


{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
基于可穿戴传感系统的人体肢段定位动态评估
[刘坤 , 韩宣, 刘政]
, 韩宣, 刘政]
, 韩宣, 刘政]
|
|


作者简介:刘坤(1981-),男,副教授,博士.研究方向:下肢智能康复训练设备.E-mail:kunliu@jlu.edu.cn
介绍了一种采用双传感器差分算法分析人体肢段双向偏转角并进行肢段定位的新方法;基于本方法开发了一套使用三轴加速度计的可穿戴式传感系统,用于获取和分析下肢肢段前后摆角和左右偏转角信息。为了评估本方法,将该系统分别在二自由度机械臂和受验志愿者大腿上进行了测试。结果表明:在理想条件下,只使用加速度计组成可穿戴式传感系统,通过测量髋关节和大腿上的加速度,就可以得到人体局部坐标系内下肢段定向的动态分析。
A new method using a double-sensor difference based algorithm for analyzing human segment rotational angles in two directions for segmental orientation analysis in three-dimensional (3D) space was presented. A wearable sensor system based only on triaxial accelerometers was developed to obtain the pitch and yaw angles of thigh segment with an accelerometer approximating translational acceleration of the hip joint and two accelerometers measuring the actual accelerations on the thigh. To evaluate the method, the system was tested on a mechanical arm of two degrees of freedom and on the thighs of eight volunteer subjects. The results show that, without integration and switching between different sensors, using only one kind of sensor, the wearable sensor system is suitable for ambulatory analysis of normal gait orientation of thigh and shank in two directions of the segment-fixed local coordinate system in 3D space. It can then be applied to assess spatio-temporal gait parameters and monitoring the gait function of patients in clinical settings.
在医学领域中,人体运动参数,特别是下肢的运动情况对于临床医生制定诊疗方案具有重要作用[ 1, 2]。在量化外科手术效果和评估患者下肢康复运动状况方面,步态分析已经变成一种有效的诊疗参考手段[ 3]。因此,检测下肢段的运动定位情况很有必要。为了实现应用传感器进行步态分析,国内外已研发了多种可穿戴式传感器系统[ 4, 5, 6, 7, 8, 9]。例如,在下肢段运动位置的测量方面,已经可以采用加速度计和(或)陀螺仪估算出下肢关节角度[ 10, 11]。然而,当采用加速度计测量人体下肢段加速度时,测量信号是一个合成加速度,它由重力加速度、平移加速度、肢段旋转加速度及误差信号组成,这些分加速度并不能在测得的加速度中分辨出来[ 12]。文献[13]中通过对陀螺仪测得的角速度进行数值积分获得肢段转动角位移,但是积分结果会由于信号漂移而产生失真。因此,如果仅仅简单地把实际检测得到的合加速度视为所测位置的角加速度,然后直接积分获得肢段角速度和角位移[ 14],尽管受验者肢体在低速运动时,所测加速度已经很接近角加速度,但是实测到的合加速度除了肢段角加速度外,仍然含有以上提到的其他加速度分量,这些必将导致积分误差,使得所求的肢段摆动角速度和角位移并不准确。另外,如果肢段角位移采用含有竖直方向加速度 az的等式 θ=(180 /π×arcsin( az/g))来计算,那么,测量时必须使受验者保持静止,或者在非静止状态下测量时,忽略线性加速度分量。可见这种方法只适合测量静态时的下肢段定位,对于运动的人体,采用这种方法进行下肢定位测量和计算并不十分准确。Luinge和Veltink于2005年提出了另一种方法[ 15],但是在测量过程中需要不断地重新校准陀螺仪的偏移量和方向。文献[16]中提出了一种解决这个矛盾的方法,通过加速度计和陀螺仪的测量信号分别计算角位移,然后根据下肢摆动频率来切换所要采用的计算结果。然而这个切换频率定为多少是合适的,又是一个比较难以确定的问题。文献[17]中给出了另一种计算关节角的方法,但是该方法采用了3种传感器(陀螺仪、加速度计和磁力计),并且同样仅适用于人体静态模式下的检测评估,没有考虑人体运动时线性加速度的存在。
本文提出一种适合单片机运算的简单算法,仅采用受验者身上的加速度计所测数据对下肢定位和其他步态参数进行测量计算。提出的双传感器差分算法能够计算局部坐标系内下肢肢段双向旋转状况,从而实现受验者行走时大腿肢段前屈/后伸和外展/内收角度的计算,因为本文方法不需要使用陀螺仪测量数据,所以不会出现前述方法中提到的用陀螺仪测量数据计算角度时的积分误差。
此外,当传感器固定在下肢上的时候,由于冲击载荷和肌肉活动,所测信号极易受皮肤运动的影响。因此,采用加速度计所测数据进行下肢肢段定位的运算评估时,需做如下假设:认为下肢段是刚体,并且受验者沿直线向前行走,躯干摆动很小,测量所受皮肤运动的干扰很小,并且腿部没有明显的内外扭转。基于此条件,当两个加速度计同轴同向地安装在肢段两个不同位置时,除了旋转加速度之外,重力加速度、平移加速度、皮肤运动影响和其他干扰对于两个传感器的作用应该是一样的。为了利用两个旋转加速度之间的差异达到测量下肢肢段在空间运动定位的目的,下面给出一种新型的基于双传感器测量信号差异的差分算法,来评估下肢段在两个方向上的转动情况。为了验证这个方法,在实验部分开发了一套基于三轴加速度计的可穿戴传感系统,并在机械臂和人体肢段上进行了测试和验证。
应用加速度计测量信号时,所得信号为合加速度,其中的平移加速度分量、重力加速度分量以及误差信号等并不能单独分离出来[ 18]。当不考虑误差与干扰时,一个三轴加速度计安装在刚体局部坐标系内的已知位置 r上,所测加速度 a如下所示:

式中: R是刚体对地姿态矩阵; a0是刚体局部坐标系原点对地加速度; g=(0,0, -g)T是重力场; ω是刚体在局部坐标系内的角速度。
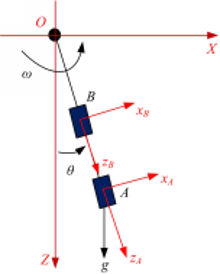
为了分析平面内刚体的旋转,引入3个参考坐标系:在刚体旋转点定义一个固定的全局坐标系 XOZ,另外两个局部坐标系 XAOAZA和 XBOBZB分别定义在两个传感器所固定的 A和 B位置, ZA和 ZB轴沿刚体长度方向,如图1所示。则 A和 B处的加速度和角位移关系通过下列表达式得出:
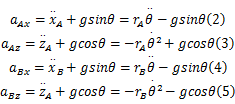
式中:( aAx, aAz)和( aBx, aBz)是局部坐标系 XAOAZA和 XBOBZB内各传感器相应轴向的加速度;( xA, zA)和( xB, zB)是 A、 B点在全局坐标系内的坐标; θ是刚体在全局坐标系 XOZ中的转角位移。
 | 图1 平面坐标系内刚体的运动示意图Fig.1 Motion of a rigid body in 2D coordinate frame |
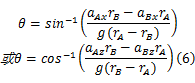
根据式(2)· rB-式(4)· rA和式(3)· rB-式(5)· rA,得出角位移计算式如下:
根据式(2)~(4)和式(3)~(5),刚体的角速度和角加速度计算式如下:
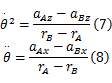
式中:旋转点到 A、 B点的距离 rA、 rB可直接用尺测出; aAx、 aBx、 aAz、 aBz可通过加速度计测出。
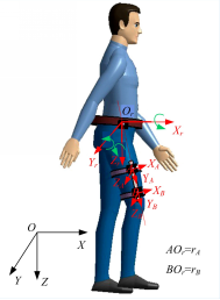
为了确定局部坐标系中人体肢段的定位角度,以分析三维空间中大腿与骨盆的相对姿态为例,测量右侧大腿的旋转角度,并作以下设定:认为髋关节为理想球套关节,允许大腿在3个方向的自由运动(前屈/后伸,外展/内收和大腿的向内/向外旋转)。引入图2中坐标系来表示髋关节的前屈/后伸和外展/内收:
(1) O-XYZ是全局坐标系, X轴向体前, Y轴向体右, Z轴竖直向下。
(2) Or-XrYrZr是髋关节处固定的局部坐标系,原点 Or在髋关节。当人体只向前做无转身的平移运动时,各轴在三维空间中保持与全局坐标系相应各轴平行。在求解髋关节旋转时[ 19], Yr轴描述前屈 /后伸运动, Xr轴描述外展/内收运动。
(3) A-xAyAzA和 B-xByBzB是两个加速度计传感器的局部坐标系,加速度计分别安装在大腿的 A、 B位置。 zA轴沿大腿骨径向, xA轴在股骨矢状面内与 zA轴垂直。两个坐标系 oB-xByBzB与 oA-xAyAzA中相对应的轴方向相同(同轴同向)。
受验者进行直线行走实验时,局部坐标系的原点 Or(髋关节)随身体向前只做矢状面内的平移运动,即本文只考虑髋关节的平移加速度,则大腿上 A点的实际合加速度( aA)可通过加速度计测量并且通过下式表示:

式中: 








 | 图2 加速度计在下肢的安装位置示意图Fig.2 Schematic diagram of lower limb with accelerometers |
如图2所示,两个相同的三轴加速度计以同轴同向的方式分别固定在大腿上 A、 B位置,因此,能够测量出 A和 B位置的两组加速度 aA和 aB,加速度计安装到位后,测量旋转半径( rA和 rB),于是得到下面的等式:
根据等式(6)中计算角位移的方法,局部坐标系中关于 Xr、 Yr和 Zr轴的角位移可从式(10)中计算出来。为了简化计算,如前所述,认为受验者是沿直线向前行走,不考虑躯干发生扭动和肌肉运动造成的误差,不考虑腿部向内/向外的偏转。只用角 θYr和 θXr来描述局部坐标系内大腿运动时的角度定位,得到计算式如下:

如等式(11)(12)所示,仅用加速度计所测的3个位置(髋关节和大腿上任意两点)的实际加速度( 
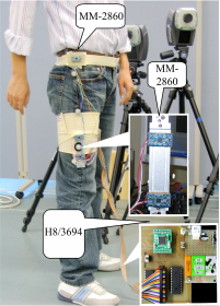
在第一个实验中,为了在简化的理想情况下检验该方法,装配了一个由刚性轴和编码器组成的二自由度机械臂,由手驱动模拟下肢摆动。如图3所示,在机械装置的两个旋转轴 Xr和 Yr处分别安装编码器(RS-32-0/1000ER.11KB),用来测量机械臂关于 Xr和 Yr轴的转角。为了测量机械臂的加速度,按照前述方法,机械臂的相应位置固定了两个同轴同向的三轴加速度计。
在第二个实验中,基于前述的理论方法,初步制作了一套可穿戴式传感检测系统,分别固定于髋关节处和大腿上。该系统采用了三片三轴加速度计和一片MCU,如图4所示。单片机用来实时存储与处理加速度计测量的信号,并且可在检测完毕后与PC机离线通信,把存储的测量信号传到电脑,以备后期信号处理与分析。
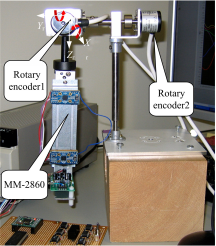 | 图3 参考机械臂系统及可穿戴传感系统Fig.3 Reference mechanical system and wearable sensor system |
 | 图4 应用所开发设备对大腿进行方向定位检测分析Fig.4 Thigh orientation analysis with developed device |
对比理论方法中的理想假设发现,在实验中还是存在一定的实际问题,即很难精确地把加速度计固定于髋关节去测量理想的髋关节处的点加速度。但是,本实验中髋关节和受验者躯干向前平移运动时的加速度是相同的,所以,可以把加速度计固定在髋关节之上的腰胯部位所测的加速度信号作为理论方法中的髋关节加速度。本实验中,第一个加速度计固定于髋关节之上的腰部,可以获得更稳定的加速度。但是应该注意的是:加速度计在腰胯部应尽量保持竖直,才能最大程度地保证所测加速度与理论方法中描述的理想平移加速度一致,也才能保证重力加速度最大程度上在加速度计的 Z轴上测得。因此,安放在腰胯部的这个加速度计首先被固定在了一块平面铝板上,然后再通过松紧带固定在腰胯部。在初始校准时,应将带有加速度计的铝板最大程度地调整到竖直方向,即与大腿的矢径面一致,并且保持加速度计的 Z轴竖直向下。
为采集大腿上两点的加速度,两片加速度计被同轴同向地固定于一片L形不反光的铝板上,并在L形铝板的端点和拐角处固定3个反光球,作为摄像拍摄参考点。在每位受验者使用穿戴式传感系统进行测试的初始安装中,应校准两个加速度计在大腿肢段的方向与髋关节和膝关节的连线保持一致。
本文实验中,8位受验者(6男2女,年龄为(25±3)岁,身高为(170±5) cm,体重为(60±11) kg无肌肉骨骼损伤等病史,要求他们在自选的慢速、正常和快速下沿直线行走测试。每次运动测试中,可通过穿戴传感系统获得三组加速度信号。同时,应用实验室光学运动分析系统(NAC Hi-Dcam II高速数码摄像系统)测量反光球的三维轨迹,分析得出受验者下肢运动参数,作为本传感器检测方法的标准参考值。
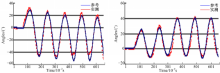
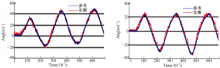
实验所测信号由MCU存储后,离线传到计算机后经Matlab分析处理。图5和图6分别给出了在高角速度(85°/s)和低角速度(55°/s)模式下,从传感系统和编码器中得到的关于 Xr和 Yr轴的实测角位移和参考角位移。图7和图8中分别给出了在受验者自选慢速和快速行走时,基于实测信号的关于 Xr和 Yr轴的大腿运动转角曲线。
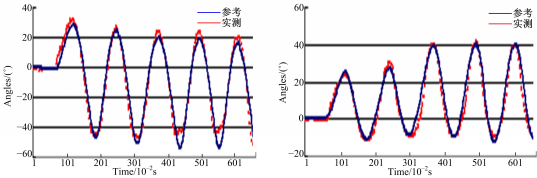 | 图5 当机械臂高速摇摆时关于 Xr和 Yr轴的计算角速度和参考角速度Fig.5 Calculated and referenced angular displacements about Xr and Yr axes when mechanical arm swung at a higher speed |
 | 图6 当机械臂低速摇摆时关于 Xr和 Yr轴的计算角速度和参考角速度Fig.6 Calculated and referenced angular displacements about the Xr and Yr axes when mechanical arm swung at a lower speed |
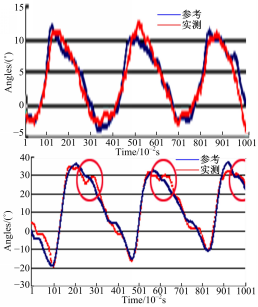 | 图7 在自选慢速情况下关于 Xr和 Yr轴的计算角位移和参考角位移Fig.7 Calculated and referenced angular displacements about Xr and Yr axes at self-selected slow speed |
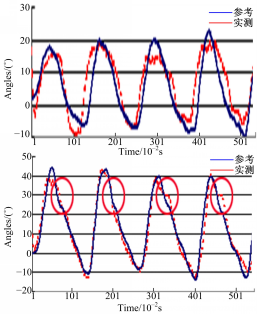 | 图8 在自选快速情况下关于 Xr和 Yr轴的计算角位移和参考角位移Fig.8 Calculated and referenced angular displacements about the Xr and Yr axes at self-selected high speed |
在不同实验情况下,关于 Xr轴和 Yr轴的参考角位移和实测角位移之间的分析数据已列在表1~表4中,其中RMSE为均方根误差, R是相关系数, rA和 rB是每个三轴加速度计的旋转半径, emax是最大误差,ROM是在各方向上被测物体的转动范围。如表1和表2所示,当 rA和 rB的值相同但是机械臂的转速不同时,转速越高导致 emax和RMSE越大,相关系数 R越小。当转速相同但 rA和 rB不同时, rA和 rB之间的差值越大,导致 emax和RMSE越小,相关系数 R越大。这表明计算得到的角位移精度与加速度计之间的距离和机械臂的转速有关。因此,为了获得更精确的角位移和转速,可增加两片加速度计之间的距离并且减小机械臂转速。
| 表1 基于机械臂系统编码器和传感检测系统轴加速度计检测结果的关于 Xr轴角位移的对比 Table 1 Result comparison of angular displacement about Xr axis between referenced mechanical system and two triaxial accelerometers based measuring system |
| 表2 基于机械臂系统编码器和传感检测系统轴加速度计检测结果的关于 Yr轴角位移的对比 Table 2 Result comparison of angular displacement around Yraxis between the referenced mechanical system and two triaxial accelerometers based measuring system |
当在大腿上应用所开发的可穿戴传感检测系统测试时,从髋关节到大腿上第一个加速度计的距离 rA取决于在每次测试时它被固定的位置,范围是(200±50) mm。
如表3和表4所示,在大腿上检测并计算得到的角位移的 emax和RMSE比在机械臂上检测计算所得到的数值大得多,这是因为相对于机械臂而言,很难把可穿戴传感系统稳定地固定在大腿上。尤其是在快速步行时,由于肌肉运动引起的冲击载荷会导致传感器在肢体表面的不稳定,为所测加速度增加了干扰误差。此外,髋关节处的加速度计也不能像理论设计中那样被精确地固定在髋关节中。随着步行速度的增加,局部坐标原点的非平移加速度也会增大,这将导致更大的误差,尤其是当腰胯部的加速度计不是完全竖直时,重力加速度将会在各轴上都产生分量,这也会导致计算误差。因此,为了得到髋关节更精确的平移加速度,应该改进加速度计在腰胯部的固定方法。此外,从对比结果看,第一个实验中的机械臂是二自由度的刚性臂,驱动它摆动时完全没有 Z轴方向的转动,这也使得由等式(11)和(12)在不考虑 Z轴转动下求解二自由度旋转肢段定位更加精确。当计算大腿的方向角时,忽略了躯干摆动,尽管受验者已经尽量保持正向前行,但因个人行走时而实际存在的躯干摆动也必然会存在并引起误差。
| 表3 在不同步态速度条件(平均值±SD)下,摄像机参考系统和可穿戴传感检测系统关于 Xr轴角位移的对比 Table 3 Result comparison of angular displacements around Xr axis(yaw angle)between referenced camera system and developed wearable sensor system under gait velocity conditions(mean±SD) |
| 表4 在不同步态速度条件(平均值±SD)下,摄像机参考系统和可穿戴传感检测系统关于 Yr轴角位移的对比 Table 4 Result comparison of angular displacements around Yr axis(pitch angle)between referenced camera system and developed wearable sensor system under gait velocity conditions(mean±SD) |
当受验者执行3种不同速度的行走实验时,在每次步态的摆动阶段后期,大腿开始主动减速,并且大腿的倾斜和偏移角位移逐渐达到最大值[ 20]。当身体继续向前移动时,髋关节也随之向前移动。在脚触地之前,大腿的角位移逐渐减小。当脚触地时,身体重量转移到该侧肢体上,于是脚与地面的反作用力立即增加,随后在径向方向上的加速度急剧上升。因此,由传感器得到的实测结果与由摄像系统得到的参考数据之间的最大误差发生在整个步态的这一阶段,如图7和图8中圆圈内部分所示。
本文给出的创新型双传感器差分算法是积分算法的一种改进,本文实验虽是在理想假设情况下进行的,但是从量化的实验结果来看,充分验证了本文方法的可行性与正确性,并得出定性的结论:本文方法可以应用于开发可穿戴传感器系统。但值得提出的是,如果想进一步把该方法应用于开发满足临床应用精度的可穿戴式传感系统,还需要进一步改善测量方法,提高测量精度。实验结果表明,重力场下的三维空间中,在肢段局部坐标系内,基于双传感器差分算法在两个轴向上对身体肢段定位进行动态测量分析是可行的。这也表明,仅使用加速计一种传感器,应用无积分误差的简单算法就可实现对人体肢段定位评估。本文方法和所开发的实际设备,可以运用于步态分析,再进一步加以改进,可为研究人员或者临床医生提供准确的肢体运动分析信息。
| [1] |
|
| [2] |
|
| [3] |
|
| [4] |
|
| [5] |
|
| [6] |
|
| [7] |
|
| [8] |
|
| [9] |
|
| [10] |
|
| [11] |
|
| [12] |
|
| [13] |
|
| [14] |
|
| [15] |
|
| [16] |
|
| [17] |
|
| [18] |
|
| [19] |
|
| [20] |
|