Journal of Jilin University(Engineering and Technology Edition) ›› 2019, Vol. 49 ›› Issue (3): 943-952.doi: 10.13229/j.cnki.jdxbgxb20180081
Previous Articles Next Articles
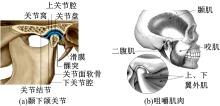
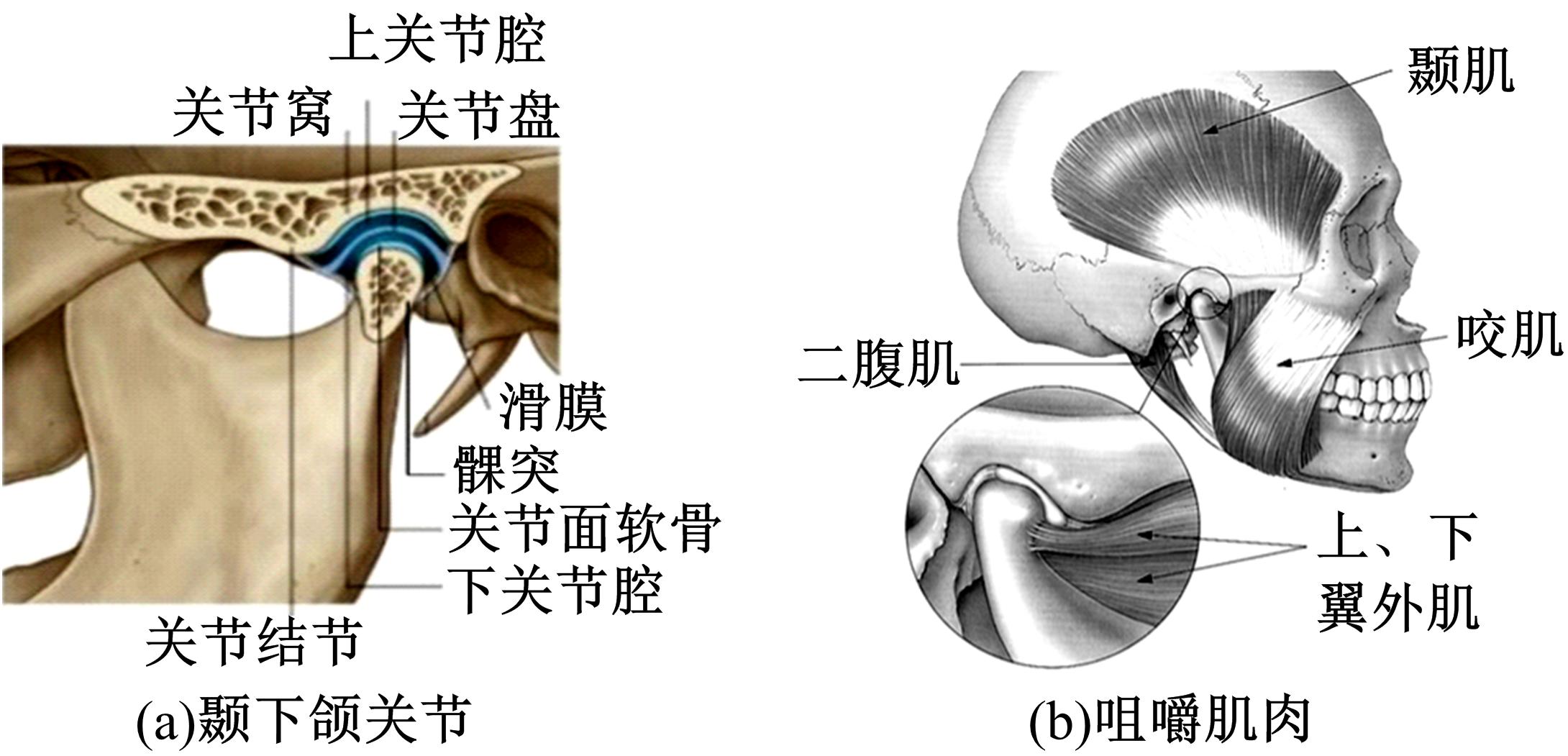
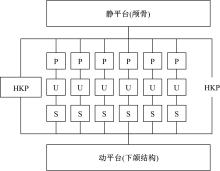
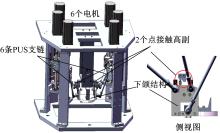
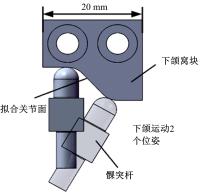
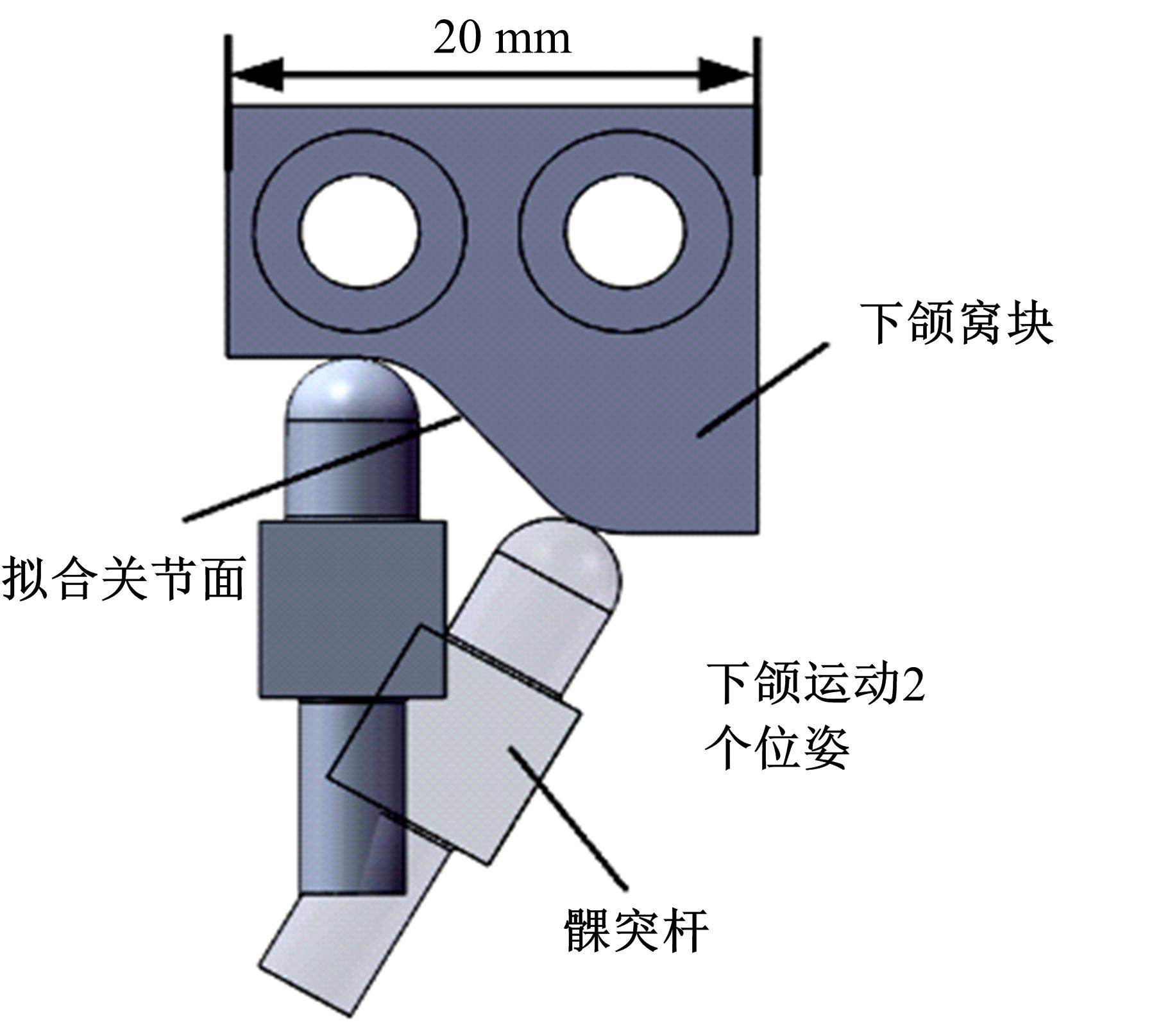
Bionic design and experimental test of temporomandibular joint for masticatory robot
Hai⁃ying WEN1( ),Xiang REN2(),Wei⁃liang XU3,Ming CONG4,Wen⁃long QIN4,Shu⁃hai HU2
),Xiang REN2(),Wei⁃liang XU3,Ming CONG4,Wen⁃long QIN4,Shu⁃hai HU2
- 1. School of Control Science and Engineering, Dalian University of Technology, Dalian 116024, China
2. College of Stomatology, Dalian Medical University, Dalian 116044, China
3. Department of Mechanical Engineering, The University of Auckland, Auckland 1142, New Zealand
4. School of Mechanical Engineering, Dalian University of Technology, Dalian 116024, China
CLC Number:
- TP29












| 1 | 谭民,王硕. 机器人技术研究进展[J]. 自动化学报,2013,39(7):963⁃972. |
| TanMin, WangShuo. Research progress on robotics[J]. Acta Automatica Sinica,2013,39(7):963⁃972. | |
| 2 | 祁若龙,张伟,王铁军,等. 仿人头颈部机器人跟踪运动控制[J]. 吉林大学学报:工学版,2016,46(5):1595⁃1601. |
| QiRuo⁃long, ZhangWei, WangTie⁃jun, et al. Tracking motion control method of humanoid head and neck robot[J]. Journal of Jilin University(Engineering and Technology Edition),2016,46(5):1595⁃1601. | |
| 3 | 曹福成,邢笑雪,李元春,等. 下肢康复机器人轨迹自适应滑模阻抗控制[J]. 吉林大学学报:工学版,2016,46(5):1602⁃1608. |
| CaoFu⁃cheng, XingXiao⁃xue, LiYuan⁃chun, et al. Adaptive trajectory sliding mode impedance control for lower limb rehabilitation robot[J]. Journal of Jilin University(Engineering and Technology Edition),2016,46(5):1602⁃1608. | |
| 4 | 刘少刚,郭云龙,贾鹤鸣. 基于直线特征提取匹配搜救机器人的同步定位与地图构建[J]. 吉林大学学报:工学版,2013,43(4):1035⁃1044. |
| LiuShao⁃gang, GuoYun⁃long, JiaHe⁃ming. Rescue robot simultaneous localization and mapping based on extraction and matching of line features[J]. Journal of Jilin University(Engineering and Technology Edition),2013,43(4):1035⁃1044. | |
| 5 | XuW, BronlundJ E. Mastication Robots[M]. Berlin:Springer,2010. |
| 6 | WenH Y, XuW L, CongM. Kinematic model and analysis of an actuation redundant parallel robot with higher kinematic pairs for jaw movement[J]. IEEE Transactions on Industrial Electronics,2015,62(3):1590⁃1598. |
| 7 | WangL, SadlerJ, BreedingL, et al. An in vitro study of implant⁃tooth⁃supported connections using a robot test system[J]. Journal of Biomechanical Engineering,1999,121(3):290⁃297. |
| 8 | 温海营,丛明,王贵飞,等. 冗余驱动仿下颌运动机器人工作空间分析及试验验证[J]. 机器人,2015,37(3):286⁃297. |
| WenHai⁃ying,CongMing,WangGui⁃fei, et al. Workspace analysis and experimental verification of a redundantly actuated jaw movement robot[J]. Robot,2015,37(3):286⁃297. | |
| 9 | CelebiN, RohnerE C, GatenoJ, et al. Development of a mandibular motion simulator for total joint replacement[J]. Journal of Oral and Maxillofacial Surgery,2011,69(1):66⁃79. |
| 10 | WangG, CongM, XuW, et al. A biomimetic chewing robot of redundantly actuated parallel mechanism[J]. Industrial Robot: An International Journal,2015,42(2):103⁃109. |
| 11 | WenH Y, CongM, WangG F. Experimental verification of workspace and mouth⁃opening movement of a redundantly actuated humanoid chewing robot[J]. Industrial Robot: An International Journal,2015,42(5):406⁃415. |
| 12 | XuW L, LewisD, BronlundJ E, et al. Mechanism, design and motion control of a linkage chewing device for food evaluation[J]. Mechanism and Machine Theory,2008,43(3):376⁃389. |
| 13 | XuW L, PapJ S, BronlundJ. Design of a biologically inspired parallel robot for foods chewing[J]. IEEE Transactions on Industrial Electronics,2008,55(2):832⁃841. |
| 14 | 孙钟雷,孙永海,万鹏,等. 仿生咀嚼装置设计与试验[J]. 农业机械学报,2011,42(8):214⁃218. |
| SunZhong⁃lei, SunYong⁃hai, WanPeng, et al. Design and experiment on bionic chewing equipment[J]. Transactions of the Chinese Society for Agricultural Machinery,2011,42(8):214⁃218. | |
| 15 | YuJ H, LiX F, ZhouH, et al. Research on workspace of masticatory bionic robot based on the 3/3⁃RRRS parallel manipulator[J]. Advanced Materials Research,2013,655:1092⁃1095. |
| 16 | 王倩竹. 咀嚼模拟机器人设计与分析[D]. 长春:吉林大学生物与农业工程学院,2014. |
| WangQian⁃zhu. Design and analysis of a food mastication robot[D]. Changchun: College of Biological and Agricultural Engineering,Jilin University,2014. | |
| 17 | AlemzadehK, RaabeD. Prototyping artificial jaws for the Bristol Dento⁃Munch Robo⁃Simulator ‘a parallel robot to test dental components and materials’[C]∥Proceedings of 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, Lyon, France,2007:1453⁃1456. |
| 18 | OkinoA, InoueT, TakanobuH, et al. A clinical jaw movement training robot for lateral movement training. In Robotics and Automation[C]∥Proceedings of 20th IEEE International Conference on Robotics and Automation, Taipei, China, 2003:244⁃249. |
| 19 | TakanobuH, TakanishiA, OzawaD, et al. Integrated dental robot system for mouth opening and closing training[C]∥Proceedings of 19th IEEE International Conference on Robotics and Automation, Washington, USA, 2002:1428⁃1433. |
| 20 | BoweyC, BurgessD. Robotic temporomandibular joint[R]. Australia:University of Adelaide,2005. |
| 21 | HayashiT, TanakaS, NakajimaS, et al. Control mechanism of an autonomous jaw⁃movement simulator, JSN/1C, during open⁃close movement[C]∥Proceedings of the 18th Annual International Conference of the IEEE Engineering in Medicine and Biology Society,Amsterdam,Holland, 1996:613⁃614. |
| 22 | AndersonD J. Measurements of stress in mastication[J]. Journal of Dental Research, 1956,41:175⁃189. |
| 23 | GibbsC H, MahanP E, LundeenH E. Occlusal forces during chewing⁃influences of biting strength and food consistency[J]. Journal of Prosthetic Dentistry,1981,46:561⁃567. |
| [1] | Shu⁃you YU,Lei TAN,Wu⁃yang WANG,Hong CHEN. Control of active four wheel steering vehicle based ontriple⁃step method [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 934-942. |
| [2] | GU Wan-li,WANG Ping,HU Yun-feng,CAI Shuo,CHEN Hong. Nonlinear controller design of wheeled mobile robot with H∞ performance [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1811-1819. |
| [3] | LI Zhan-dong,TAO Jian-guo,LUO Yang,SUN Hao,DING Liang,DENG Zong-quan. Design of thrust attachment underwater robot system in nuclear power station pool [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1820-1826. |
| [4] | WANG De-jun, WEI Wei-li, BAO Ya-xin. Actuator fault diagnosis of ESC system considering crosswind interference [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(5): 1548-1555. |
| [5] | YAN Dong-mei, ZHONG Hui, REN Li-li, WANG Ruo-lin, LI Hong-mei. Stability analysis of linear systems with interval time-varying delay [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(5): 1556-1562. |
| [6] | ZHANG Shi-tao, ZHANG Bao, LI Xian-tao, WANG Zheng-xi, TIAN Da-peng. Enhancing performance of FSM based on zero phase error tracking control [J]. 吉林大学学报(工学版), 2018, 48(3): 853-858. |
| [7] | TIAN Yan-tao, ZHANG Yu, WANG Xiao-yu, CHEN Hua. Estimation of side-slip angle of electric vehicle based on square-root unscented Kalman filter algorithm [J]. 吉林大学学报(工学版), 2018, 48(3): 845-852. |
| [8] | WANG Lin, WANG Hong-guang, SONG Yi-feng, PAN Xin-an, ZHANG Hong-zhi. Behavior planning of a suspension insulator cleaning robot for power transmission lines [J]. 吉林大学学报(工学版), 2018, 48(2): 518-525. |
| [9] | HU Yun-feng, WANG Chang-yong, YU Shu-you, SUN Peng-yuan, CHEN Hong. Structure parameters optimization of common rail system for gasoline direct injection engine [J]. 吉林大学学报(工学版), 2018, 48(1): 236-244. |
| [10] | ZHU Feng, ZHANG Bao, LI Xian-tao, WANG Zheng-xi, ZHANG Shi-tao. Gyro signal processing based on strong tracking Kalman filter [J]. 吉林大学学报(工学版), 2017, 47(6): 1868-1875. |
| [11] | JIN Chao-qiong, ZHANG Bao, LI Xian-tao, SHEN Shuai, ZHU Feng. Friction compensation strategy of photoelectric stabilized platform based on disturbance observer [J]. 吉林大学学报(工学版), 2017, 47(6): 1876-1885. |
| [12] | FENG Jian-xin. Recursive robust filtering for uncertain systems with delayed measurements [J]. 吉林大学学报(工学版), 2017, 47(5): 1561-1567. |
| [13] | SHAO Ke-yong, CHEN Feng, WANG Ting-ting, WANG Ji-chi, ZHOU Li-peng. Full state based adaptive control of fractional order chaotic system without equilibrium point [J]. 吉林大学学报(工学版), 2017, 47(4): 1225-1230. |
| [14] | XU Jin-kai, WANG Yu-tian, ZHANG Shi-zhong. Dynamic characteristics of a heavy duty parallel mechanism with actuation redundancy [J]. 吉林大学学报(工学版), 2017, 47(4): 1138-1143. |
| [15] | HU Yun-feng, GU Wan-li, LIANG Yu, DU Le, YU Shu-you, CHEN Hong. Start-stop control of hybrid vehicle based on nonlinear method [J]. 吉林大学学报(工学版), 2017, 47(4): 1207-1216. |
|
||