吉林大学学报(工学版) ›› 2020, Vol. 50 ›› Issue (2): 711-718.doi: 10.13229/j.cnki.jdxbgxb20181143
• 通信与控制工程 • 上一篇
基于车间通信的车辆编队控制方法设计
马彦1,2( ),黄健飞1,赵海艳1,2()
),黄健飞1,赵海艳1,2()
- 1.吉林大学 通信工程学院,长春 130022
2.吉林大学 汽车仿真与控制国家重点实验室,长春 130022
Method of vehicle formation control based on vehicle to vehicle communication
Yan MA1,2(),Jian-fei HUANG1,Hai-yan ZHAO1,2()
- 1.College of Communication Engineering,Jilin University,Changchun 130022,China
2.Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
摘要:
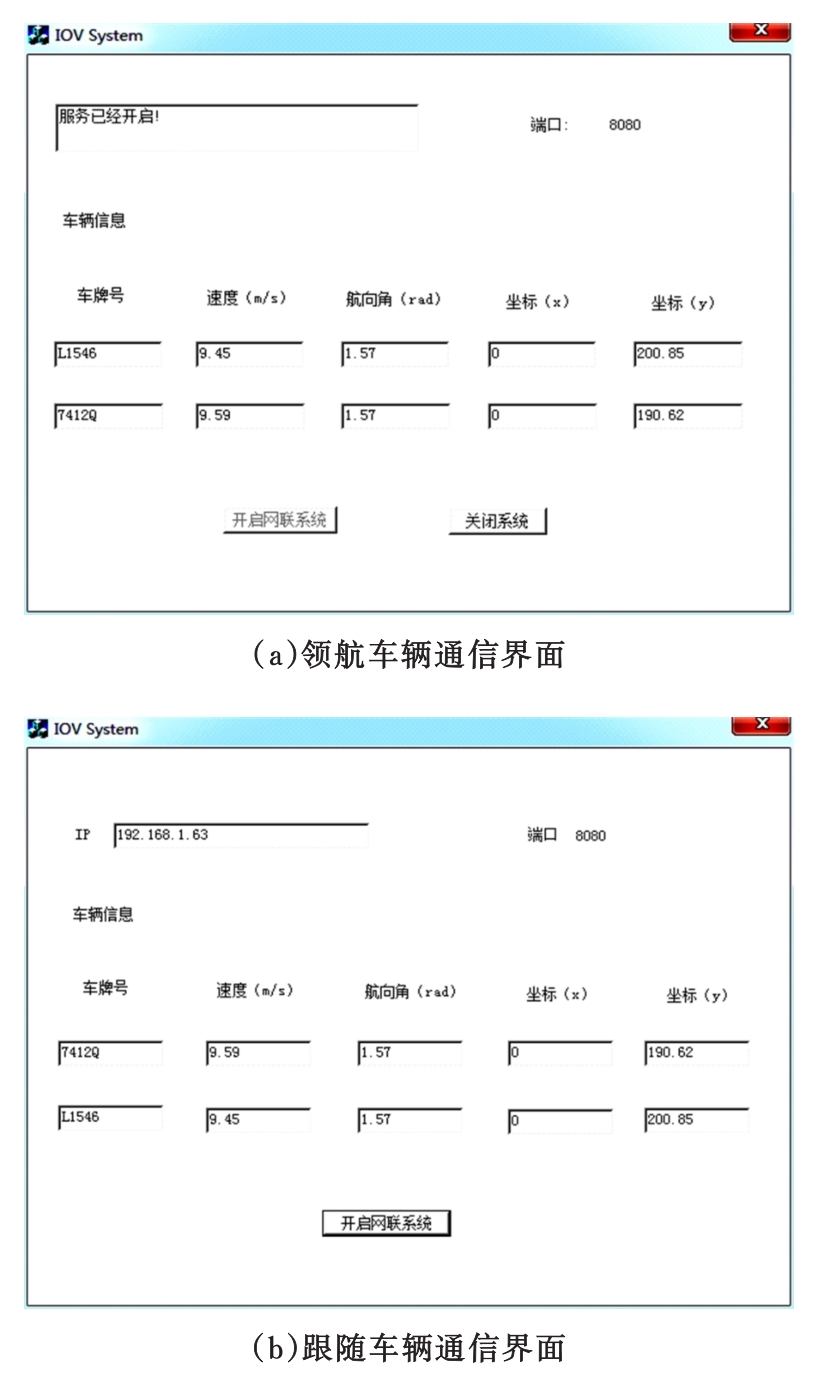
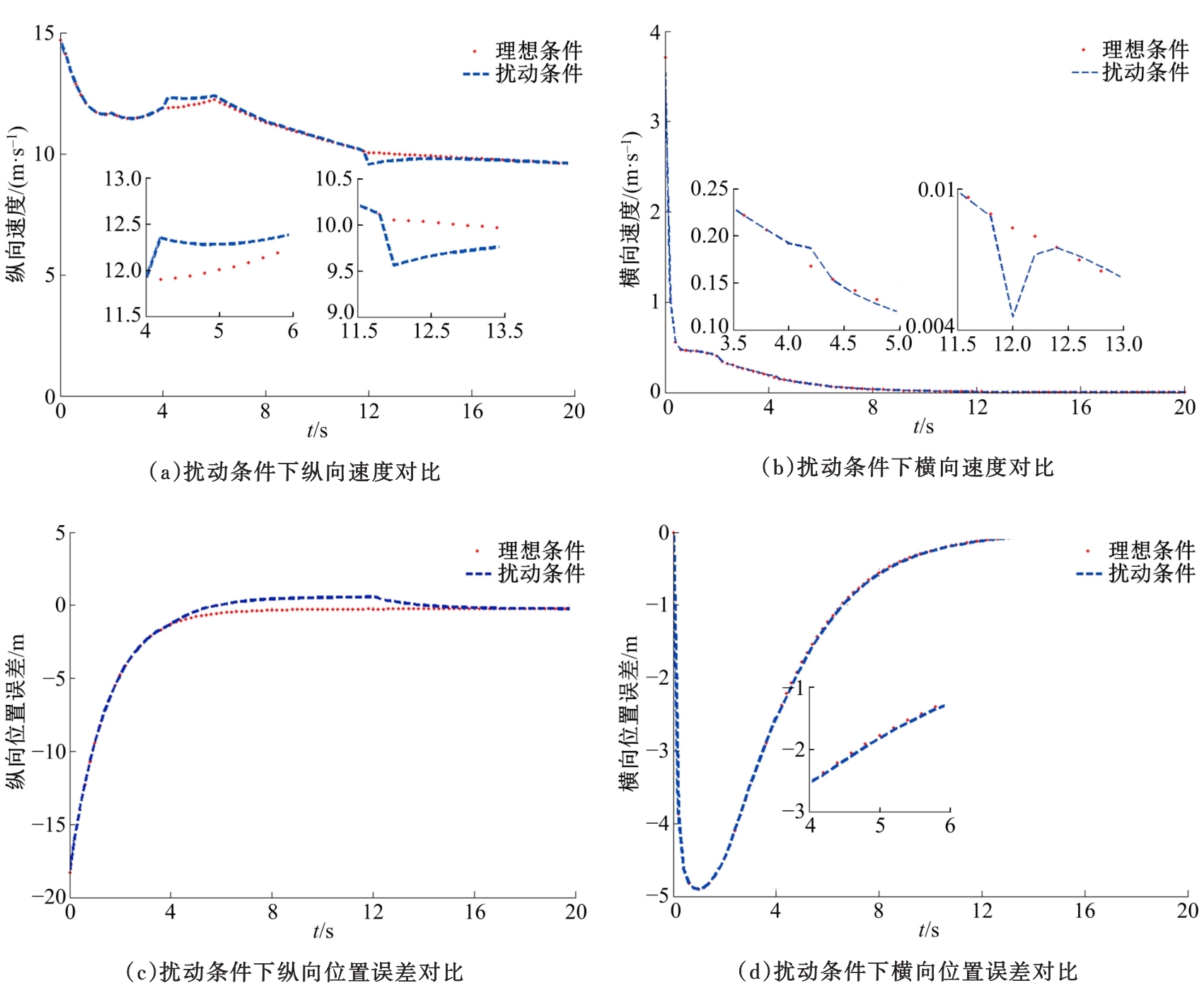
传统的跟随领航者编队控制器在实际情况中难以准确获得领航车辆运动状态,并且其内部参数可能受到外部干扰的影响而具有不确定性。对此本文设计了基于自适应控制理论中变量估计方法的反馈线性控制器,提出了基于车间通信技术的控制器改进方法。首先,通过变量估计方法提高了控制器参数中的相对距离的精确度;然后,通过车间通信技术保证了接收到的领航车辆运动信息的准确性;最后,在VS2010和Simulink环境下进行了联合仿真实验,验证了算法的有效性。结果表明:基于车间通信技术和自适应原理的跟随领航者编队控制方法能有效完成编队任务,误差较小且收敛,为智能网联汽车的发展提供了一定应用价值。
中图分类号:
- TP273






| 1 | 任开明, 李纪舟, 刘玲艳, 等. 车联网通信技术发展现状及趋势研究[J]. 通信技术, 2015, 48(5): 507-513. |
| Ren Kai-ming, Li Ji-zhou, Liu Ling-yan, et al. Development status and tendency of IoV communication technology[J]. Communication Technology, 2015, 48(5): 507-513. | |
| 2 | 刘宗巍, 匡旭, 赵福全. 中国车联网产业发展现状、瓶颈及应对策略[J]. 科技管理研究, 2016, 36(4): 121-127. |
| Liu Zong-wei, Kuang Xu, Zhao Fu-quan. The current situation, problems and countermeasures in Chinese internet of vehicles industrialization development[J]. Science and Technology Management Research, 2016, 36(4): 121-127. | |
| 3 | Zhang F, Xi J, Langari R. Real-time energy management strategy based on velocity forecasts using V2V and V2I communications[J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(2): 416-430. |
| 4 | Du L, Dao H. Information dissemination delay in vehicle-to-vehicle communication networks in a traffic stream[J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(1): 66-80. |
| 5 | Mo C, Li Y, Ling Z. Simulation and analysis on overtaking safety assistance system based on vehicle-to-vehicle communication[J]. Automotive Innovation, 2018, 1(2): 158-166. |
| 6 | Nascimento T P, Conceição A G S, Moreira A P. Multi-robot nonlinear model predictive formation control: the obstacle avoidance problem[J]. Robotica, 2016, 34(3): 549-567. |
| 7 | Xiao H, Li Z, Chen C L P. Formation control of leader-follower mobile robots’ systems using model predictive control based on neural-dynamic optimization[J]. IEEE Transactions on Industrial Electronics, 2016, 63(9): 5752-5762. |
| 8 | 庄迁政. 多智能小车编队控制及3D实时仿真[D].哈尔滨: 哈尔滨工业大学航天学院, 2014. |
| Zhuang Qian-zheng. Formation control of multi-small vehicles and 3D realtime simulation[D]. Harbin: School of Astronautics, Harbin Institute of Technology, 2014. | |
| 9 | Yang S, Cao Y, Peng Z, et al. Distributed formation control of nonholonomic autonomous vehicle via RBF neural network[J]. Mechanical Systems & Signal Processing, 2017, 87: 81-95. |
| 10 | Kachroo P, Agarwal S, Piccoli B, et al. Multi-scale modeling and control architecture for V2X enabled traffic streams[J]. IEEE Transactions on Vehicular Technology, 2017, 66(6): 4616-4626. |
| 11 | Chen S, Hu J, Yan S, et al. LTE-V: A TD-LTE-based V2X solution for future vehicular network[J]. IEEE Internet of Things Journal, 2017, 3(6): 997-1005. |
| 12 | Loria A, Dasdemir J, Jarquin N A. Leader-follower formation and tracking control of mobile robots along straight paths[J]. IEEE Transactions on Control Systems Technology, 2016, 24(2): 727-732. |
| [1] | 顾万里,王萍,胡云峰,蔡硕,陈虹. 具有H∞性能的轮式移动机器人非线性控制器设计[J]. 吉林大学学报(工学版), 2018, 48(6): 1811-1819. |
| [2] | 李志慧, 夏英集, 曲昭伟, 任景琛. 视频监控的数据驱动背景模型[J]. 吉林大学学报(工学版), 2017, 47(4): 1286-1294. |
| [3] | 邵克勇, 陈丰, 王婷婷, 王季驰, 周立朋. 无平衡点分数阶混沌系统全状态自适应控制[J]. 吉林大学学报(工学版), 2017, 47(4): 1225-1230. |
| [4] | 邓丽飞, 石要武, 朱兰香, 于丁力. SI发动机闭环系统故障检测[J]. 吉林大学学报(工学版), 2017, 47(2): 577-582. |
| [5] | 李兵强, 陈晓雷, 林辉, 吕帅帅, 马冬麒. 机电伺服系统高精度自适应反推滑模控制[J]. 吉林大学学报(工学版), 2016, 46(6): 2003-2009. |
| [6] | 曹福成, 邢笑雪, 李元春, 赵希禄. 下肢康复机器人轨迹自适应滑模阻抗控制[J]. 吉林大学学报(工学版), 2016, 46(5): 1602-1608. |
| [7] | 黄晶莹, 秦大同, 刘永刚. 基于自适应滤波的电动汽车电-液复合制动系统防抱死控制[J]. 吉林大学学报(工学版), 2016, 46(4): 1044-1051. |
| [8] | 吴爱国, 杨硕, 张涵, 李长滨. 压机的调平和跟踪控制[J]. 吉林大学学报(工学版), 2014, 44(4): 1051-1056. |
| [9] | 齐一名, 孔德刚, 臧雪柏, 赵桓衡. 基于ANFIS的磨矿过程控制算法[J]. 吉林大学学报(工学版), 2011, 41(增刊1): 231-234. |
| [10] | 罗小元, 武晓晶, 吴学礼, 关新平. 一类非线性系统基于观测器的自适应容错控制[J]. 吉林大学学报(工学版), 2011, 41(02): 491-0496. |
| [11] | 赵宏伟,齐一名,臧雪柏,张孝临,马英喆. 基于系统辨识与T-S模糊神经网络的磨矿分级控制[J]. 吉林大学学报(工学版), 2011, 41(01): 171-0175. |
| [12] | 薛力军, 胡松华, 梁斌, 李成, 强文义. 不确定性空间机器人自适应Terminal滑模控制方法[J]. 吉林大学学报(工学版), 2010, 40(03): 800-0805. |
| [13] | 王庆年,郑君峰,王伟华 . 一种新的并联混合动力客车的自适应控制策略[J]. 吉林大学学报(工学版), 2008, 38(02): 249-0253. |
| [14] | 王岩青,姜长生 . 一类非线性不确定中立型系统的鲁棒自适应滑模控制[J]. 吉林大学学报(工学版), 2007, 37(04): 935-938. |
| [15] | 张友安,, 糜玉林, 吕凤琳, 孙富春,. 双连杆柔性臂自适应模糊滑模控制[J]. 吉林大学学报(工学版), 2005, 35(05): 520-0525. |
|
||