Journal of Jilin University(Engineering and Technology Edition) ›› 2022, Vol. 52 ›› Issue (12): 3029-3038.doi: 10.13229/j.cnki.jdxbgxb20210403
Previous Articles Next Articles
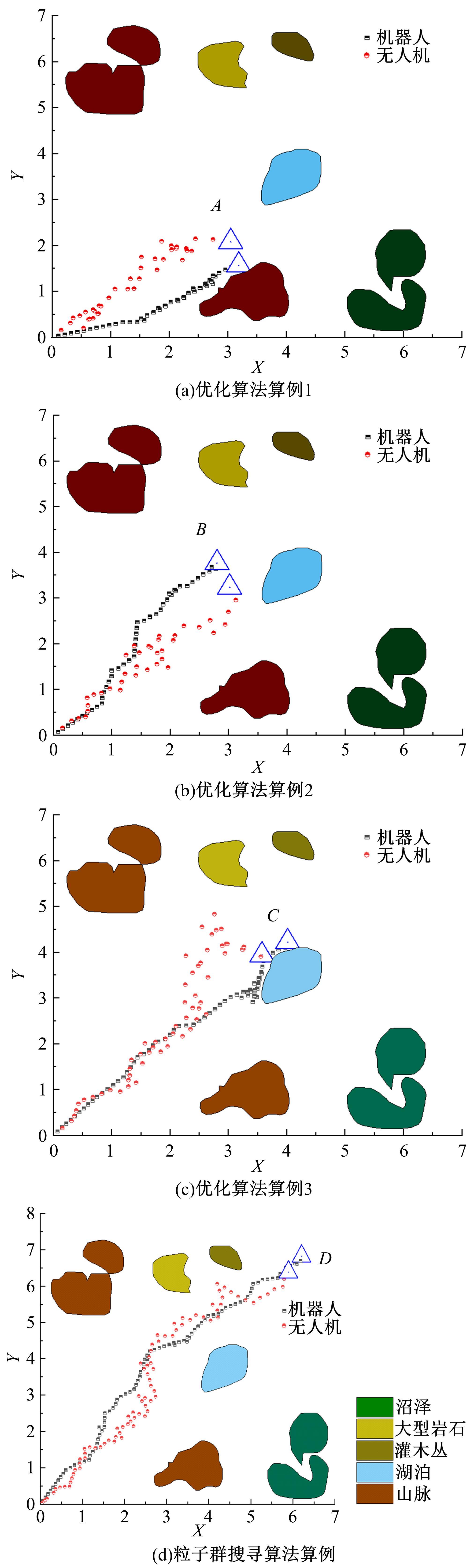
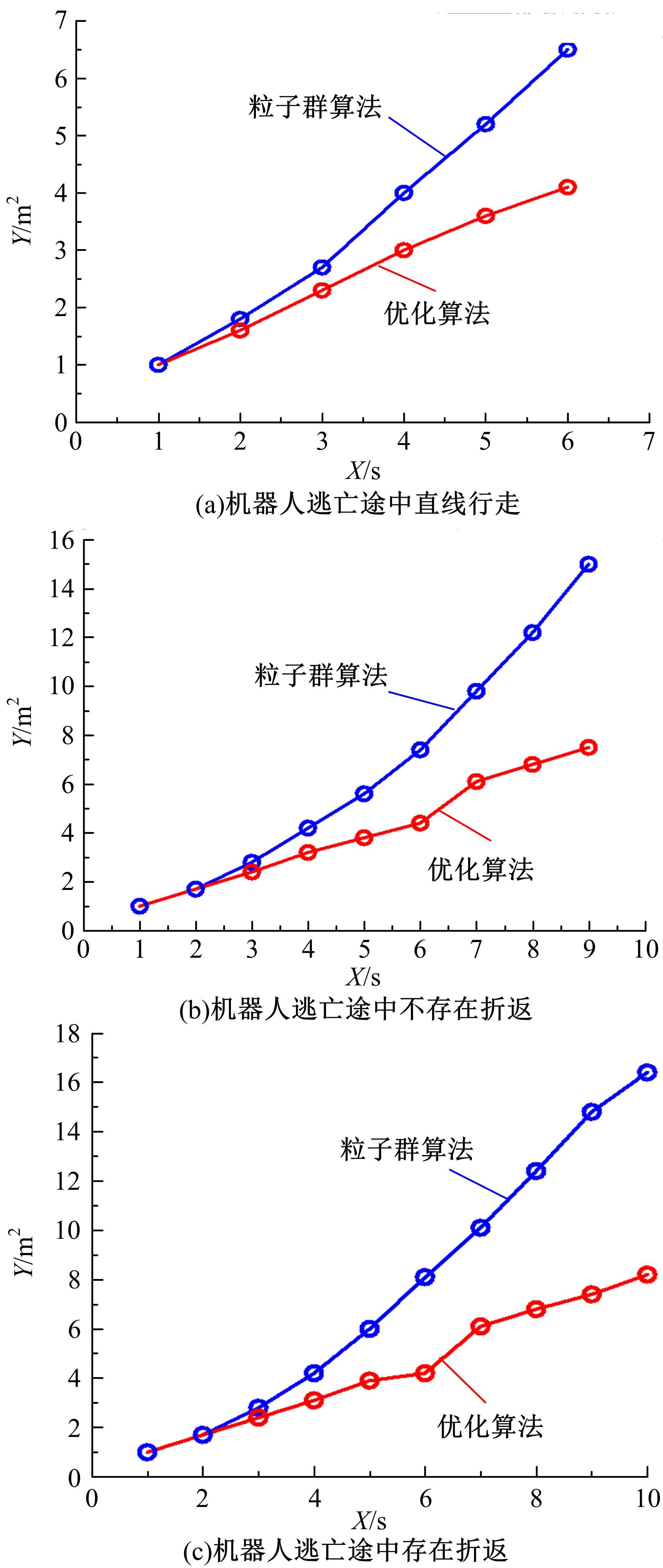
Improved algorithm of UAV search based on electric field model and simulation analysis
Hang ZHU( ),Han-bo YU,Jia-hui LIANG,Hong-ze LI
),Han-bo YU,Jia-hui LIANG,Hong-ze LI
- College of Mechanical and Aerospace Engineering,Jilin University,Changchun 130022,China
CLC Number:
- V249






| 1 | Goerzen C, Kong Z, Mettler B. A survey of motion planning algorithms from the perspective of autonomous UAV guidance[J]. Journal of Intelligent and Robotic Systems, 2010, 57(11): 65-100. |
| 2 | Huang Li-wei, Hong Qu, Peng Ji, et al. A novel coordinated path planning method using k-degree smoothing for multi-UAVs[J]. Applied Soft Computing, 2016, 48(11): 182-192. |
| 3 | Duan Hai-bin, Zhang Xiang-yin, Wu Jiang, et al. Max-min adaptive ant colony optimization approach to multi-UAVs coordinated trajectory replanning in dynamic and uncertain environments[J]. Journal of Bionic Engineering, 2009, 6(2): 161-173. |
| 4 | Dong Shi-you, Zhu Xiao-ping, Long Guo-qing. Cooperative planning method for swarm UAVs based on hierarchical strategy[C]∥3rd International Conference on System Science, Engineering Design and Manufacturing Informatization, Pacific Grove, USA, 2012: 304-307. |
| 5 | Liu Yang, Zhan Xue-jun, Guan Xiang-min, et al. Potential odor intensity grid based UAV path planning algorithm with particle swarm optimization approach[J]. Mathematical Problems in Engineering, 2016, 21(2): 1-16. |
| 6 | Moon S W, Oh E, David H S. An integral framework of task assignment and path planning for multiple unmanned aerial vehicles in dynamic environments[J]. Journal of Intelligent & Robotic Systems, 2013, 70(1-4): 303-313. |
| 7 | Mehrez B, Ahmed B. A novel UAV path planning algorithm to search for floating objects on the ocean surface based on object's trajectory prediction by regression[J]. Robotics and Autonomous Systems, 2021, 135(1): 1-18. |
| 8 | Cheng Ze, Wang Er-gan, Tang Yi-xin, et al. Real-time path planning strategy for UAV based on improved particle swarm optimization[J]. Journal of Computers, 2014, 9(1): 209-214. |
| 9 | Shin J J, Bang H, Morlier J. UAV path planning under dynamic threats using an improved PSO algorithm[J]. International Journal of Aerospace Engineering, 2020, 13(6): 1-17. |
| 10 | Liu Yang, Zhan Xue-jun, Guan Xiang-min, et al. Potential odor intensity grid based UAV path planning algorithm with particle swarm optimization approach[J]. Mathematical Problems in Engineering, 2016, 21(9): 1-16. |
| 11 | Dorigo M, Maniezzo V, Colorni A. Ant system: optimization by a colony of cooperating agents[J]. IEEE Transactions on Cybernetics, 1996, 26(1): 29-41. |
| 12 | Perez-Carabaza S, Besada-Portas E, Lopez-Orozco J A, et al. Ant colony optimization for multi-UAV minimum time search in uncertain domains[J]. Applied Soft Computing, 2018, 62(9): 789-806. |
| 13 | Zhen Zi-yang, Yan Chen, Wen Liang-dong, et al. An intelligent cooperative mission planning scheme of UAV swarm in uncertain dynamic environment[J]. Aerospace Science and Technology, 2020, 100(1): 1-16. |
| 14 | Zhang Lin, Zhu Yi-an, Shi Xian-chen. A hierarchical decision-making method with a fuzzy ant colony algorithm for mission planning of multiple UAVs[J]. Information, 2020, 11(4): No.226. |
| 15 | Michael Faraday. Experimental Researches in Electricity[M]. London: Dover Publications, 2004. |
| 16 | 朱磊,樊继壮,赵杰, 等. 基于栅格法的矿难搜索机器人全局路径规划与局部避障[J]. 中南大学学报:自然科学版, 2011, 42(11): 3421-3428. |
| Zhu Lei, Fan Ji-zhuang, Zhao Jie, et al. Global path planning and local obstacle avoidance of searching robot in mine disasters based on grid method[J]. Journal of Central South University (Science and Technology), 2011, 42(11): 3421-3428. | |
| 17 | Marco D, Gianni D C, Luca M G. Ant algorithms for discrete optimization[J]. Artificial Life, 1999, 5(2): 137-172. |
| 18 | 车翔玖,张孙旻. 基于异步更新策略的蚁群边缘提取算法[J]. 吉林大学学报:工学版, 2017, 47(5): 1577-1582. |
| Che Xiang-jiu, Zhang Sun-min. Edge extraction method based on ant colony asynchronous update strategy[J]. Journal of Jilin University (Engineering and Technology Edition), 2017, 47(5): 1577-1582. | |
| 19 | Yu B, Yang Z Z, Yao B Z. An improved ant colony optimization for vehicle routing problem[J]. Euro-pean Journal of Operational Research, 2009, 196(1): 171-176. |
| 20 | Sande H V, Henrotte F, Hameyer K. The Newton-Raphson method for solving non-linear and anisotropic time-harmonic problems[J]. Compel International Journal for Computation and Mathematics in Electrical and Electronic Engineering, 2004, 23(4): 950-958. |
| 21 | Chen Yong-bo, Luo Guan-chen, Mei Yue-song, et al. UAV path planning using artificial potential field method updated by optimal control theory[J]. International Journal of Systems Science, 2016, 47(5-8): 1407-1420. |
| 22 | Mahamed O, Salah A S. Improved continuous ant colony optimization algorithms for real-world engineering optimization problems[J]. Engineering Applications of Artificial Intelligence, 2019, 85(5): 818-829. |
| 23 | Trivedi R R, Pawaskar D N, Shimpi R P. Enhancement of travel range of electrostatically driven fixed-fixed microbeam in static and dynamic mode using mutated particle swarm optimization[J]. Structural and Multidisciplinary Optimization, 2021, 63(6): 2989-3005. |
| 24 | Chao Luo, Jiang Zhi-peng, Zheng Yuan-jie. A novel reconstructed training-set SVM with roulette cooperative coevolution for financial time series classification[J]. Expert Systems with Applications, 2019, 123(1):283-298. |
| 25 | Mo Pin-qiang, Ma Dan-yang, Zhu Qi-yin. Interpretation of heating and cooling data from thermal cone penetration test using a 1D numerical model and a PSO algorithm[J]. Computers and Geotechnics, 2021, 130(2): 236-248. |
| 26 | Cao Guang-hui, Wang Xing-yuan. Image encryption based on the combination of roulette wheel selection with linear congruence pixel transformation[J]. Multimedia Tools and Applications, 2019, 78(8): 10625-10647. |
| 27 | Qian Wu-wen, Chai Jun-rui, Xu Zeng-guang, et al. Differential evolution algorithm with multiple mutation strategies based on roulette wheel selection[J]. Applied Intelligence, 2018, 48(10): 3612-3629. |
| 28 | Kennedy J, Eberhart R C. Particle swarm optimization[C]∥IEEE International Conference on Neural Networks, Orlando, USA, 1997: 1942-1948. |
| 29 | Kennedy J, Eberhart R C. A discrete binary version of the particle swarm algorithm[C]∥IEEE International Conference on Computational Cybernetics and Simulation, Piscataway, USA, 1997: 4104-4109. |
| 30 | Shorakaei H, Vahdani M, Imani B, et al. Optimal cooperative path planning of unmanned aerial vehicle by a parallel genetic algorithm[J]. Robotic, 2016, 34 (4): 823-836. |
| 31 | Richter C A, Bry A, Roy N. Polynomial trajectory planning for aggressive quadrotor flight in dense in door environments[C]∥Robotics Research, Berlin, Germany, 2016: 649-666. |
| 32 | Wang Bai-lin, Li Tie-ke, Wang Hai-feng, et al. Partheno-genetic algorithm for the permutation flow-shop scheduling problem with maximum waiting times[J]. Applied Mechanics and Materials, 2014, 65(5): 631-632. |
| 33 | Liu L Y, Robin P G. A geometry-independent fine-mesh-based monte carlo importance generator[J]. Nuclear Science and Engineering, 1997, 125(2): 188-195. |
| 34 | Chu Yan-li, Yao Fan, He Yu-yao, et al. An improved multi-node newton iteration search method based on PSO[J]. OPTIK, 2021, 232(5): 169-177. |
| 35 | Cristian D C, Carlos V S, Jesus A L, et al. A cascade hybrid PSO feed-forward neural network model of a biomass gasification plant for covering the energy demand in an AC microgrid[J]. Energy Conversion and Management, 2021, 232(2): 322-338. |
| 36 | Chakraborty T, Banik S K, Bhadra A K, et al. Dynamically learned PSO based neighborhood influenced fuzzy c-means for pre-treatment and post-treatment organ segmentation from CT images[J]. Computer Methods and Programs in Biomedicine, 2021, 202(2): 196-204. |
| 37 | Song Bao-ye, Wang Zi-dong, Zou Lei. An improved PSO algorithm for smooth path planning of mobile robots using continuous high-degree Bezier curve[J]. Applied Soft Computing, 2021, 100(1): 162-174. |
| [1] | Jin-wu GAO,Zhi-huan JIA,Xiang-yang WANG,Hao XING. Degradation trend prediction of proton exchange membrane fuel cell based on PSO⁃LSTM [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(9): 2192-2202. |
| [2] | Jin-wu GAO,Yi-lin WANG,Hua-yang LIU,Yi-da WANG. Decoupling control for proton exchange membrane fuel cell air supply system based on sliding mode observer [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(9): 2156-2167. |
| [3] | Ang LI,Hong-yuan YANG,Xiao-meng LEI,Kai-wen SONG,Cheng-hui QIAN. Closed-loop control of traveling attitude of hexapod robot based on equivalent connecting link model [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(7): 1696-1708. |
| [4] | Guang-xin HAN,Ju-le ZHAO,Yun-feng HU. Moving horizon linear quadratic regulator control for ball and plate system with input constraints [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 1982-1989. |
| [5] | Bin XIAN,Shi-jing ZHANG,Xiao-wei HAN,Jia-ming CAI,Ling WANG. Trajectory planning for unmanned aerial vehicle slung⁃payload aerial transportation system based on reinforcement learning [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2259-2267. |
| [6] | Fang XU,Jun-ming ZHANG,Yun-feng HU,Ting QU,Yi QU,Qi-fang LIU. Lateral and longitudinal coupling real⁃time predictive controller for intelligent vehicle path tracking [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 2287-2294. |
| [7] | Shu-you YU,Huan CHANG,Ling-yu MENG,Yang GUO,Ting QU. Disturbance observer based moving horizon control for path following problems of wheeled mobile robots [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(3): 1097-1105. |
| [8] | Ai-guo WU,Jun-qing HAN,Na DONG. Adaptive sliding mode control based on ultra⁃local model for robotic manipulator [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1905-1912. |
| [9] | Wei WANG,Jian-ting ZHAO,Kuan-rong HU,Yong-cang GUO. Trajectory tracking of robotic manipulators based on fast nonsingular terminal sliding mode [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 464-471. |
| [10] | Fu LIU,Yi AN,Bo DONG,Yuan-chun LI. Decentralized energy guaranteed cost decentralized optimal control of reconfigurable robots based on ADP [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(1): 342-350. |
| [11] | Xing-tian QU,Xue-xu WANG,Hui-chao SUN,Kun ZHANG,Long-wei YAN,Hong-yi WANG. Fuzzy self⁃adaptive PID control for fused deposition modeling 3D printer heating system [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(1): 77-83. |
| [12] | Miao-miao MA,Jun-jun PAN,Xiang-jie LIU. Model predictive load frequency control of microgrid with electrical vehicles [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(5): 1644-1652. |
| [13] | Shu⁃you YU,Lei TAN,Wu⁃yang WANG,Hong CHEN. Control of active four wheel steering vehicle based ontriple⁃step method [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 934-942. |
| [14] | Hai⁃ying WEN,Xiang REN,Wei⁃liang XU,Ming CONG,Wen⁃long QIN,Shu⁃hai HU. Bionic design and experimental test of temporomandibular joint for masticatory robot [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 943-952. |
| [15] | GU Wan-li,WANG Ping,HU Yun-feng,CAI Shuo,CHEN Hong. Nonlinear controller design of wheeled mobile robot with H∞ performance [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1811-1819. |
|