Journal of Jilin University(Engineering and Technology Edition) ›› 2024, Vol. 54 ›› Issue (12): 3699-3710.doi: 10.13229/j.cnki.jdxbgxb.20230176
Previous Articles Next Articles
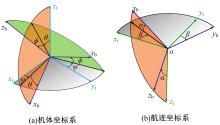
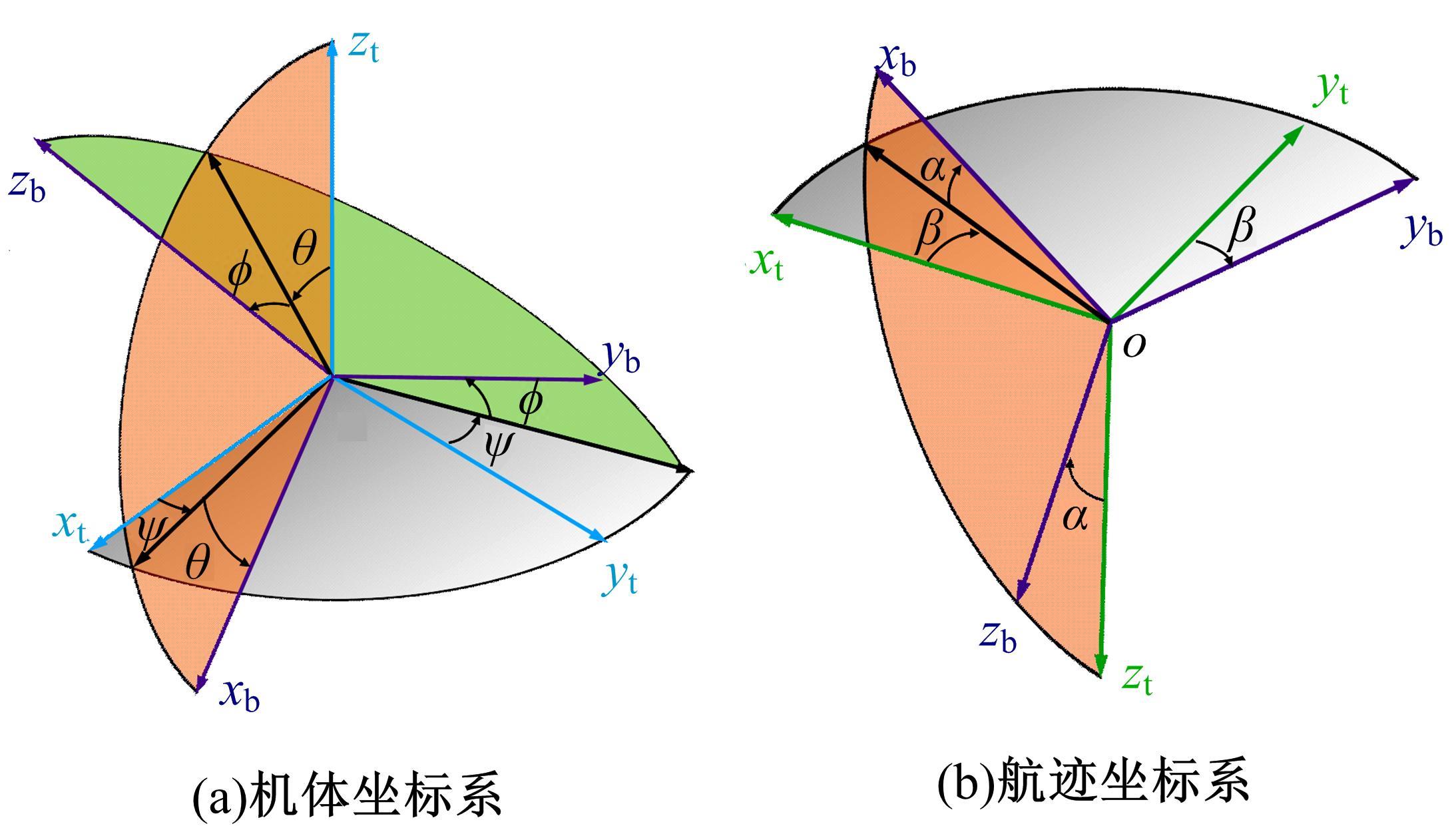
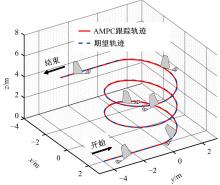
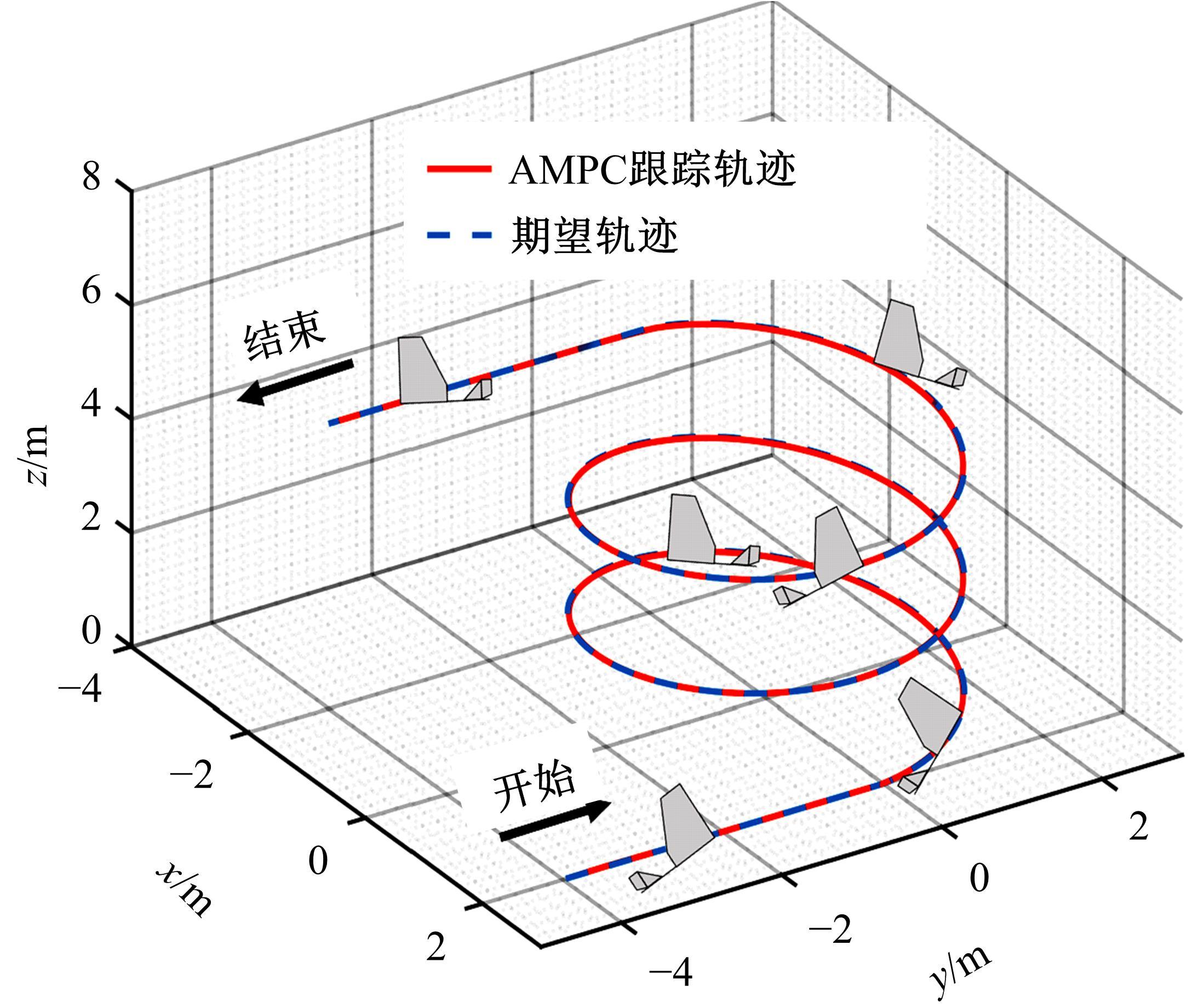
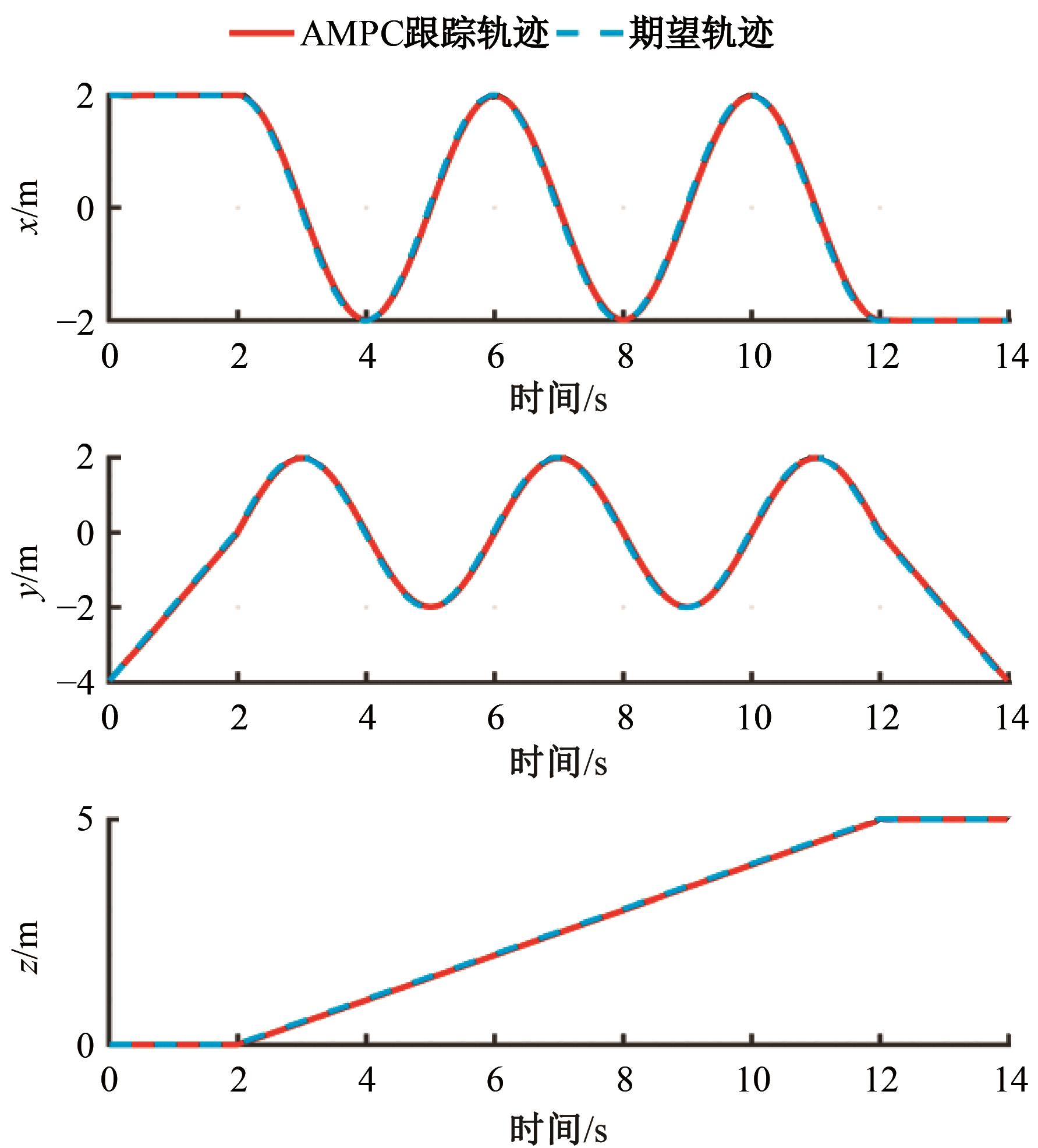
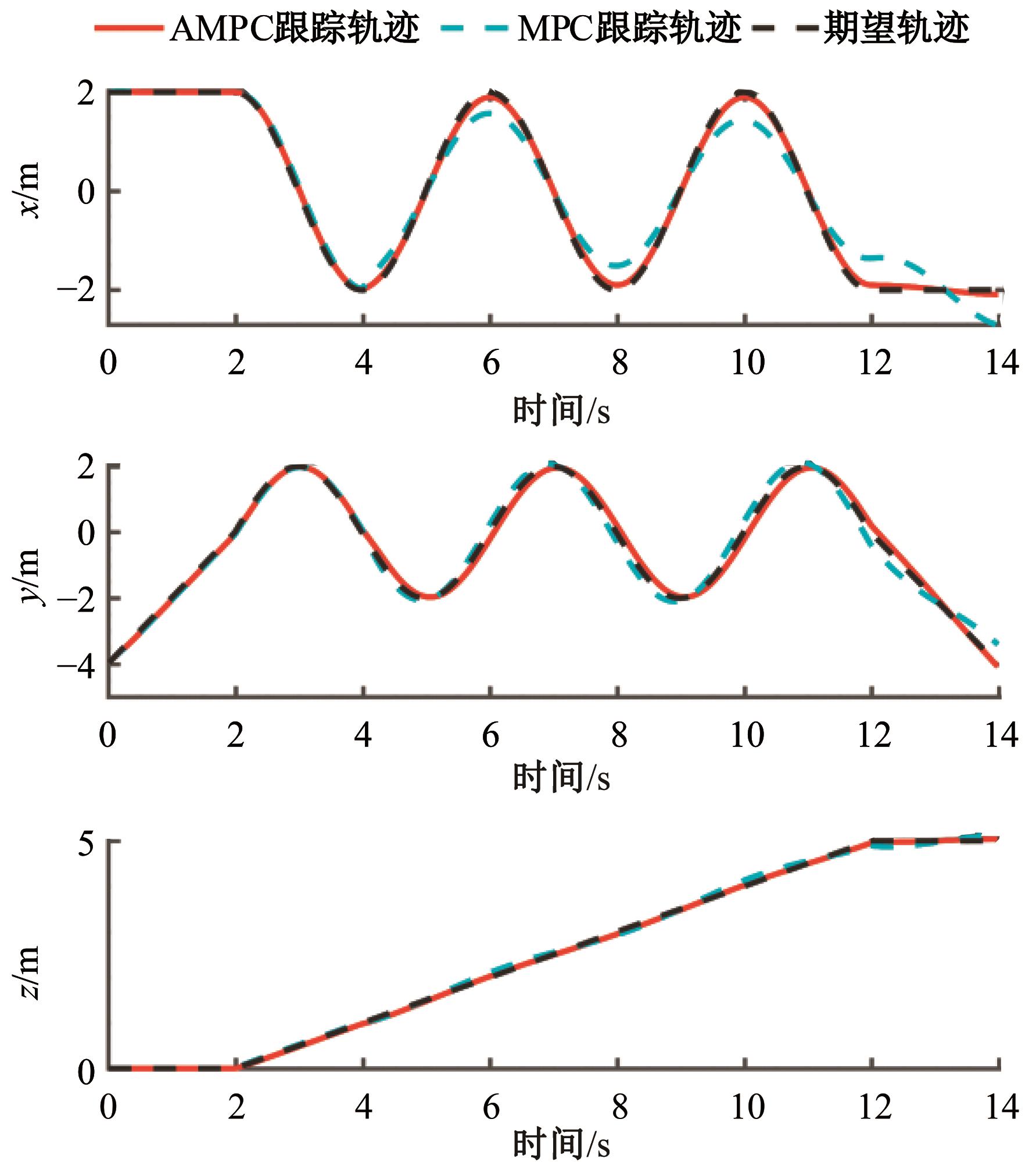
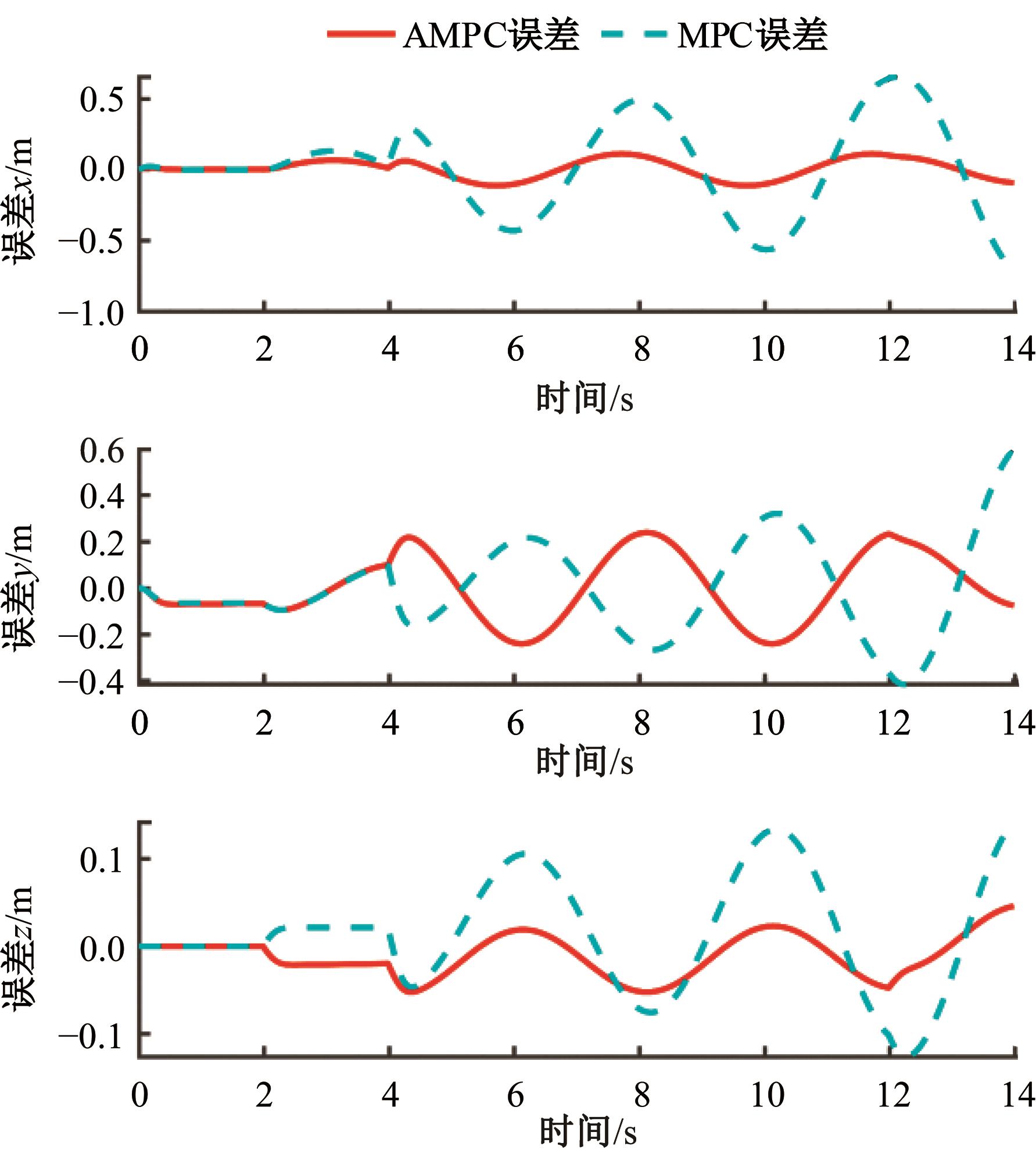
Trajectory tracking control method of biplane air vehicle considering model⁃environment uncertainty
Sheng-jie HOU1( ),Zhong-lai WANG2(),Peng-peng ZHI3,Hao ZHENG2,Jing XU2
),Zhong-lai WANG2(),Peng-peng ZHI3,Hao ZHENG2,Jing XU2
- 1.National Innovation Institute of Defense Technology,Academy of Military Sciences,Beijing 100071,China
2.School of Mechanical and Electrical Engineering,University of Electronic Science and Technology of China,Chengdu 611731,China
3.Yangtze Delta Region Institute (Huzhou),University of Electronic Science and Technology of China,Huzhou 313001,China
CLC Number:
- V249.12






| 1 | Avionics M D. A flapping of wings[J]. Science, 2012, 335(6075): 1430-1433. |
| 2 | 郑皓, 余立均, 智鹏鹏, 等. 仿生扑翼微型飞行器动态避障策略[J]. 吉林大学学报:工学版, 2023, 53(9): 2732-2740. |
| Zheng Hao, Yu Li-jun, Zhi Peng-peng, et al. Dynamic obstacle avoidance strategy for flapping⁃wing micro air vehicles[J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(9): 2732-2740. | |
| 3 | 李丹. 仿生扑翼飞行器:空气动力、扑动与智能控制的完美结合[J]. 航空制造技术, 2018, 61(8): 22-24. |
| Li Dan. Flapping flight vehicle: ideal combination of aerodynamic, flapping and intelligent control[J]. Aeronautical Manufacturing Technology, 2018, 61(8): 22-24. | |
| 4 | James E B, Chang K K, Yuri S. Control of a flapping-wing micro air vehicle: sliding-mode approach[J]. Journal of Guidance, Control, and Dynamics, 2018, 41(5): 1223-1226. |
| 5 | 肖天航, 罗东明, 郑祥明, 等. 仿生飞行器非定常气动优化设计研究进展与挑战[J]. 空气动力学学报, 2018, 36(1): 80-87. |
| Xiao Tian-hang, Luo Dong-ming, Zheng Xiang-ming, et al. Research progress and challenges of unsteady aerodynamic optimization design of bionic aircraft[J]. Journal of Aerodynamics, 2018, 36(1): 80-87. | |
| 6 | 范继祥, 周狄. 基于剪式陀螺系统的空间飞行器非线性姿态控制[J]. 机械工程学报, 2010, 46(8): 151-158. |
| Fan Ji-xiang, Zhou Di. Nonlinear attitude control of spacecraft based on scissor pairs of control moment gyroscope[J]. Chinese Journal of Mechanical Engineering, 2010, 46(8): 151-158. | |
| 7 | 李光明. 大翼展仿生飞鸟机器人机构设计与远程操作控制方法[D]. 哈尔滨: 哈尔滨工业大学机电工程与自动化学院, 2017. |
| Li Guang-ming. Mechanism design and remote operation control method of bionic bird robot with large wing[D]. Harbin:College of Mechanical and Electrical Engineering and Automation, Harbin Institute of Technology, 2017. | |
| 8 | 吴涵. 扑翼飞行器半自主导航系统的设计与实现[D]. 北京: 北京交通大学机械与电子控制工程学院, 2019. |
| Wu Han. Design and implementation of semi-autonomous navigation system for flapping wing aircraft[D]. Beijing: School of Mechanical,Electronic and Control Engineering, Beijing Jiaotong University, 2019. | |
| 9 | 刘晶, 汪超, 谢鹏, 等. 基于PD控制的仿昆虫扑翼样机研制[J]. 航空学报, 2020, 41(9):106-117. |
| Liu Jing, Wang Chao, Xie Peng, et al. Development of insect-like flapping wing micro air vehicle based on PD control[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(9): 106-117. | |
| 10 | 张西金, 方宗德, 杨小辉, 等. 微扑翼飞行器驱动装置设计与翅翼轨迹控制仿真研究[J]. 系统仿真学报, 2011, 23(4): 735-739. |
| Zhang Xi-jin, Fang Zong-de, Yang Xiao-hui, et al. Driving equipment design and wing motion track control simulation for micro flapping flight[J]. Journal of System Simulation, 2011, 23(4): 735-739. | |
| 11 | Banazadeh A, Taymourtash N. Adaptive attitude and position control of an insect-like flapping wing air vehicle[J]. Nonlinear Dynamics, 2016, 85(1): 47-66. |
| 12 | 李航, 何广平, 毕富国. 一类微型扑翼飞行器的滑模自适应姿态控制[J]. 空间控制技术与应用, 2018, 44(5): 81-88. |
| Li Hang, He Guang-ping, Bi Fu-guo. Sliding-mode adaptive attitude controller design for flapping-wing micro air vehicle[J]. Aerospace Control and Application, 2018, 44(5): 81-88. | |
| 13 | 王丙元, 张帅华, 郑芳, 等. 基于自适应终端滑模的扑翼飞行器姿态控制[J]. 控制工程, 2020, 27(2): 309-315. |
| Wang Bing-yuan, Zhang Shuai-hua, Zheng Fang, et al. Attitude control of flapping-wing aircraft based on adaptive terminal sliding mode[J]. Control Engineering of China, 2020, 27(2): 309-315. | |
| 14 | Bluman J E, Kang C K, Shtessel Y B. Sliding mode control of a biomimetic flapping wing micro air vehicle in hover[C]∥AIAA Atmospheric Flight Mechanics Conference,Denver, USA, 2017: 1633. |
| 15 | Zheng H, Zhang Y, Husnain H M, et al. Swarm intelligence based model predictive control strategy for optimal state control of discrete time-varying MIMO linear systems [J]. International Journal of Control, Automation, and Systems, 2022, 20(10): 3433-3444. |
| 16 | Berberich J, Köhler J, Muller M A. Data-driven model predictive control with stability and robustness guarantees[J]. IEEE Transactions on Automatic Control, 2021 66(4): 1702-1717. |
| 17 | Karg B, Lucia S. Efficient representation and approximation of model predictive control laws via deep learning[J]. IEEE Transactions on Cybernetics, 2020, 50(9): 3866-3878. |
| 18 | Zhang L, Xie J, Koch C R. Model predictive control of jacket tubular reactors with a reversible exothermic reaction[J]. Industrial and Engineering Chemistry Research, 2020, 59(42): 18921-18936. |
| 19 | Zhang Y, Zheng H, Xu J, et al. Radial basis function model-based adaptive model predictive control for trajectory tracking of a clapping-wing micro air vehicle[J]. Aerospace, 2023, 10(3): No.253. |
| 20 | 鲜斌, 李杰奇, 古训. 基于非线性扰动观测器的无人机地面效应补偿[J]. 吉林大学学报:工学版, 2022, 52(8): 1926-1933. |
| Xian Bin, Li Jie-qi, Gu Xun. Ground effects compensation for an unmanned aerial vehicle via nonlinear disturbance observer[J]. Journal of Jilin University (Engineering and Technology Edition), 2022, 52(8): 1926-1933. |
| [1] | Yan-tao TIAN,Wen-yan YU,Yan-shi JI,bo XIE. Shared controller design for different driving behavior models [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(9): 2676-2686. |
| [2] | Sheng CHANG,Hong-fei LIU,Nai-wei ZOU. H∞ loop shaping robust control of vehicle tracking on variable curvature curve [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(8): 2141-2148. |
| [3] | Bin XIAN,Yin-xin WANG,Ling WANG. Distributed robust tracking control for multiple unmanned aerial vehicles: theory and experimental verification [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(7): 2093-2103. |
| [4] | Xian-yi XIE,Yu-han WANG,Li-sheng JIN,Xin ZHAO,Bai-cang GUO,Ya-ping LIAO,Bin ZHOU,Ke-qiang LI. Intelligent vehicle trajectory tracking control based on adjusting step size of control horizon [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(3): 620-630. |
| [5] | Yan-an ZHANG,Yue-feng DU,Qing-feng MENG,Xiao-yu LI,Lei LIU,Zhong-xiang ZHU. Adaptive control of wet clutch pressure based on improved genetic algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(3): 852-864. |
| [6] | Guo LIU,Jian XIONG,Xiu-jian YANG,Yang-fan HE. Intelligent vehicle trajectory tracking control based on curvature augmentation [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(12): 3717-3728. |
| [7] | Liu ZHANG,Qing-ming ZENG,Huan-yu ZHAO,Guo-wei FAN. Distributed adaptive vibration suppression control method of large solar panels for satellites based on Lyapunov theory [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(9): 2676-2685. |
| [8] | De-jun WANG,Kai-ran ZHANG,Peng XU,Tian-biao GU,Wen-ya YU. Speed planning and control under complex road conditions based on vehicle executive capability [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 643-652. |
| [9] | Bo XIE,Rong GAO,Fu-qiang XU,Yan-tao TIAN. Stability control of human⁃vehicle shared steering system under low adhesion road conditions [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 713-725. |
| [10] | Chong ZHANG,Yun-feng HU,Xun GONG,Yao SUN. Design of model⁃free adaptive sliding mode controller for cathode flow of fuel cell [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(9): 2085-2095. |
| [11] | Yan LIU,Tian-wei DING,Yu-peng WANG,Jing DU,Hong-hui ZHAO. Thermal management strategy of fuel cell engine based on adaptive control strategy [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(9): 2168-2174. |
| [12] | Guang-ming NIE,Bo XIE,Yan-tao TIAN. Design of cooperative adaptive cruise control algorithm based on Frenet framework [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(7): 1687-1695. |
| [13] | Ming LIU,Xue-wen RONG,Yi-bin LI,Shuai-shuai ZHANG,Yan-fang YIN,Jiu-hong RUAN. Speed adaptive control of mobile robot based on terrain clustering analysis [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(4): 1496-1505. |
| [14] | Ting ZHOU,Yu-gong XU,Bin WU. Adaptive fractional PIλDμ sliding mode control method for speed control of spherical robot [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(2): 728-737. |
| [15] | Ji-qing CHEN,Qing-sheng LAN,Feng-chong LAN,Zhao-lin LIU. Trajectory tracking control based on tire force prediction and fitting [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1565-1573. |
|