吉林大学学报(工学版) ›› 2021, Vol. 51 ›› Issue (5): 1593-1600.doi: 10.13229/j.cnki.jdxbgxb20200558
• 车辆工程·机械工程 • 上一篇
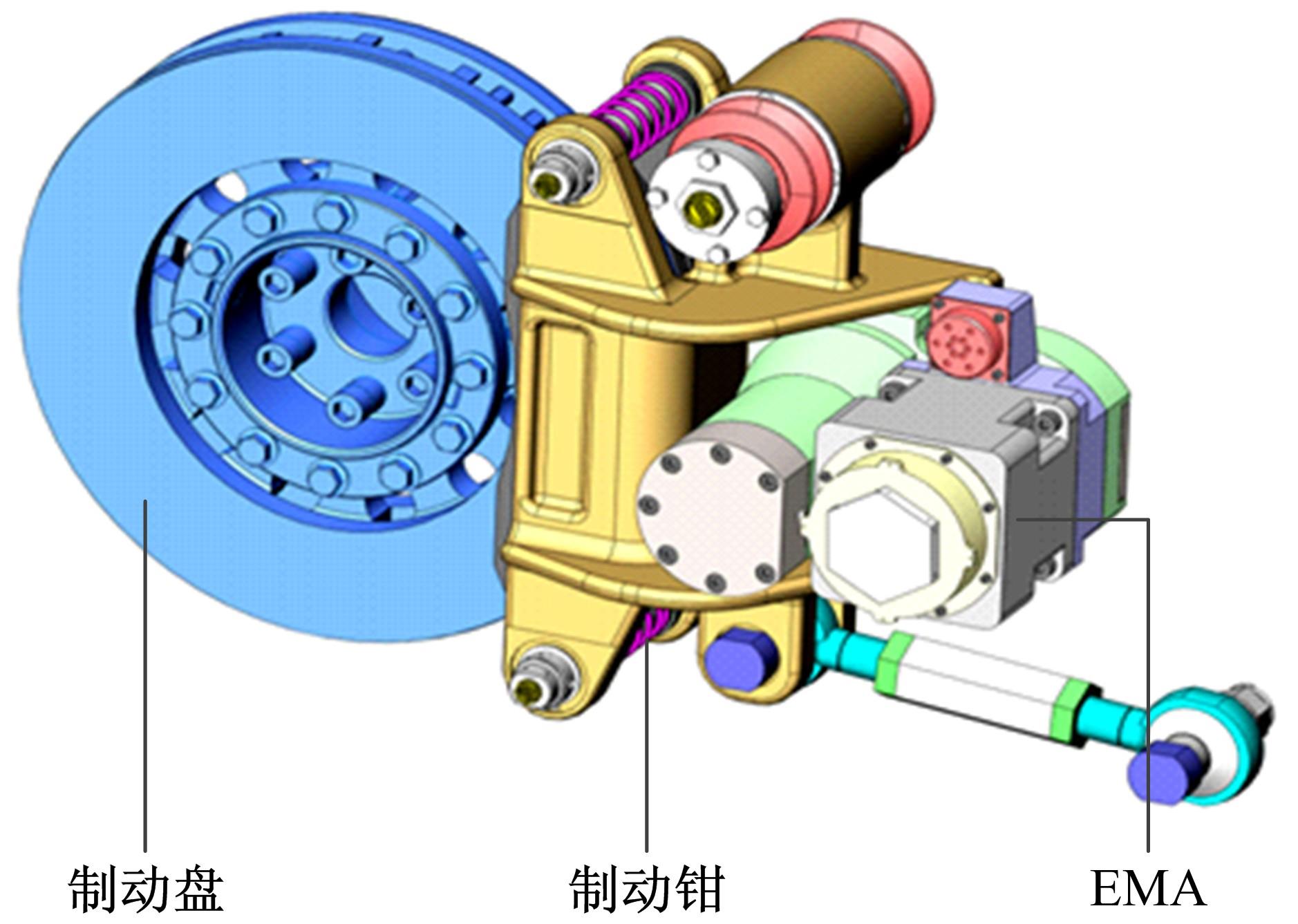
城轨列车电子机械制动系统的非线性PI控制
赵逸云1( ),林辉1,李兵强1,苗峰2
),林辉1,李兵强1,苗峰2
- 1.西北工业大学 自动化学院,西安 710129
2.中车青岛四方车辆研究所有限公司,山东 青岛 266031
Electromechanical brake system based on the nonlinear PI controller of urban rail trains
Yi-yun ZHAO1(),Hui LIN1,Bing-qiang LI1,Feng MIAO2
- 1.College of Automation,Northwestern Polytechnical University,Xi'an 710129,China
2.CRRC Qingdao Sifang Rolling Stock Research Institute Co. ,Ltd. ,Qingdao 266031,China
摘要:
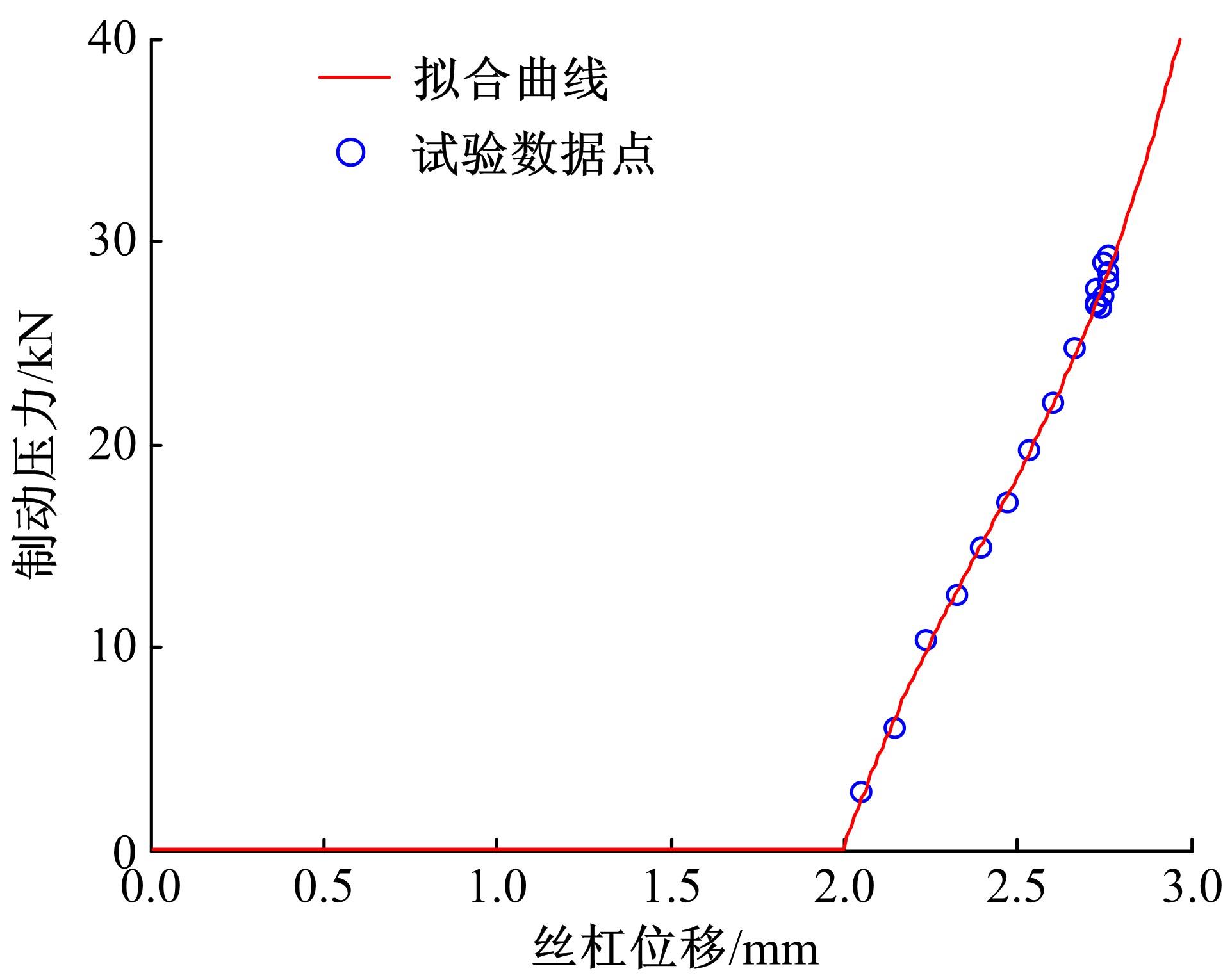
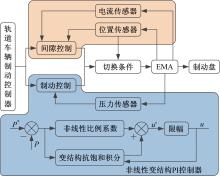
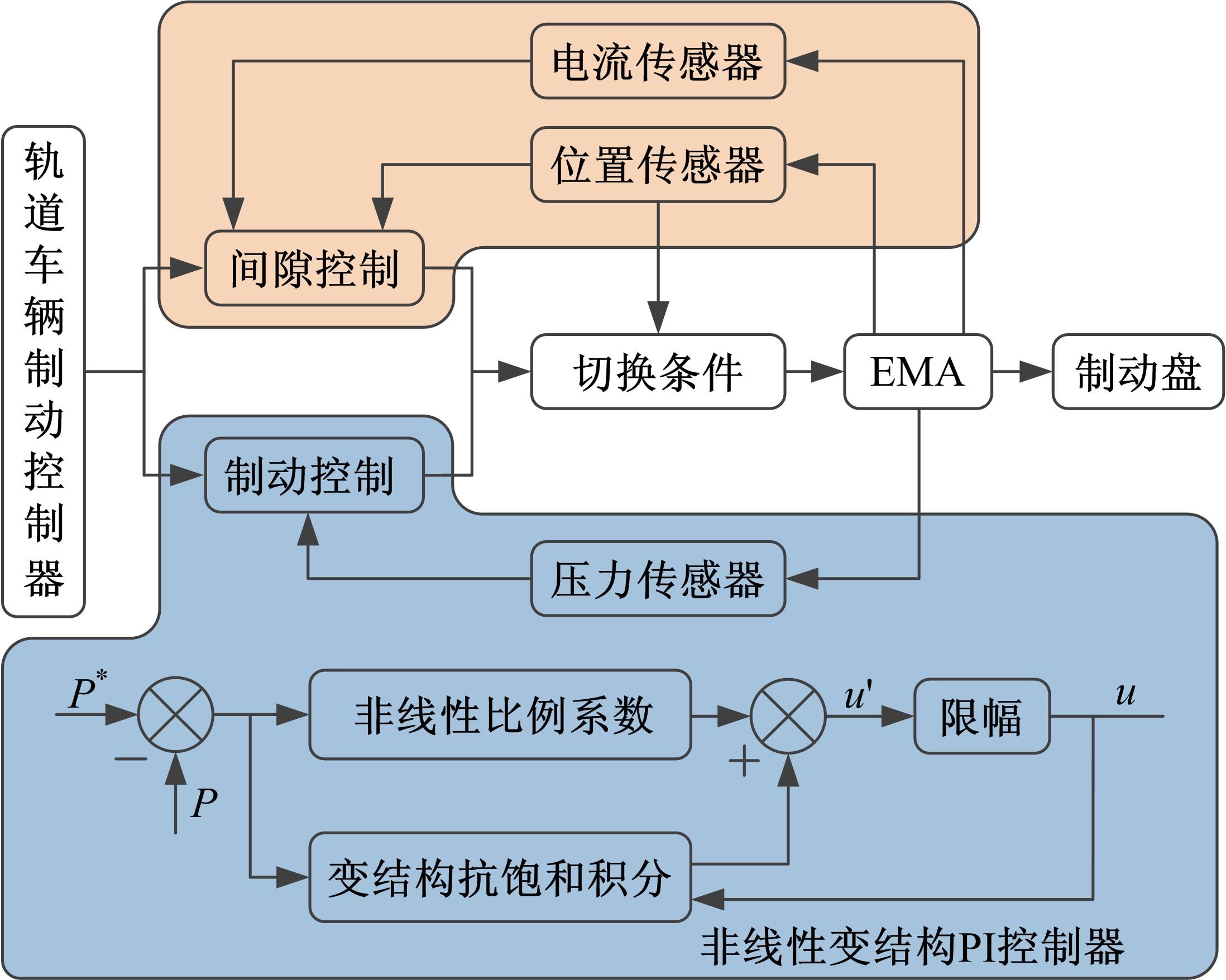
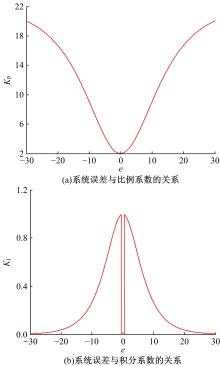
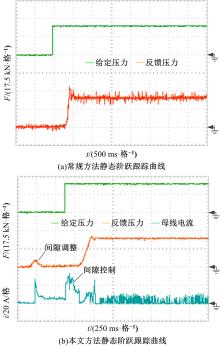
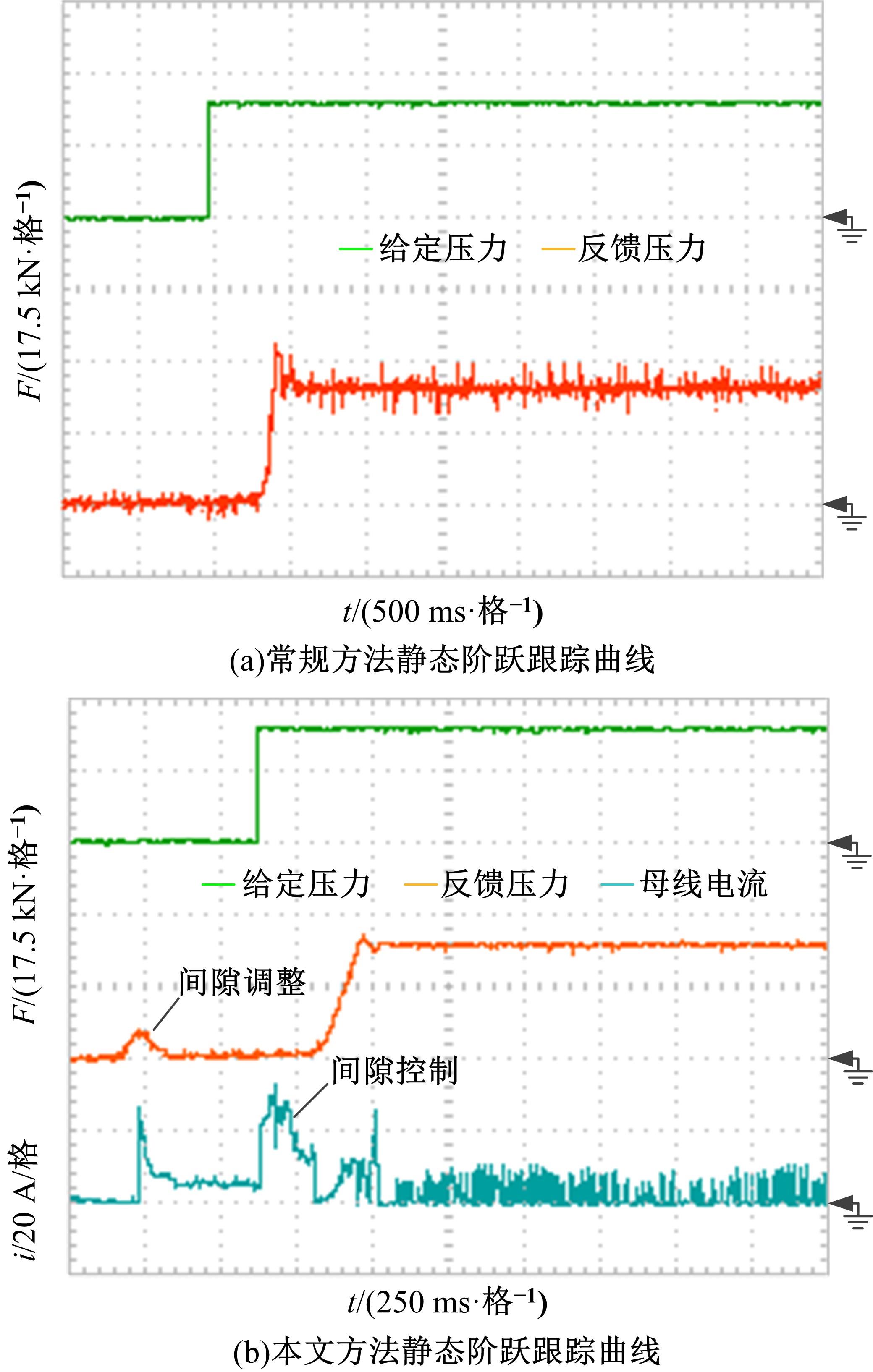
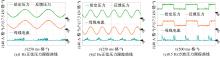
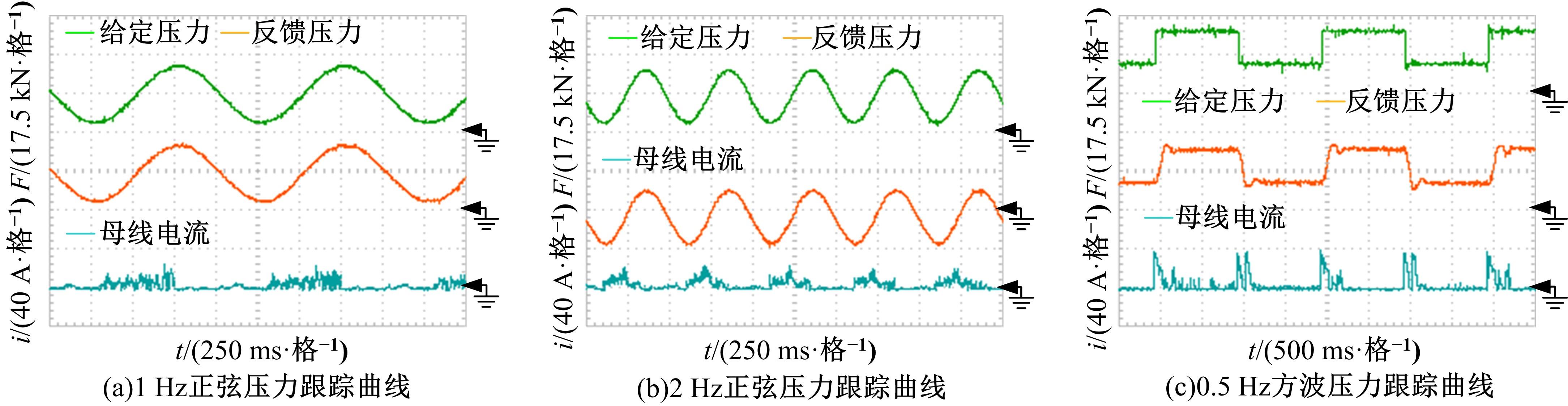
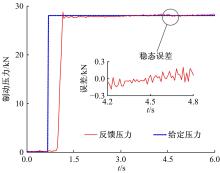
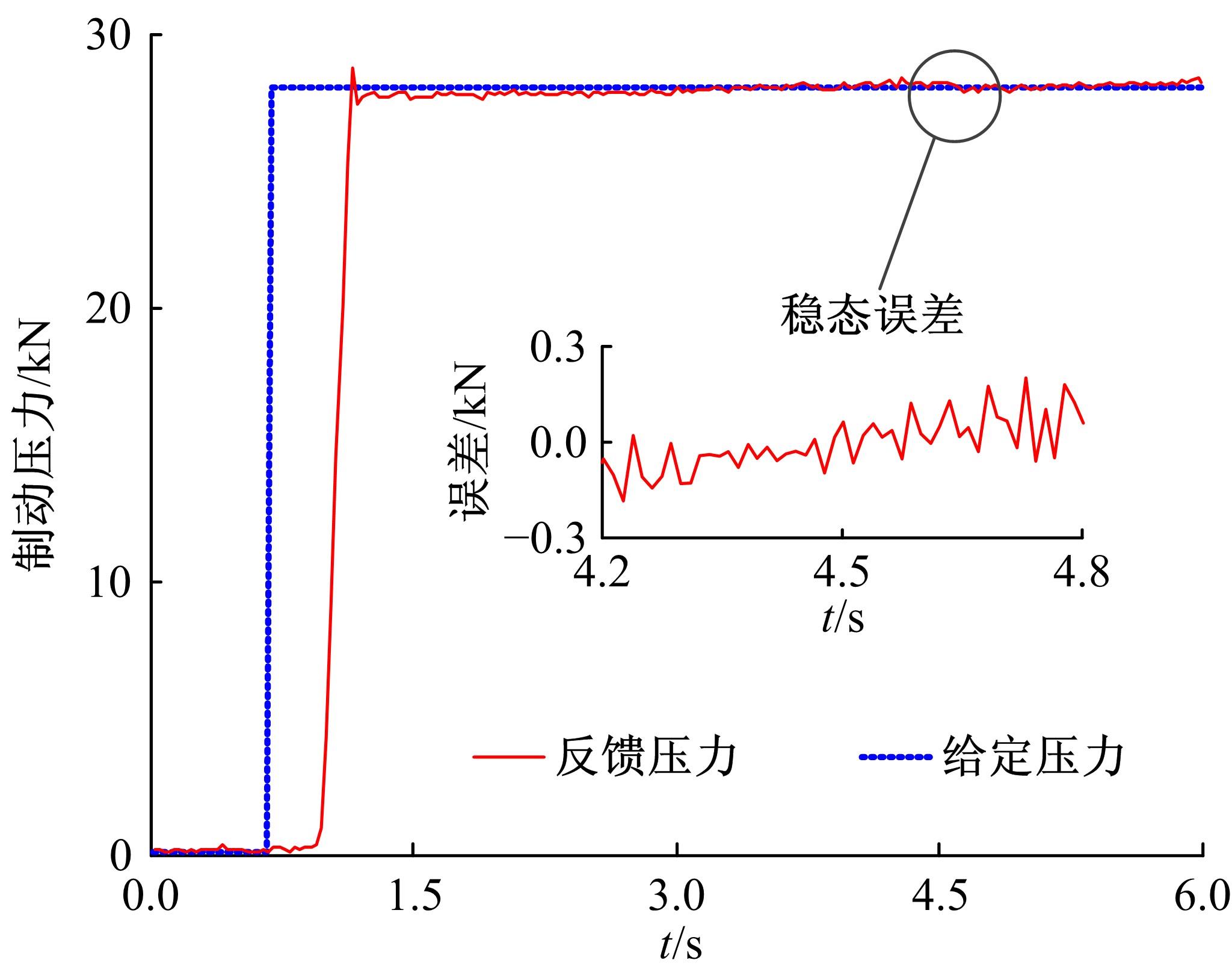
设计了一种适用于城轨列车的电子机械制动系统,推导其数学模型,以常规小区段设定预置PI控制算法为基础,提出了一种双曲正割非线性PI控制算法,以提高系统的鲁棒性与适应性。此外,通过改进型变结构抗积分饱和算法,减小了系统稳态误差。静态试验结果验证了本文控制算法的有效性。最后,由等比例惯性台制动试验验证了电子机械制动系统在轨道交通领域应用的可行性,为电子机械制动系统在轨道交通领域的应用提供了理论基础。
中图分类号:
- TM921.5








| 1 | 吴萌岭, 马天和, 田春, 等. 列车制动技术发展趋势探讨[J]. 中国铁道科学, 2019, 40(1): 134-144. |
| Wu Meng-ling, Ma Tian-he, Tian Chun, et al. Discussion on development trend of train braking technology[J]. China Railway Science, 2019, 40(1): 134-144. | |
| 2 | 李兵强, 陈晓雷, 林辉, 等. 飞机全电防滑刹车系统稳定动态面控制[J]. 系统工程与电子技术, 2016, 38(5): 1139-1145. |
| Li Bing-qiang, Chen Xiao-lei, Lin Hui, et al. Enhanced stability dynamic surface control for aircraft anti-skid braking system using electromechanical actuator[J]. Systems Engineering and Electronics, 2016, 38(5): 1139-1145. | |
| 3 | 陈晓雷, 林辉, 李兵强, 等. 飞机全电刹车系统滑移率约束反演滑模控制[J]. 上海交通大学学报, 2015, 49(12): 1855-1861. |
| Chen Xiao-lei, Lin Hui, Li Bing-qiang, et al. Backstepping sliding mode control for aircraft electric braking systems with slip ratio constraint[J]. Journal of Shanghai Jiao Tong University, 2015, 49(12): 1855-1861. | |
| 4 | 夏利红, 邓兆祥. 电子机械制动执行器的整体最优匹配设计[J]. 吉林大学学报: 工学版, 2018, 48(4): 998-1007. |
| Xia Li-hong, Deng Zhao-xiang. Optimal design of electromechanical brake actuator through an integrated mechatronic approach[J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(4): 998-1007. | |
| 5 | 李静, 张建, 王梦春, 等. 电子机械制动执行器数学建模与精细控制[J]. 吉林大学学报: 工学版, 2012, 42(): 1-6. |
| Li Jing, Zhang Jian, Wang Meng-chun, et al. Electromechanical brake actuator modeling and accurate control algorithm[J]. Journal of Jilin University(Engineering and Technology Edition), 2012, 42(Sup.1): 1-6. | |
| 6 | Ren Y, Li L Y, Brindley J, et al. Nonlinear PI control for variable pitch wind turbine[J]. Control Engineering Practice, 2016, 50: 84-94. |
| 7 | Errouissi R, Al-Durra A, Muyeen S M. Design and implementation of a nonlinear PI predictive controller for a grid-tied photovoltaic inverter[J]. IEEE Transactions on Industrial Electronics, 2017, 64(2): 1241-1250. |
| 8 | 郭文杰, 林飞, 郑琼林. 三相电压型PWM整流器的级联式非线性PI控制[J]. 中国电机工程学报, 2006, 26(2): 138-142. |
| Guo Wen-jie, Lin Fei, Zheng Qiong-lin. The cascaded nonlinear PI control for three-phase votagle source PWM rectifier[J]. Proceedings of CSEE, 2006, 26(2): 138-142. | |
| 9 | 李虹, 尚佳宁, 陈姚, 等. 基于fal函数的非线性PI控制器在DC-DC变换器中的应用[J]. 电工技术学报, 2014, 29(): 326-331. |
| Li Hong, Shang Jia-ning, Chen Yao, et al. The applications of nonlinear PI controller based on the fal function in the DC-DC converter[J]. Transactions of China Electrotechinal Society, 2014, 29(Sup.1): 326-331. | |
| 10 | Honkanen J, Hannonen J, Korhonen J, et al. Nonlinear PI-control approach for improving the DC-link voltage control performance of a power-factor-corrected system[J]. IEEE Transactions on Industrial Electronics, 2019, 66(7): 5456-5464. |
| 11 | 姜向龙, 赵金, 万淑芸. 基于双曲正切函数的非线性PI控制器及其在感应电动机矢量控制中的应用[J]. 电工技术学报, 2004, 19(6): 85-89. |
| Jiang Xiang-long, Zhao Jin, Wan Shu-yun. A nonlinear PI speed controller based on hyperbolic function and its application in the vector control of an induction motor[J]. Transactions of China Electrotechnical Society, 2004, 19(6): 85-89. | |
| 12 | 牛里, 杨明, 唐思宇, 等. 基于积分状态预测的Anti-Windup PID控制器设计[J]. 电工技术学报, 2014, 29(9): 145-152. |
| Niu Li, Yang Ming, Tang Si-yu, et al. Design of Anti-Windup PID controller with integral state prediction[J]. Transactions of China Electrotechinal Society, 2014, 29(9): 145-152. | |
| 13 | 于艳君, 柴凤, 高宏伟, 等. 基于Anti-Windup控制器的永磁同步电机控制系统设计[J]. 电工技术学报, 2009, 24(4): 66-70. |
| Yu Yan-jun, Chai Feng, Gao Hong-wei, et al. Design of PMSM system based on Anti-Windup controller[J]. Transactions of China Electrotechinal Society, 2009, 24(4): 66-70. | |
| 14 | Hodel S A, Hall C E. Variable-structure PID control to prevent integrator windup[J]. IEEE Transactions on Industrial Electronics, 2002, 48(2): 442-451. |
| 15 | Peng Y B, Vrancic D, Hanus R. Anti-Windup, bumpless, and conditioned transfer techniques for PID controllers[J]. IEEE Control Systems Magazine, 1996, 16(4): 48-57. |
| 16 | Visioli A. Modified Anti-Windup scheme for PID controllers[J]. IEE Proceedings-Control Theory and Applications, 2003, 150(1): 49-54. |
| [1] | 夏利红, 邓兆祥. 电子机械制动执行器的整体最优匹配设计[J]. 吉林大学学报(工学版), 2018, 48(4): 998-1007. |
| [2] | 吴坚, 赵阳, 何睿. 基于支持向量机回归算法的电子机械制动传感器系统故障诊断[J]. 吉林大学学报(工学版), 2013, 43(05): 1178-1183. |
| [3] | 吴东岩, 刘大欣, 谢徐州, 曾志勇, 陈胜根. 大型多功能风电机组主轴制动器惯性试验台的研制[J]. 吉林大学学报(工学版), 2013, 43(04): 951-957. |
|
||