吉林大学学报(工学版) ›› 2018, Vol. 48 ›› Issue (6): 1827-1837.doi: 10.13229/j.cnki.jdxbgxb20170704
多异构无人机任务规划的分布式一体化求解方法
吴蔚楠1( ),崔乃刚1,郭继峰1,赵杨杨2
),崔乃刚1,郭继峰1,赵杨杨2
- 1. 哈尔滨工业大学 航天学院,哈尔滨 150001
2. 中国兵器工业集团国营第624厂,哈尔滨 150001
Distributed integrated method for mission planning of heterogeneous unmanned aerial vehicles
WU Wei-nan1(),CUI Nai-gang1,GUO Ji-feng1,ZHAO Yang-yang2
- 1. Department of Aerospace Engineering, Harbin Institute of Technology, Harbin 150001,China
2. No.624, China North Industries Group, Harbin 150001,China
摘要:
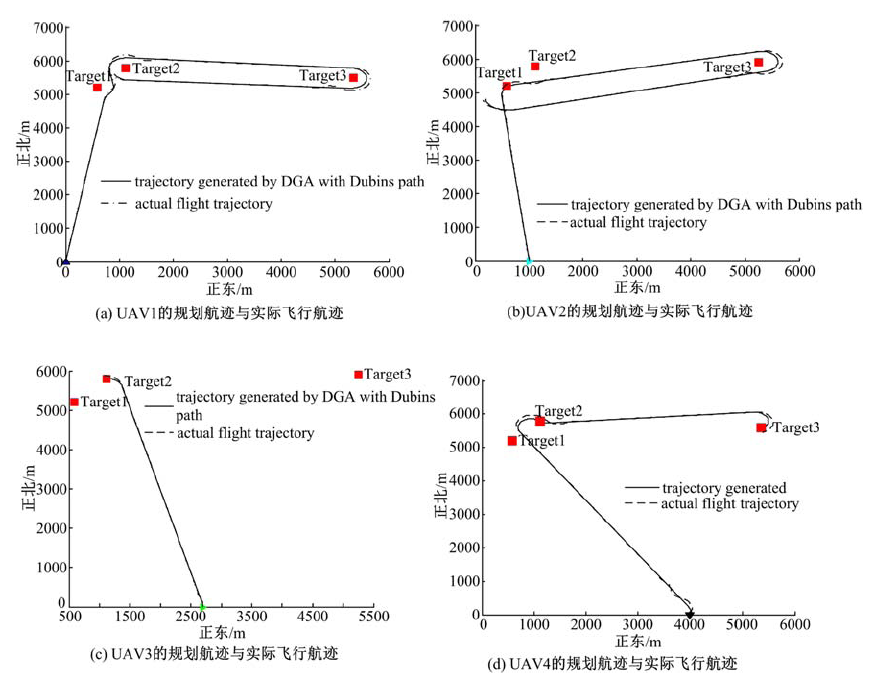
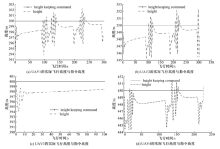
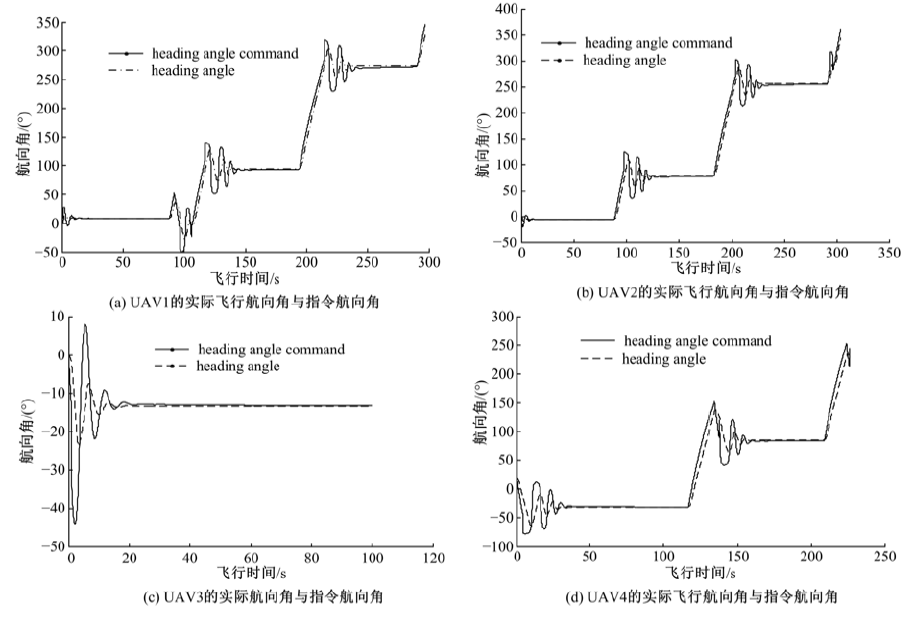
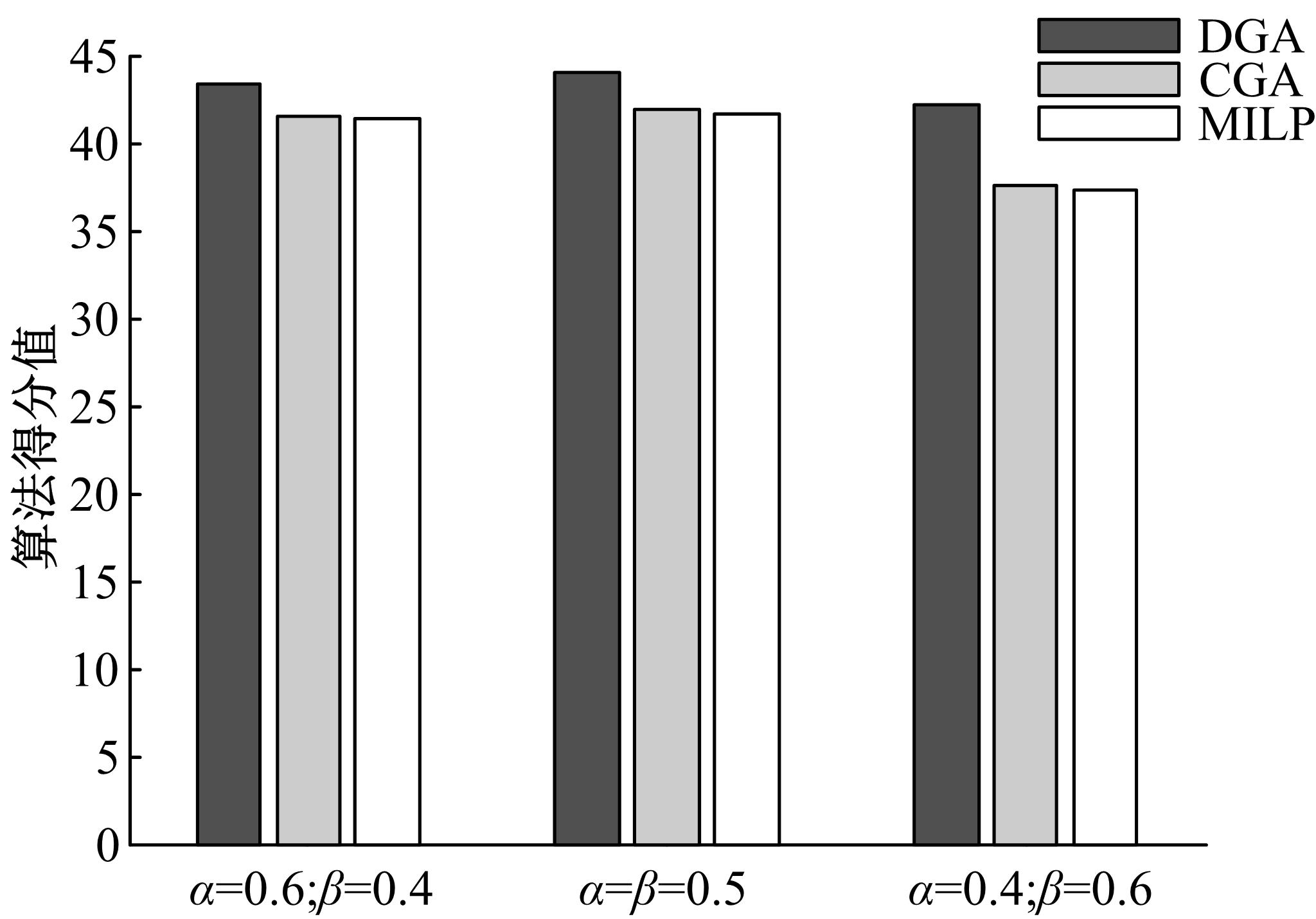
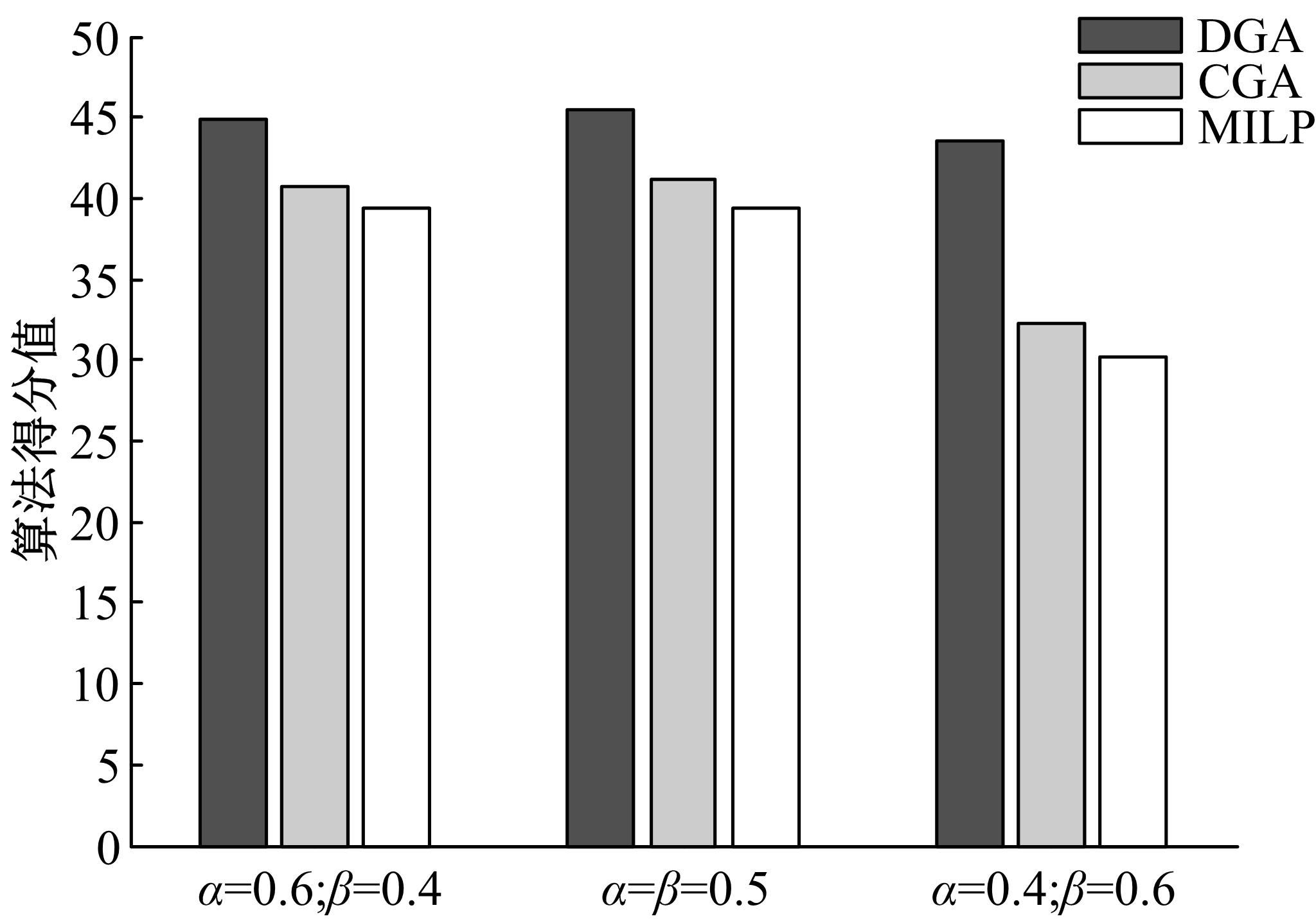
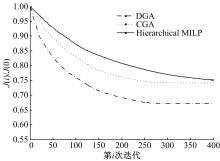
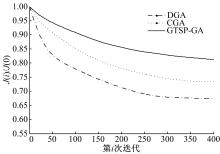
针对多异构固定翼无人机对已知目标群执行侦查、打击、评估任务的规划问题,提出了一种分布式一体化求解方法,该方法将任务执行耗时约束和协同攻击约束加入到协同任务规划模型(CMTAP)中,基于分布式规划架构,通过改进遗传算法的基因编码方式和相关遗传算子,完成任务分配和航迹生成两个子问题的一体化求解。将任务完成的总时间指标加入到代价函数中,保证了各无人机规划航迹的均匀性。建立固定翼无人机六自由度模型,采用矢量场航迹跟踪算法验证了该方法的可用性,并通过蒙特卡洛数学仿真,验证了该方法的快速性。
中图分类号:
- TP29




| [1] | Sujit P B, Kingston D, Beard R. Cooperative forest fire monitoring using multiple UAVs [C]//IEEE Conference on Decision and Control, New Orleans, Louisiana,USA, 2007: 4875-4880. |
| [2] |
Rathinam S, Sengupta R, Darbha S . A resource allocation algorithm for multivehicle systems with nonholonomic constraints[J]. IEEE Trans Autom Sci Eng, 2007,4(1):98-104.
doi: 10.1109/TASE.2006.872110 |
| [3] | Ponda S S, Johnson L B, Geramifard A , et al. Cooperative Mission Planning for Multi-UAV Teams[M]. Netherlands:Springer, 2015: 1447-1490. |
| [4] |
沈林成, 陈璟, 王楠 . 飞行器任务规划技术综述[J]. 航空学报, 2014,35(3):593-606.
doi: 10.7527/S1000-6893.2013.0500 |
|
Shen Lin-cheng, Chen Jing, Wang Nan . A survey on task planing technology for aircraft[J]. Acta Aeronautica et Astronautica Sinica, 2014,35(3):593-606.
doi: 10.7527/S1000-6893.2013.0500 |
|
| [5] | Chandler P R, Pachter M, Swaroop D, et al. Complexity in UAV cooperative control [C]//American Control Conference, IEEE, Anchorage,Alaska,USA, 2002: 1831-1836. |
| [6] | Woosley B, Dasgupta P. Multi-robot task allocation with real-time path planning [C]//Proceedings of the Twenty-Sixth International Florida Artificial Intelligence Research Society Conference (FLAIRS-26 Conference), St. Pete Beach, FL, USA, 2013: 574579. |
| [7] |
Arsie A, Savla K, Frazzoli E . Efficient routing algorithms for multiple vehicles with no explicit communications[J]. IEEE Transactions on Automatic Control, 2009,54(10):2302-2317.
doi: 10.1109/TAC.2009.2028954 |
| [8] |
Moon S, Oh E, Shim D H . An integral framework of task assignment and path planning for multiple unmanned aerial vehicles in dynamic environments[J]. Journal of Intelligent & Robotic Systems, 2013,70(1-4):303-313.
doi: 10.1007/s10846-012-9740-3 |
| [9] |
Rasmussen S J, Shima T . Tree search algorithm for assigning cooperating UAVs to multiple tasks[J]. International Journal of Robust and Nonlinear Control, 2008,18(2):135-153.
doi: 10.1002/rnc.1257 |
| [10] |
Shima T, Rasmussen S J, Sparks A G , et al. Multiple task assignments for cooperating uninhabited aerial vehicles using genetic algorithms[J]. Computers & Operations Research, 2006,33(11):3252-3269.
doi: 10.1016/j.cor.2005.02.039 |
| [11] |
Edison E, Shima T . Integrated task assignment and path optimization for cooperating uninhabited aerial vehicles using genetic algorithms[J]. Computers & Operations Research, 2011,38(1):340-356.
doi: 10.1016/j.cor.2010.06.001 |
| [12] |
Deng Q, Yu J, Wang N . Cooperative task assignment of multiple heterogeneous unmanned aerial vehicles using a modified genetic algorithm with multi-type genes[J]. Chinese Journal of Aeronautics, 2013,26(5):1238-1250.
doi: 10.1016/j.cja.2013.07.009 |
| [13] |
Zhang X, Chen J, Xin B , et al. A memetic algorithm for path planning of curvature-constrained UAVs per-forming surveillance of multiple ground targets[J]. Chinese Journal of Aeronautics, 2014,27(3):622-633.
doi: 10.1016/j.cja.2014.04.024 |
| [14] | Michalewicz Z, Fogel D B . How to Solve It: Modern Heuristics[M]. Berlin:Berlin Springer Science & Business Media, 2013. |
| [15] | Schaefer R. Foundations of Global Genetic Optimization[M]. Berlin: Springer Publishing Company, Incorporated, 2007. |
| [16] | 楚拉多斯·怀特·尚穆加韦尔 . 无人机协同路径规划[M]. 北京: 国防工业出版社, 2011. |
| [17] |
Dubins L E . On curves of minimal length with a constraint on average curvature, and with prescribed initial and terminal positions and tangents[J]. American Journal of Mathematics, 1957,79(3):497-516.
doi: 10.2307/2372560 |
| [18] |
Yoav Gottlieb, Tal Shima . UAVs task and motion planning in the presence of obstacles and prioritized targets[J]. Sensors, 2015,15:29734-29764.
doi: 10.3390/s151129734 pmid: 4701357 |
| [19] | Beard R W, McLain T W . Small Unmanned Aircraft: Theory and Practice[M]. New Jersey: Princeton University Press, 2012. |
| [20] | Nelson D, Barber B, McLain T, et al. Vector field path following for small unmanned aerial vehicles [C]//Proceedings of the American Control Conference, Minneapolis, Minnesota, 2006: 5788-5794. |
| [21] | Interval Zero. RTX development guide[EB/OL].[2017-04-30].. |
| [1] | 刘淑华,张嵛,吴洪岩,刘杰. 基于群体智能的多机器人任务分配[J]. 吉林大学学报(工学版), 2010, 40(01): 123-0129. |
| [2] | 王峰, 曹喜滨, 耿云海. 椭圆轨道上在轨服务航天器绕飞轨道设计及控制[J]. 吉林大学学报(工学版), 2006, 36(03): 410-0416. |
|