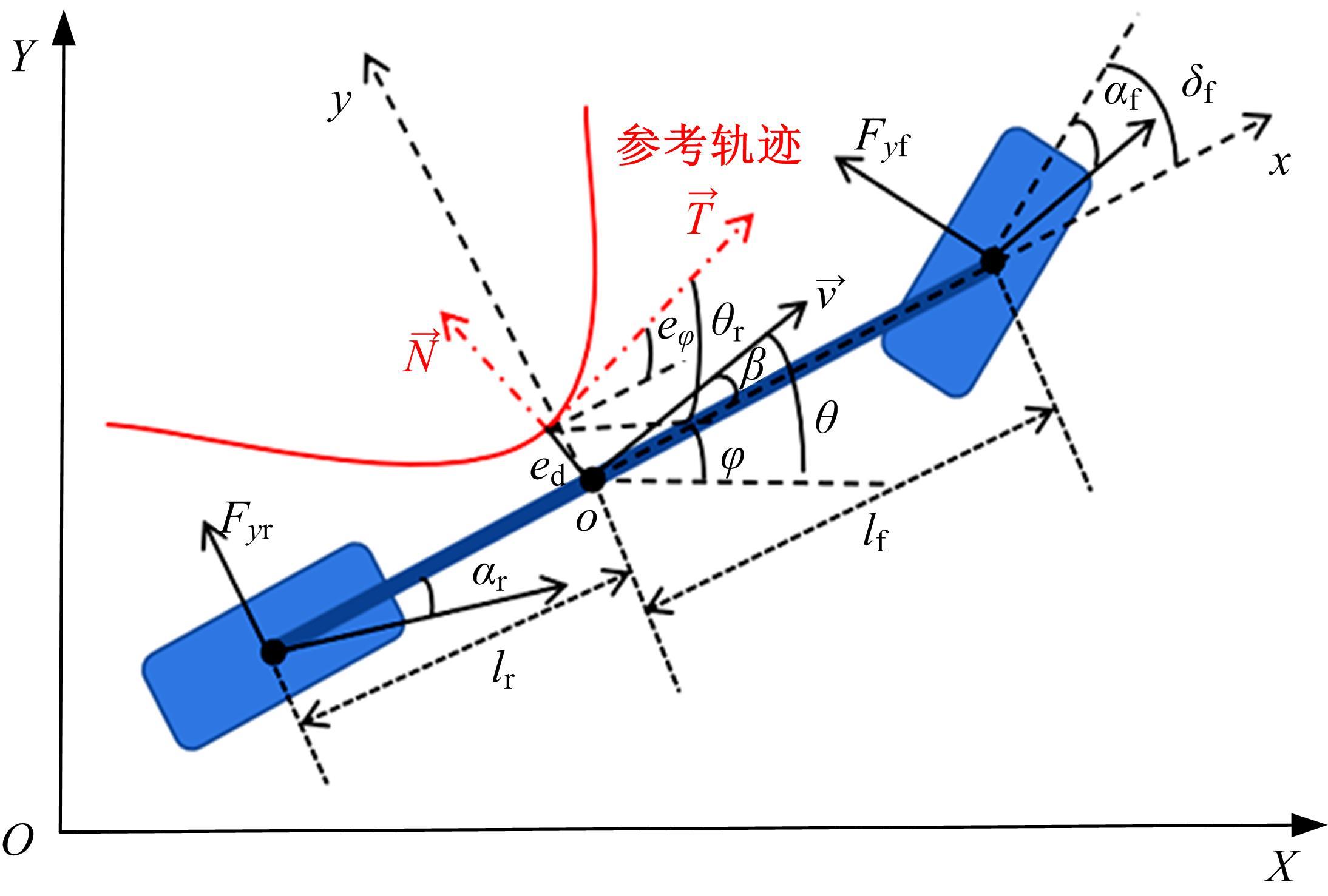
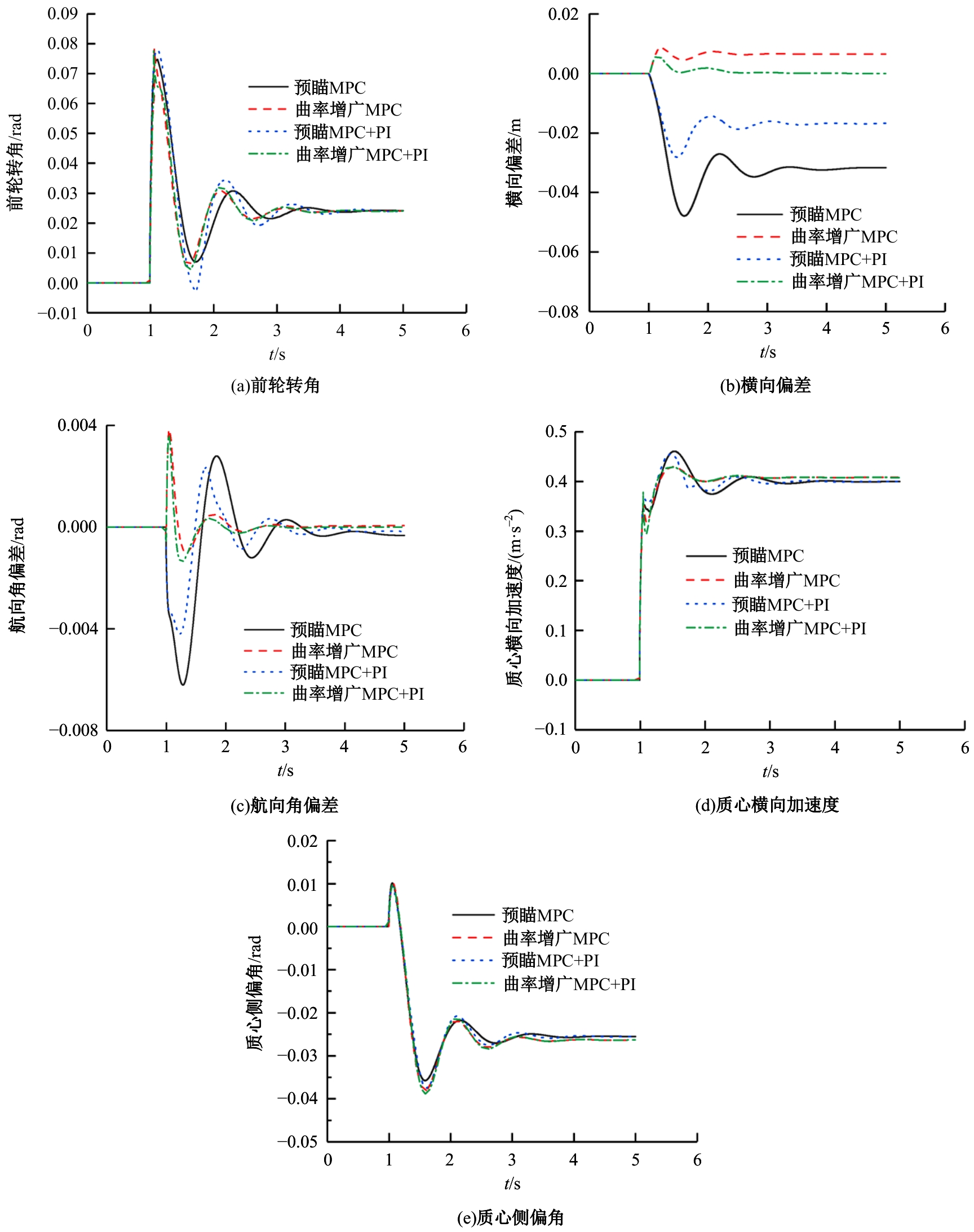
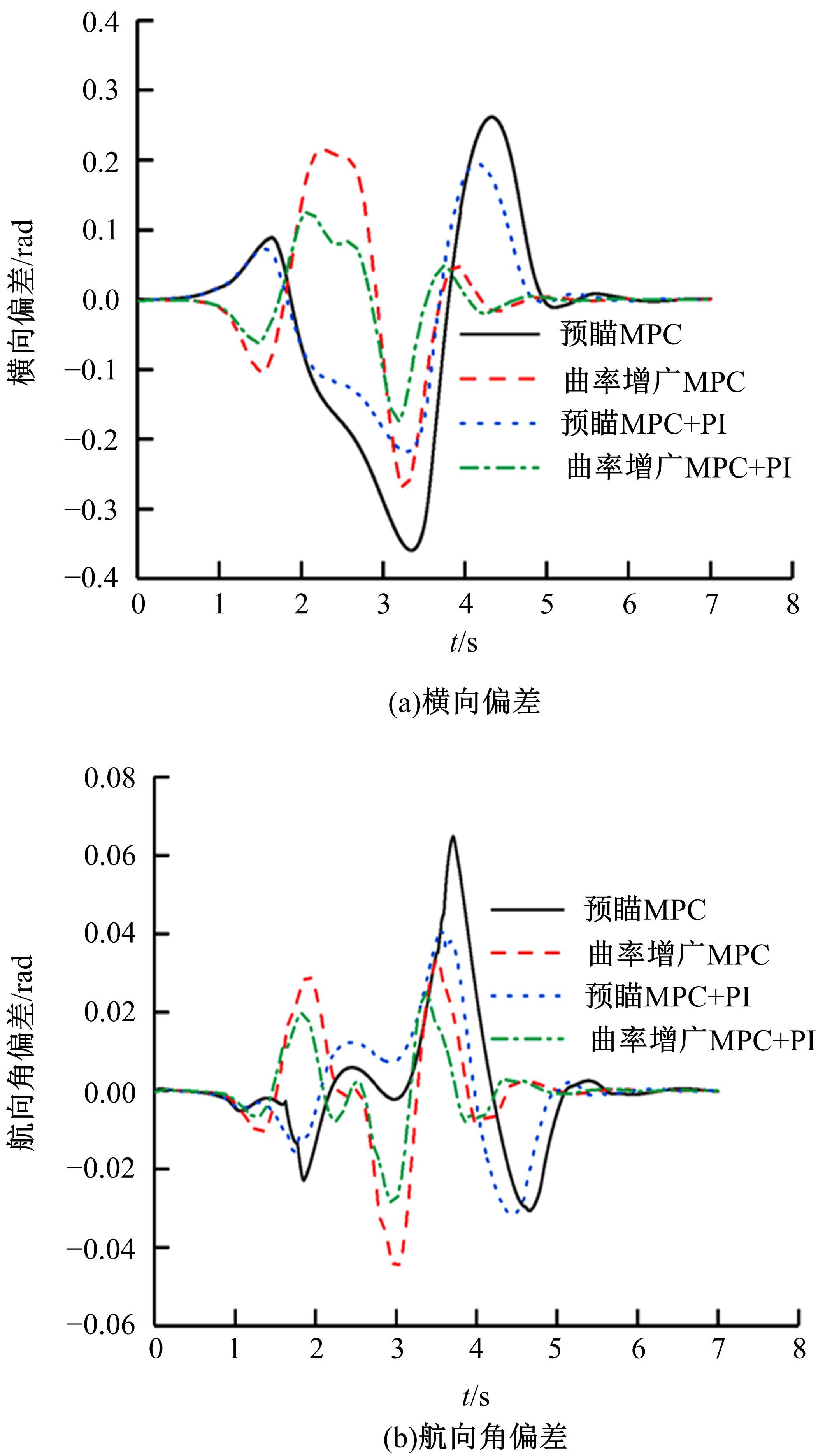
Intelligent vehicle trajectory tracking control based on curvature augmentation
Guo LIU1,2( ),Jian XIONG1(),Xiu-jian YANG1,Yang-fan HE1
),Jian XIONG1(),Xiu-jian YANG1,Yang-fan HE1
- 1.Faculty of Transportation Engineering,Kunming University of Science and Technology,Kunming 650504,China
2.City College,Kunming University of Science and Technology,Kunming 650051,China
CLC Number:
- TP273


| 1 | Paden B, Cap M, Yong S Z, et al. A survey of motion planning and control techniques for self-driving urban vehicles[J]. IEEE Transactions on Intelligent Vehicles, 2016, 1(1): 33-55. |
| 2 | 陈特,陈龙,徐兴,等.分布式驱动无人车路径跟踪与稳定性协调控制[J].汽车工程,2019,41(10):1109-1116. |
| Chen Te, Chen Long, Xu Xing, et al. Coordinated control of path tracking and stability of distributed drive unmanned vehicles[J]. Automotive Engineering, 2019, 41(10): 1109-1116. | |
| 3 | Xu S, Peng H. Design, analysis, and experiments of preview path tracking control for autonomous vehicles[J].IEEE Transactions on Intelligent Transportation Systems, 2020, 21(1): 48-58. |
| 4 | Dai C, Zong C, Chen G. Path tracking control based on model predictive control with adaptive preview characteristics and speed-assisted constraint[J]. IEEE Access, 2020, 8: 184697-184709. |
| 5 | 汪若尘,魏振东,叶青,等.视觉预瞄式智能车辆纵横向协同控制研究[J].汽车工程, 2019, 41(7): 763-770, 830. |
| Wang Ruo-chen, Wei Zhen-dong, Ye Qing, et al. A reasearch on visual preview longitudinal and lateral cooperative control of intelligent vehicle[J]. Automotive Engineering, 2019, 41(7):763-770, 830. | |
| 6 | 刁勤晴,张雅妮,朱凌云. 双预瞄点智能车大曲率路径的横纵向模糊控制[J].中国机械工程, 2019,30(12): 1445-1452. |
| Diao Qin-qing, Zhang Ya-ni, Zhu Ling-yun. A lateral and longitudinal fuzzy control of intelligent vehicles with double preview points for large curvature roads[J]. China Mechanical Engineering, 2019, 30(12): 1445-1452. | |
| 7 | 胡杰,钟鑫凯,陈瑞楠,等.基于模糊LQR的智能汽车路径跟踪控制[J].汽车工程,2022,44(1):17-25. |
| Hu Jie, Zhong Xin-kai, Chen Rui-nan, et al. Path tracking control of intelligent vehicles based on fuzzy LQR[J].Automotive Engineering, 2022, 44(1): 17-25. | |
| 8 | 陈亮,秦兆博,孔伟伟,等.基于最优前轮侧偏力的智能汽车LQR横向控制[J].清华大学学报: 自然科学版, 2021, 61(9): 906-912. |
| Chen Liang, Qin Zhao-bo, Kong Wei-wei, et al. Lateral control using LQR for intelligent vehicles based on optimal front-tire lateral force[J].Journal of Tsinghua University(Natural Science Edition), 2021, 61(9): 906-912. | |
| 9 | Chen X, Peng Y, Hang P, et al. Path tracking control of four-wheel independent steering electric vehicles based on optimal control[C]∥2020 39th Chinese Control Conference,Shenyang, China,2020:5436-5442. |
| 10 | He H, Shi M, Li J, et al. Design and experiential test of a model predictive path following control with adaptive preview for autonomous buses[J]. Mechanical Systems and Signal Processing, 2021, 157(99):107701-107720. |
| 11 | Netto S M. Nested PID steering control for lane keeping in autonomous vehicles[J]. Control Engineering Practice, 2011,19(12): 1459-1467. |
| 12 | Ahn J, Shin S, Kim M, et al. Accurate path tracking by adjusting Look-ahead point in pure pursuit method[J]. International Journal of Automotive Technology, 2021, 22(1): 119-129. |
| 13 | Amer N H, Hudha K, Zamzuri H, et al. Adaptive modified Stanley controller with fuzzy supervisory system for trajectory tracking of an autonomous armoured vehicle[J]. Robotics and Autonomous Systems, 2018, 105:94-111. |
| 14 | 刘凯,陈慧岩,龚建伟,等.高速无人驾驶车辆的操控稳定性研究[J].汽车工程, 2019, 41(5): 514-521. |
| Liu Kai, Chen Hui-yan, Gong Jian-wei, et al. A reaserch on handling stability of high-speed unmanned vehicles [J]. Automotive Engineering, 2019, 41(5): 514-521. | |
| 15 | Peng H, Wang W, An Q, et al. Path tracking and direct yaw moment coordinated control based on robust MPC with the finite time horizon for autonomous independent-drive vehicles[J].IEEE Transactions on Vehicular Technology, 2020, 69(6): 6053-6066. |
| 16 | Beal C E, Gerdes J C. Model predictive control for vehicle stabilization at the limits of handling[J]. IEEE Transactions on Control Systems Technology, 2013, 21(4): 1258-1269. |
| 17 | Amer N H, Zamzuri H, Hudha K, et al. Modelling and control strategies in path tracking control for autonomous ground vehicles: a review of state of the art and challenges[J]. Journal of Intelligent & Robotic Systems Theory & Application, 2017,86: 225-254. |
| 18 | 陈慧岩,陈舒平,龚建伟.智能汽车横向控制方法研究综述[J].兵工学报,2017,38(6):1203-1214. |
| Chen Hui-yan, Chen Shu-ping, Gong Jian-wei. A review on the research of lateral control for intelligent vehicles[J].Journal of Ordnance Industry, 2017, 38(6):1203-1214. | |
| 19 | Cheng S, Li L, Guo H Q, et al. Longitudinal collision avoidance and lateral stability adaptive control system based on MPC of autonomous vehicles[J]. IEEE Transactions on Intelligent Transportation Systems, 2019(99): No.2918176. |
| 20 | Liang Y, Li Y N, Khajepour A, et al. Holistic adaptive multi-model predictive control for the path following of 4WID autonomous vehicles[J]. IEEE Transactions on Vehicular Technology, 2020(99): 26-45. |
| 21 | Falcone P, Borrelli F, Asgari J, et al. Predictive active steering control for autonomous vehicle systems[J]. IEEE Transactions on Control Systems Technology, 2007, 15(3):566-580. |
| 22 | Brown M, Funke J, Erlien S, et al. Safe driving envelopes for path tracking in autonomous vehicles[J]. Control Engineering Practice, 2017, 61:307-316. |
| 23 | Attia R, Basset M, Orjuela R. Combined longitudinal and lateral control for automated vehicle guidance[J]. Vehicle System Dynamics: International Journal of Vehicle Mechanics and Mobility, 2014, 52(2):261-279. |
| 24 | Liu J C, Jayakumar P, Stein J L, et al.Combined speed and steering control in high-speed autonomous ground vehicles for obstacle avoidance using model predictive control[J]. IEEE Transactions on Vehicular Technology, 2017, 66(10):8746-8762. |
| 25 | 许芳,张君明,胡云峰,等. 智能车辆路径跟踪横纵向耦合实时预测控制器[J]. 吉林大学学报: 工学版,2021,51(6): 2287-2294. |
| Xu Fang, Zhang Jun-ming, Hu Yun-feng, et al. Lateral and longitudinal coupling real-time predictive controller for intelligent vehicle path tracking [J]. Journal of Jilin University (Engineering Edition), 2021,51(6):2287-2294. | |
| 26 | Bai G, Meng Y, Liu L, et al. Review and comparison of path tracking based on model predictive control[J]. Electronics, 2019, 8(10):1077-1109. |
| 27 | Boyd S, Vandenberghe L.Convex optimization[M].Cambridge: Cambridge University Press, 2004. |
| 28 | Mayne D Q, Rawlings J B, Rao C V, et al. Constrained model predictive control: stability and optimality[J]. Automatica, 2000, 36(6): 789-814. |
| 29 | Kanchwala H, Viana I B, Aouf N.Cooperative path-planning and tracking controller evaluation using vehicle models of varying complexities[J]. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2021, 235(16): 2877-2896. |
| 30 | 吴麒.自动控制原理[M].北京:清华大学出版社,2006. |
| [1] | Hong-yan GUO,Jia-ming ZHANG,Jun LIU,Yun-feng HU. Construction of virtual test scenario for intelligent vehicle and pedestrian interaction [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(9): 2511-2519. |
| [2] | Yan-tao TIAN,Wen-yan YU,Yan-shi JI,bo XIE. Shared controller design for different driving behavior models [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(9): 2676-2686. |
| [3] | Sheng CHANG,Hong-fei LIU,Nai-wei ZOU. H∞ loop shaping robust control of vehicle tracking on variable curvature curve [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(8): 2141-2148. |
| [4] | Bin XIAN,Yin-xin WANG,Ling WANG. Distributed robust tracking control for multiple unmanned aerial vehicles: theory and experimental verification [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(7): 2093-2103. |
| [5] | Xian-yi XIE,Ming-jun ZHANG,Li-sheng JIN,Bin ZHOU,Tao HU,Yu-fei BAI. Artificial bee colony trajectory planning algorithm for intelligent vehicles considering comfortable [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(6): 1570-1581. |
| [6] | Jing-hua ZHAO,Yu-tong ZHANG,Pai CAO,Zhong-shu WANG,Xiao-ping LI,Ya-nan SUN,Fang-xi XIE. Optimal energy management on extended⁃range electric vehicle equipped with compressed natural gas engine [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(3): 600-609. |
| [7] | Zhen-hai GAO,Rong-gui CAI,Tian-jun SUN,Tong YU,Hao-yuan ZHAO,Hao BAN. Data⁃filtering method for driving behavior based on vehicle shared autonomy [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(3): 589-599. |
| [8] | Xian-yi XIE,Yu-han WANG,Li-sheng JIN,Xin ZHAO,Bai-cang GUO,Ya-ping LIAO,Bin ZHOU,Ke-qiang LI. Intelligent vehicle trajectory tracking control based on adjusting step size of control horizon [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(3): 620-630. |
| [9] | Wen-hang LI,Tao NI,Ding-xuan ZHAO,Ying-jie DENG,Xiao-bo SHI. Control method on hydraulic suspension systems of rescue vehicles based on model predictive feedback technology [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(3): 610-619. |
| [10] | Li-xin YAN,Jin-pei FENG,Jun-hua GUO,Yi-ke GONG. Analysis of characteristics of the takeover behavior of co⁃driving intelligent vehicles under different dangerous scenarios [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(3): 683-691. |
| [11] | Jing-hua ZHAO,Shi-hao DU,Liang-wei LIU,Yun-feng HU,Yao SUN,Fang-xi XIE. Parameter identification for SCR systems based on improved chaos optimization algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(2): 550-557. |
| [12] | Sheng-jie HOU,Zhong-lai WANG,Peng-peng ZHI,Hao ZHENG,Jing XU. Trajectory tracking control method of biplane air vehicle considering model⁃environment uncertainty [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(12): 3699-3710. |
| [13] | De-jun WANG,Kai-ran ZHANG,Peng XU,Tian-biao GU,Wen-ya YU. Speed planning and control under complex road conditions based on vehicle executive capability [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 643-652. |
| [14] | Bo XIE,Rong GAO,Fu-qiang XU,Yan-tao TIAN. Stability control of human⁃vehicle shared steering system under low adhesion road conditions [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 713-725. |
| [15] | Shou-rui WANG,Wu-yin JIN,Zhi-yuan RUI,Xia ZHANG. Payload swing control for 3D overhead crane based on fast non⁃singular terminal sliding mode [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(12): 3508-3517. |
|