Journal of Jilin University(Engineering and Technology Edition) ›› 2024, Vol. 54 ›› Issue (2): 550-557.doi: 10.13229/j.cnki.jdxbgxb.20220409
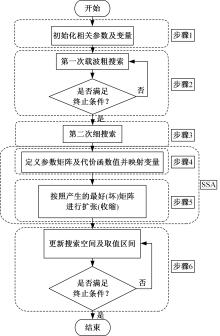
Parameter identification for SCR systems based on improved chaos optimization algorithm
Jing-hua ZHAO1,2( ),Shi-hao DU1,Liang-wei LIU1,3,Yun-feng HU2,Yao SUN2(),Fang-xi XIE2
),Shi-hao DU1,Liang-wei LIU1,3,Yun-feng HU2,Yao SUN2(),Fang-xi XIE2
- 1.College of Computer,Jilin Normal University,Siping 136002,China
2.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
3.College of Information Technology,Changchun Finance College,Changchun 130028,China
CLC Number:
- TP273


| 1 | Zhao J H, Gong X, Hu Y F, et al. An ammonia coverage ratio observing and tracking controller: stability analysis and simulation evaluation[J]. Sci China Inf Sci, 2019, 62: 062201. |
| 2 | Zhang H, Chen P E, Wang J M, et al. Integrated study of inland-vessel diesel engine two-cell SCR systems with dynamic references[J]. IEEE/ASME Transactions on Mechatronics, 2017, 22(3): 1195-1206. |
| 3 | Zhao J H, Hu Y F, Gong X, et al. Modelling and control of urea-SCR systems through the triple-step non-linear method in consideration of time-varying parameters and reference dynamics[J]. Transactions of the Institute of Measurement Control, 2018, 40(1): 287-302. |
| 4 | Zhao J H, Zhou S T, Hu Y F, et al. Open-source dataset for control-oriented modelling in diesel engines[J]. Sci China Inf Sci, 2019, 62(7): 077201. |
| 5 | Chen P E, Wang J M. Coordinated active thermal management and selective catalytic reduction control for simultaneous fuel economy improvement and emissions reduction during low-temperature operations[J]. Dyn Syst Meas Control, 2015, 13(7): 634-641. |
| 6 | Zhao J H, Hu Y F, Gao B Z. Sequential optimization of eco-driving taking into account fuel economy and emissions[J]. IEEE Access, 2019, 4(99): 1-13. |
| 7 | Ma Y, Wang J M. Integrated power management and aftertreatment system control for hybrid electric vehicles with road grade preview[J]. IEEE Trans Veh Technol, 2017, 66: 10935-10945. |
| 8 | Luo X. Parameter identification of the photovoltaic cell model with a hybrid Jaya-NM algorithm[J]. International Journal for Light Electron Optics, 2018, 171(1): 200-203. |
| 9 | Gao F C, Han L X. Implementing the Nelder-Mead simplex algorithm with adaptive parameters[J]. Computational Optimization and Applications, 2010, 51(1): 259-277. |
| 10 | Liu Y, Heidari A, Ye X, et al. Boosting slime mould algorithm for parameter identification of photovoltaic models[J]. Energy, 2021(5): 121-128. |
| 11 | Tang Z Z, Gu Q F, Ni W, et al. Parameter identification of ship integrative load model based on improved chaos optimization algorithm[J]. Ship Science and Technology, 2017, 12(1): 56-63. |
| 12 | Yuan X F, Zhang T, Dai X S, et al. Master-slave model-based parallel chaos optimization algorithm for parameter identification problems[J]. 2016, 83(3): 1727-1741. |
| 13 | 李冬琴. 加速混沌优化算法的改进及其在船型论证中的应用[J].江苏科技大学学报:自然科学版, 2010, 24(4): 5-11. |
| Li Dong-qin. Improvement of stepped-up chaos optimization algorithm and its application to ship demonstration[J]. Journal of Jiangsu University of Science and Technology (Natural Science Edition), 2010, 24(4): 5-11. | |
| 14 | Zhang G H, Xing K Y, Zhang G Y, et al. Memetic algorithm with meta-Lamarckian learning and simplex search for distributed flexible assembly permutation flowshop scheduling problem[J]. IEEE Access, 2020, 8: 96115-96128. |
| 15 | Lu Y T, Zhou Y Q, Wu X L. A hybrid lightning search algorithm-simplex method for global optimization[J]. Discrete Dynamics in Nature Society, 2017(2017): 1-23. |
| 16 | Kong X S, Zheng D B. A knowledge-informed simplex search method based on historical quasi-gradient estimations and its application on quality control of medium voltage insulators[J]. Processes, 2021, 9(5): 770-779. |
| 17 | Chen H, Li W, Yang X. A whale optimization algorithm with chaos mechanism based on quasi-opposition for global optimization problems[J]. Expert Systems with Applications, 2020, 158(113): 6-12. |
| 18 | Musanna F, Dangwal D, Kumar S. Novel image encryption algorithm using fractional chaos and cellular neural network[J]. Journal of Ambient Intelligence Humanized Computing, 2021(6): 1-22. |
| 19 | 孙耀, 胡云峰, 周杰敏, 等. 基于分层控制器的SCR系统滚动时域优化控制方法[J]. 吉林大学学报: 工学版, 2023, 53(1): 61-71. |
| Sun Yao, Hu Yun-feng, Zhou Jie-min, et al. Moving horizon optimization control of SCR system based on hierarchical controller[J]. Journal of Jilin University (Engineering and Technology Edition), 2023, 53(1): 61-71. | |
| 20 | 赵靖华, 胡云峰, 高炳到, 等. 基于尿素选择催化还原系统的氨覆盖率非线性降维观测器设计[J]. 吉林大学学报: 工学版, 2017, 49(2): 583-590. |
| Zhao Jing-hua, Hu Yun-feng, Gao Bing-zhao, et al. Design of nonlinear reduced-order observer for ammonia coverage based on urea-SCR systems[J]. Journal of Jilin University (Engineering and Technology Edition), 2017, 49(2): 583-590. |
| [1] | Shou-rui WANG,Wu-yin JIN,Zhi-yuan RUI,Xia ZHANG. Payload swing control for 3D overhead crane based on fast non⁃singular terminal sliding mode [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(12): 3508-3517. |
| [2] | Yao SUN,Yun-feng HU,Jie-min ZHOU,Huan CHENG,Ting QU,Jing-hua ZHAO,Hong CHEN. Moving horizon optimization control of SCR system based on hierarchical controller [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(1): 61-71. |
| [3] | Jin-wu GAO,Zhi-huan JIA,Xiang-yang WANG,Hao XING. Degradation trend prediction of proton exchange membrane fuel cell based on PSO⁃LSTM [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(9): 2192-2202. |
| [4] | Jin-wu GAO,Yi-lin WANG,Hua-yang LIU,Yi-da WANG. Decoupling control for proton exchange membrane fuel cell air supply system based on sliding mode observer [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(9): 2156-2167. |
| [5] | Ang LI,Hong-yuan YANG,Xiao-meng LEI,Kai-wen SONG,Cheng-hui QIAN. Closed-loop control of traveling attitude of hexapod robot based on equivalent connecting link model [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(7): 1696-1708. |
| [6] | Hang ZHU,Han-bo YU,Jia-hui LIANG,Hong-ze LI. Improved algorithm of UAV search based on electric field model and simulation analysis [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(12): 3029-3038. |
| [7] | Bin XIAN,Shi-jing ZHANG,Xiao-wei HAN,Jia-ming CAI,Ling WANG. Trajectory planning for unmanned aerial vehicle slung⁃payload aerial transportation system based on reinforcement learning [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2259-2267. |
| [8] | Fang XU,Jun-ming ZHANG,Yun-feng HU,Ting QU,Yi QU,Qi-fang LIU. Lateral and longitudinal coupling real⁃time predictive controller for intelligent vehicle path tracking [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2287-2294. |
| [9] | Guang-xin HAN,Ju-le ZHAO,Yun-feng HU. Moving horizon linear quadratic regulator control for ball and plate system with input constraints [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 1982-1989. |
| [10] | Shu-you YU,Huan CHANG,Ling-yu MENG,Yang GUO,Ting QU. Disturbance observer based moving horizon control for path following problems of wheeled mobile robots [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(3): 1097-1105. |
| [11] | Ai-guo WU,Jun-qing HAN,Na DONG. Adaptive sliding mode control based on ultra⁃local model for robotic manipulator [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1905-1912. |
| [12] | Wei WANG,Jian-ting ZHAO,Kuan-rong HU,Yong-cang GUO. Trajectory tracking of robotic manipulators based on fast nonsingular terminal sliding mode [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 464-471. |
| [13] | Fu LIU,Yi AN,Bo DONG,Yuan-chun LI. Decentralized energy guaranteed cost decentralized optimal control of reconfigurable robots based on ADP [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(1): 342-350. |
| [14] | Xing-tian QU,Xue-xu WANG,Hui-chao SUN,Kun ZHANG,Long-wei YAN,Hong-yi WANG. Fuzzy self⁃adaptive PID control for fused deposition modeling 3D printer heating system [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(1): 77-83. |
| [15] | Miao-miao MA,Jun-jun PAN,Xiang-jie LIU. Model predictive load frequency control of microgrid with electrical vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(5): 1644-1652. |
|
||