Journal of Jilin University(Engineering and Technology Edition) ›› 2024, Vol. 54 ›› Issue (1): 86-98.doi: 10.13229/j.cnki.jdxbgxb.20220309
Previous Articles Next Articles
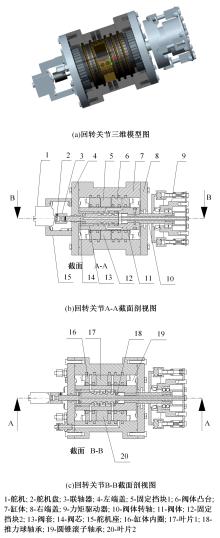
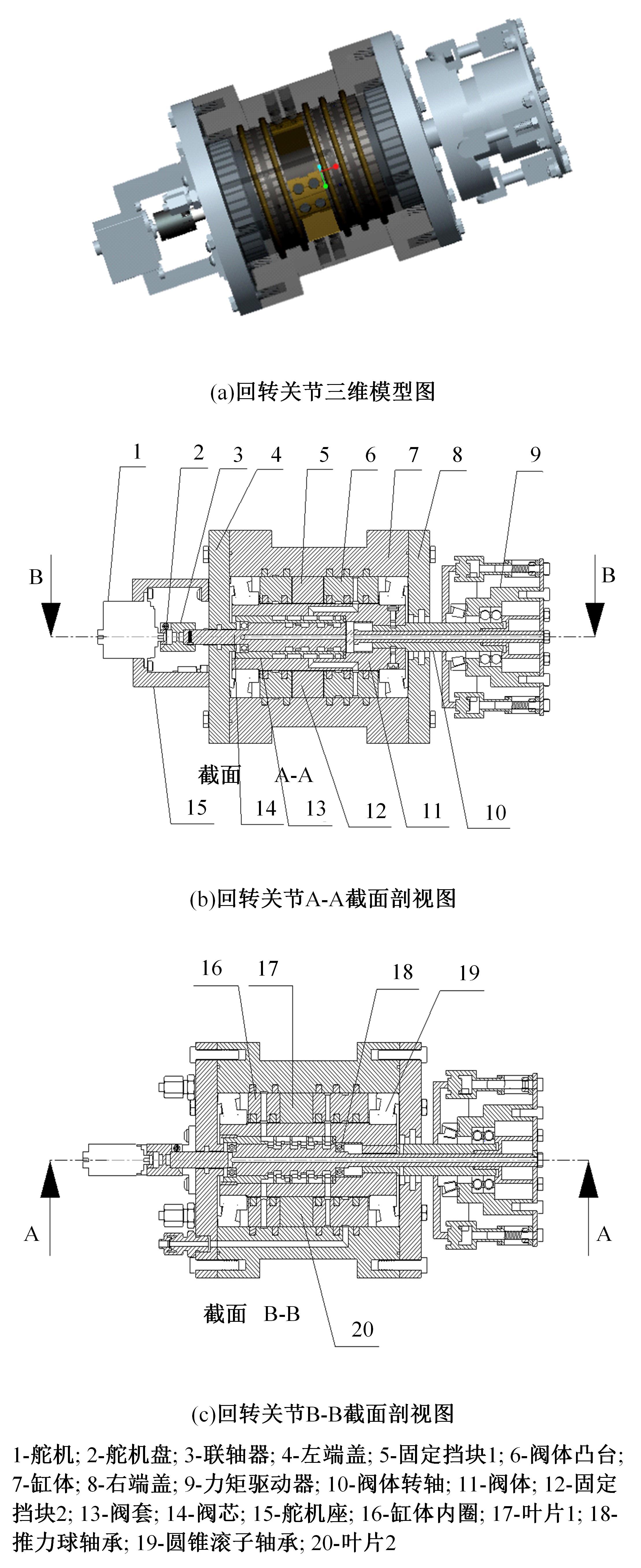
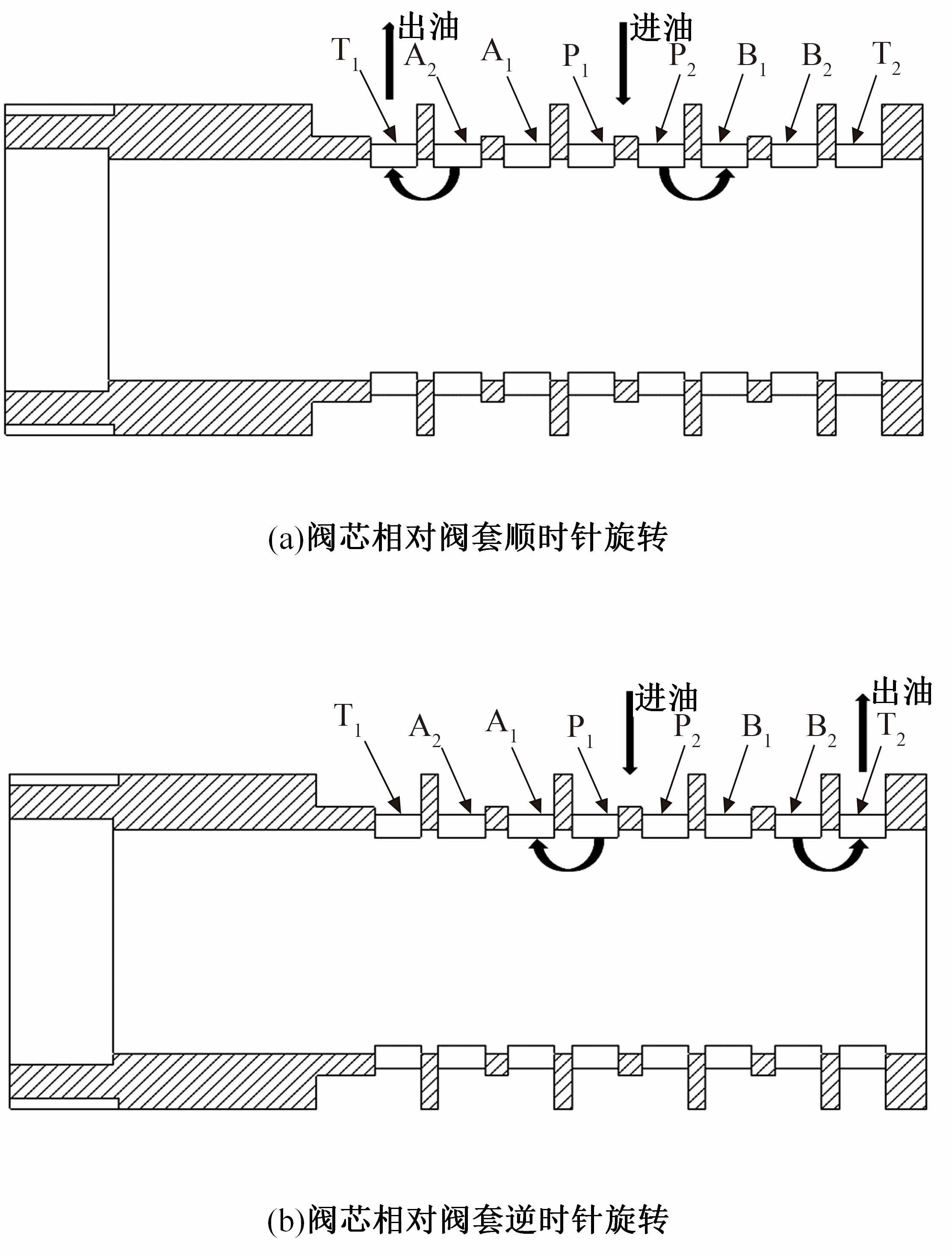
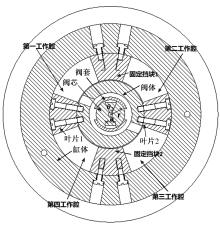
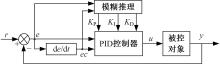
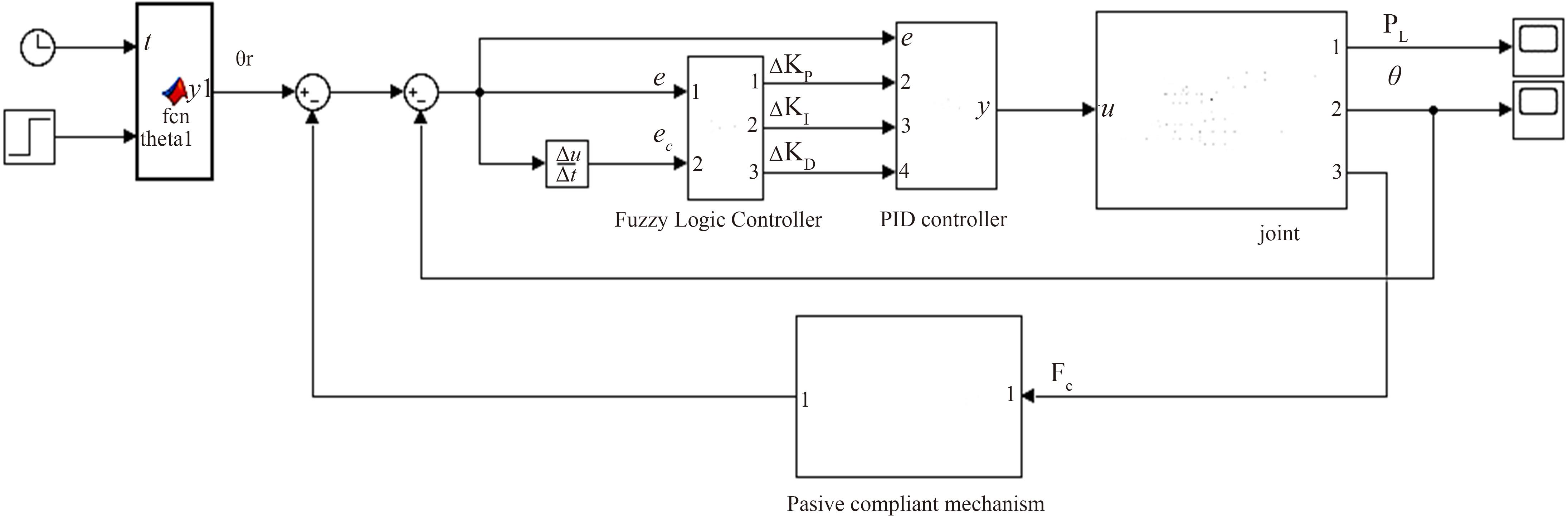
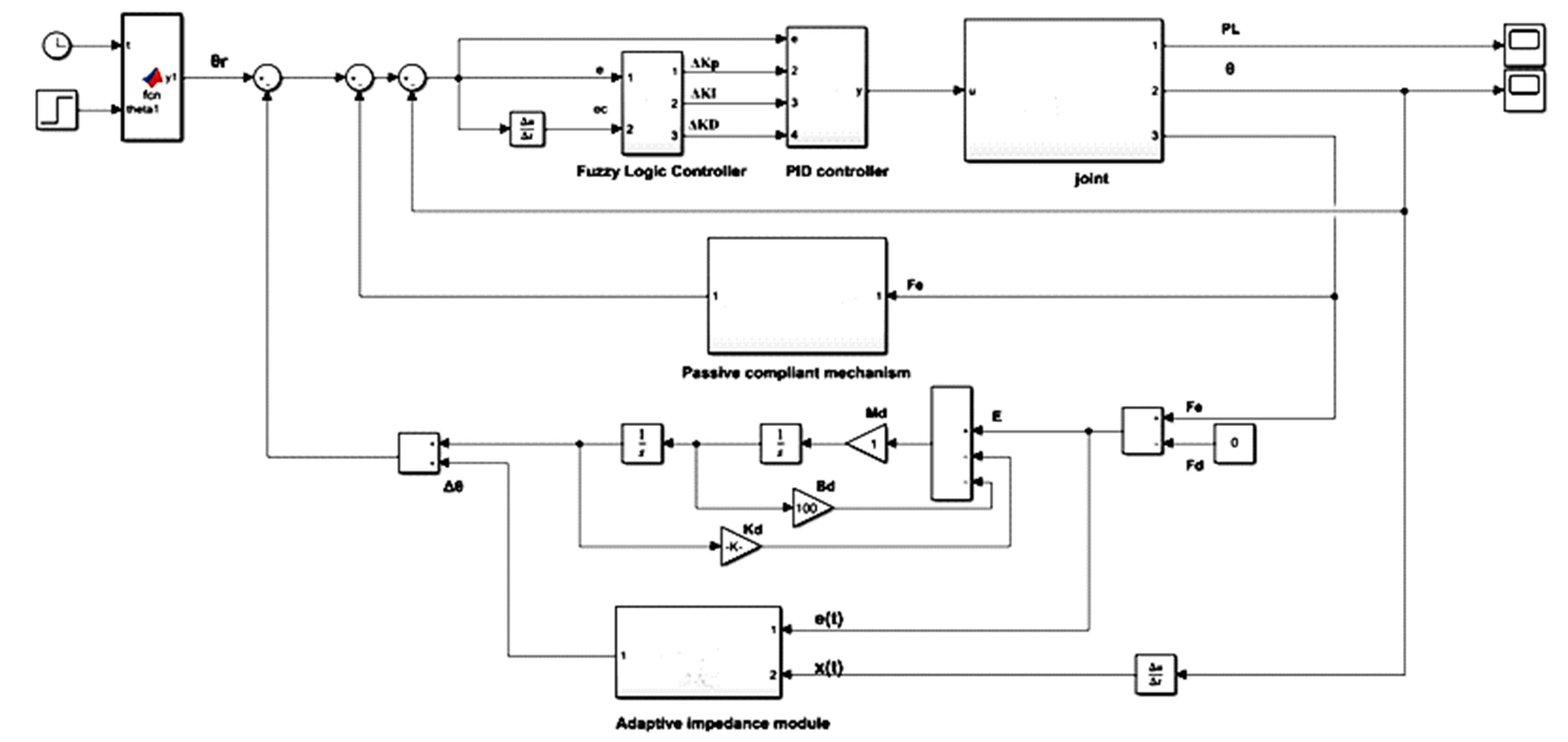
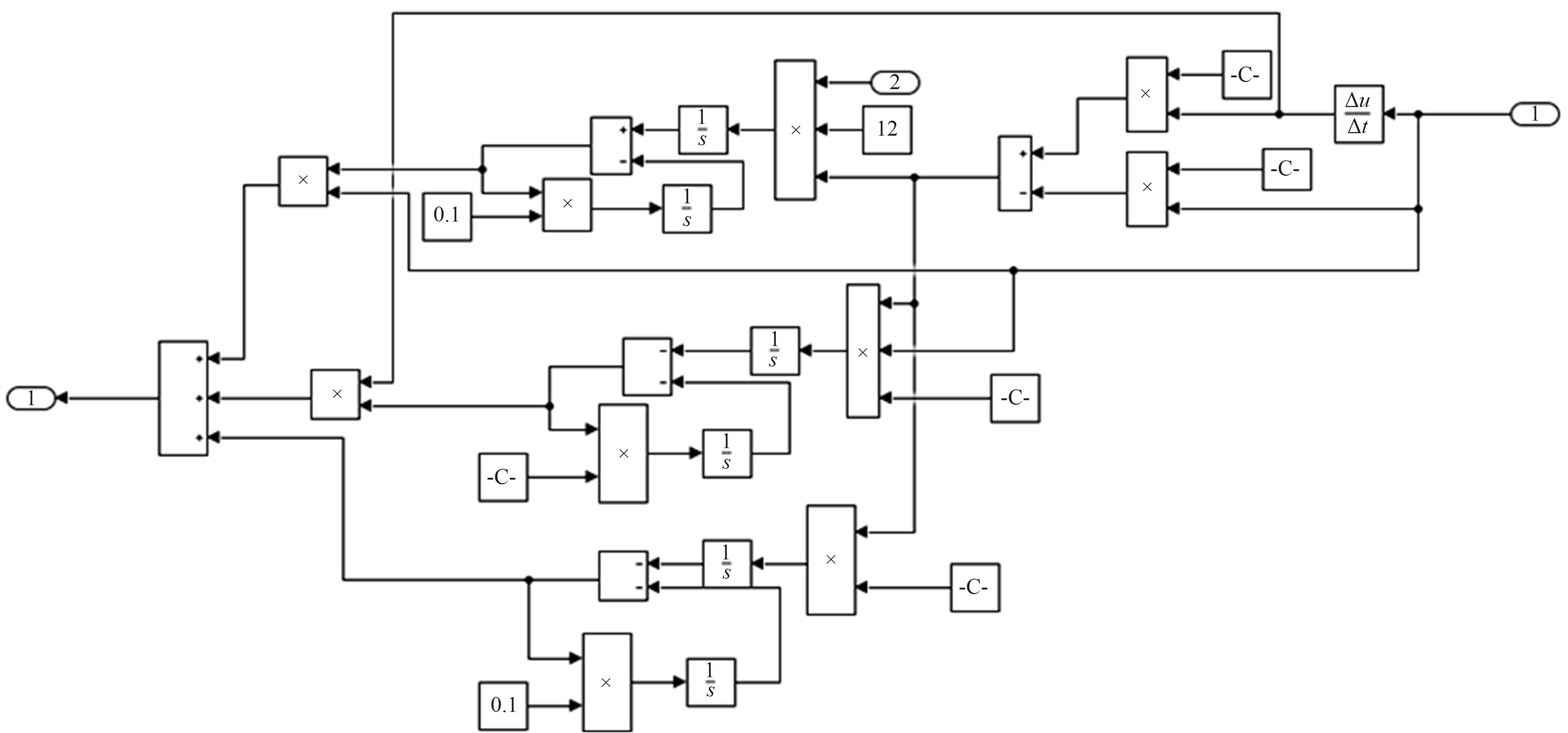
Analysis of active compliance and passive compliance combined control of double blade hydraulic joint
Hui ZHAO1,2( ),Fa-qiang ZHU1,Lin JIANG1,2(),Shi-hu WANG1
),Fa-qiang ZHU1,Lin JIANG1,2(),Shi-hu WANG1
- 1.Key Laboratory of Metallurgical Equipment and Control Technology of Ministry of Education,Wuhan University of Science and Technology,Wuhan 430081,China
2.Institute of Robotics and Intelligent Systems,Wuhan University of Science and Technology,Wuhan 430081,China
CLC Number:
- TH12

















| 1 | 杨嘉伟. 液压机器人关节柔顺控制的研究与实现[D]. 黑龙江: 哈尔滨工业大学机电工程学院,2015. |
| Yang Jia-wei. Research and implementation of joint compliance control of hydraulic robot[D]. Heilongjiang: School of Mechanical and Electrical Engineering, Harbin Institute of Technology, 2015 | |
| 2 | Peng J, Yang Z, Ma T. Position/force tracking impedance control for robotic systems with uncertainties based on adaptive Jacobian and neural network[J]. Complexity, 2019: No.1406534. |
| 3 | 张程博. 液压驱动足式机器人单腿关节柔顺控制研究[D]. 哈尔滨: 哈尔滨工业大学机电工程学院,2019. |
| Zhang Cheng-bo. Research on compliance control of single leg joint of hydraulically driven foot robot[D]. Harbin: School of Mechanical and Electrical Engineering, Harbin Institute of technology, 2019. | |
| 4 | Hogan N. Impedance control: an approach to manipulation: part I-theory, implementation and applications[J]. Journal of Dynamic Systems, Measurement, and Control, 1985,107(1): 1-24. |
| 5 | 李扬. 主被动相融合的抗冲击柔性关节及其控制研究[D]. 哈尔滨: 哈尔滨工业大学机电工程学院,2017. |
| Li Yang. Research on impact resistant flexible joint with active passive fusion and its control[D]. Harbin: School of Mechanical and Electrical Engineering, Harbin Institute of Technology, 2017. | |
| 6 | 尹正乾.上肢康复机器人主被动控制研究[D]. 哈尔滨: 哈尔滨工程大学机电工程学院, 2014. |
| Yin Zheng-qian. Research on active and passive control of upper limb rehabilitation robot[D]. Harbin: School of Mechanical and Electrical Engineering, Harbin Engineering University, 2014. | |
| 7 | 邢宏军.基于主被动柔顺的机器人旋拧阀门作业研究[D]. 哈尔滨: 哈尔滨工业大学机电工程学院,2017. |
| Xing Hong-jun. Research on robot screwing valve operation based on active passive compliance[D]. Harbin: School of Mechanical and Electrical Engineering, Harbin Institute of Technology, 2017. | |
| 8 | 柯贤锋, 王军政, 何玉东, 等.基于力反馈的液压足式机器人主/被动柔顺性控制[J]. 机械工程学报,2017, 53(1): 13-20. |
| Ke Xian-feng, Wang Jun-zheng, He Yu-dong, et al. Active/passive compliance control of hydraulic foot robot based on force feedback[J]. Journal of Mechanical Engineering, 2017, 53(1): 13-20. | |
| 9 | 刘纯键, 蒋林, 任利胜, 等. 液压伺服被动柔顺关节的柔顺特性分析[J]. 武汉科技大学学报: 自然科学版, 2021, 44(4): 270-276. |
| Liu Chun-jian, Jiang Lin, Ren Li-sheng, et al. Analysis of compliance characteristics of hydraulic servo passive compliant joint[J]. Journal of Wuhan University of science and Technology (Natural Science Edition), 2021, 44 (4): 270-276. | |
| 10 | Dong J, Xu J, Zhou Q, et al. Physical human-robot interaction force control method based on adaptive variable impedance[J]. Journal of the Franklin Institute, 2020, 357(12): 7864-7878. |
| 11 | 刘董, 李京慧, 迟宗涛, 等. 基于模糊PID控制的控温箱设计[J]. 传感器与微系统, 2021, 40(3): 73-76. |
| Liu Dong, Li Jing-hui, Chi zong-tao, et al. Design of temperature control box based on fuzzy PID control[J]. Sensors and Microsystems, 2021, 40 (3): 73-76. | |
| 12 | 金光哲, 段科俊, 王璐. 基于模糊PID控制的恒压浇灌系统研究[J]. 安徽农业科学, 2021, 49(2): 206-210. |
| Jin Guang-zhe, Duan Ke-jun, Wang Lu. Research on constant pressure irrigation system based on Fuzzy PID control[J]. Anhui Agricultural Science, 2021,49(2): 206-210. | |
| 13 | 李焕, 王奉文, 徐世杰, 等. 基于阻抗控制的机械臂末端工具的柔顺控制[J]. 空间控制技术与应用,2019, 45(1): 20-26. |
| Li Huan, Wang Feng-wen, Xu Shi-jie, et al. Compliance control of manipulator end tool based on impedance control[J]. Space Control Technology and Application, 2019, 45 (1): 20-26. | |
| 14 | Chen P, Zhao H, Yan X, et al. Force control polishing device based on fuzzy adaptive impedance control[C]//International Conference on Intelligent Robotics and Applications, Shanghai, China, 2019: 181-194. |
| 15 | 王懂. 基于阻抗控制的机械臂力/位置控制关键技术研究[D]. 济南: 山东大学机械工程学院, 2018. |
| Wang Dong. Research on key technologies of force/position control of manipulator based on impedance control[D]. Jinan: School of Mechanical Engineering, Shandong University, 2018. |
| [1] | Shu-jiang CHEN,Chun-wang XU,Chang-hou LU,Kang WANG. Analysis and experiment of active motion control of hydrostatic spindle embedded with control recess [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(4): 973-981. |
| [2] | Jian-xin FENG,Qiang WANG,Ya-lei WANG,Biao XU. Fuzzy PID control of ultrasonic motor based on improved quantum genetic algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(6): 1990-1996. |
| [3] | Ji-hai JIANG,Cun-ran ZHAO,Guan-long ZHANG,Ming-yang CHE. Tribological properties of coating materials of tribopairs for aviation kerosene piston pump [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(1): 147-153. |
| [4] | ZHANG Ru-bin, ZHAN Li-kui, PENG Wei, SUN Shao-ming, LIU Jun-fu, REN Lei. Constant power control in cardiopulmonary function evaluation and training system [J]. 吉林大学学报(工学版), 2018, 48(4): 1184-1190. |
| [5] | Li Xiang-yu,Gao Zhen-hai, Yuan Chang-bi, Qiao Yan-juan . Environmental evaluation of vehicle cruise control [J]. 吉林大学学报(工学版), 2008, 38(增刊): 28-0031. |
|
||