吉林大学学报(工学版) ›› 2024, Vol. 54 ›› Issue (8): 2378-2384.doi: 10.13229/j.cnki.jdxbgxb.20230345
基于激光测距传感器的车辆轨迹全息感知方法
张辉( ),温鑫,陈海宇,黄世淳
),温鑫,陈海宇,黄世淳
- 中山大学 智能工程学院,广东 深圳 518107
Vehicle trajectory holographic perception method based on laser range sensors
Hui ZHANG(),Xin WEN,Hai-yu CHEN,Shi-chun HUANG
- School of Intelligent Systems Engineering,Sun Yat-sen University,Shenzhen 518107,China
摘要:
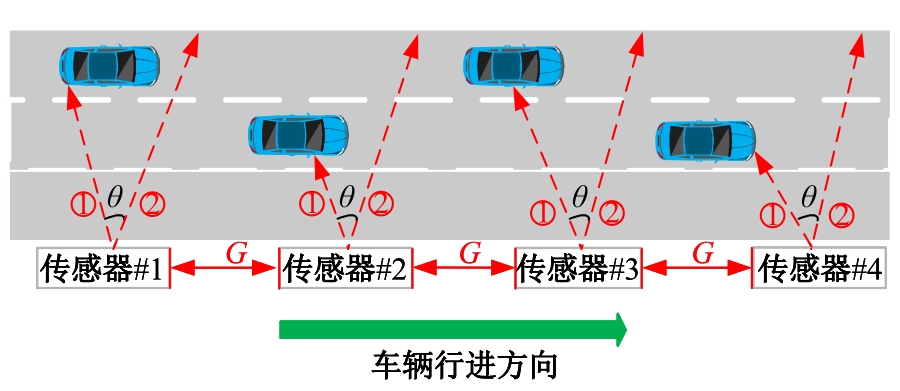
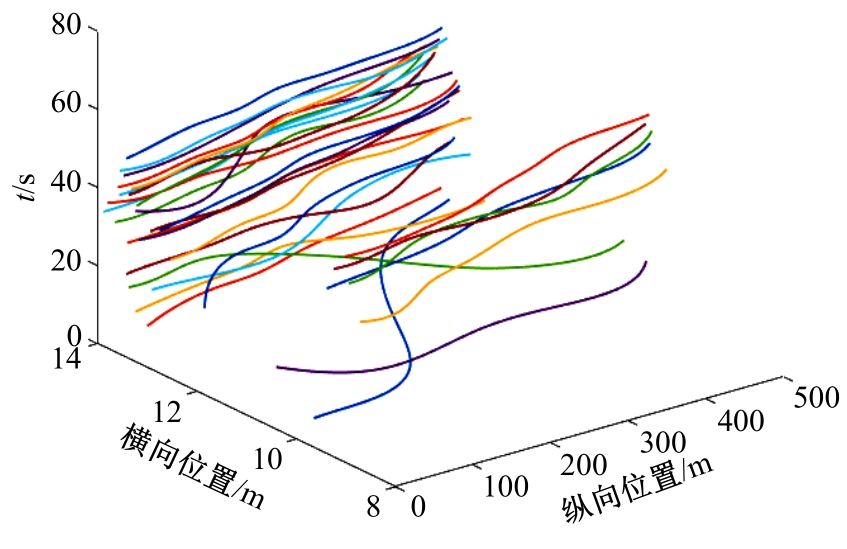
为实现高速公路全路段车辆轨迹的实时全息感知,提出一种成本效益高、易于部署的车辆轨迹全息感知方法。首先,基于路侧分布式布设的由激光测距传感器构成的感知设备,实时采集车辆的离散轨迹断面信息;之后,通过条件匹配,将相邻检测断面信息进行匹配关联,得到每一辆车的轨迹点序列;最终,利用三次样条插值方法重构车辆的完整轨迹。经验证,该方法得到的车辆重构轨迹与其真实轨迹基本吻合,可见该方法在理论上是可行的。
中图分类号:
- U417.9

| 1 | 杨洋, 贺昆, 王云鹏, 等. 面向动态交通流的高速公路事故风险模型空间移植研究[J]. 交通运输系统工程与信息, 2023, 23(3): 174-186. |
| Yang Yang, He Kun, Wang Yun-peng, et al. Spatial transplantation for modeling of freeway traffic crash risk based on dynamic traffic flow[J]. Journal of Transportation Systems Engineering and Information Technology, 2023, 23(3): 174-186. | |
| 2 | Han B, Wu Z H, Gu C Y, et al. Developing a regional drive cycle using GPS-based trajectory data from rideshare passenger cars: a case of Chengdu, China[J]. Sustainability, 2021, 13(4): 84152114. |
| 3 | 魏文辉, 赵祥模, 葛振振. 考虑动力学模型系统误差补偿的智能车GNSS/IMU组合定位算法[J]. 中国公路学报, 2022, 35(9): 185-194. |
| Wei Wen-hui, Zhao Xiang-mo, Ge Zhen-zhen. An algorithm considering kinematic model systematic error compensation for intelligent vehicle GNSS/IMU integrated positioning[J]. China Journal of Highway and Transport, 2022, 35(9): 185-194. | |
| 4 | Cao M C, Wang R R, Chen N, et al. A learning-based vehicle trajectory-tracking approach for autonomous vehicles with lidar failure under various lighting conditions[J]. IEEE/ASME Transactions on Mechatronics, 2021, 27(2): 1011-1022. |
| 5 | Ding N K, Lu Z Y, Jiao N S, et al. Quantifying effects of reverse linear perspective as a visual cue on vehicle and platoon crash risk variations in car-following using path analysis[J]. Accident Analysis & Prevention, 2021, 159: 106215. |
| 6 | 王俊骅,宋昊,景强,等.基于毫米波雷达组群的全域车辆轨迹检测技术方法[J].中国公路学报,2022,35(12):181-192. |
| Wang Jun-hua, Song Hao, Jing Qiang, et al. Road-range tracking of vehicle trajectories based on millimeter-wave radar[J]. China Journal of Highway and Transport, 2022, 35(12): 181-192. | |
| 7 | 余志, 廖琼华, 何兆成. 基于车辆身份感知数据的路段轨迹重构方法研究[J]. 交通运输系统工程与信息, 2019, 19(4): 87-93. |
| Yu Zhi, Liao Qiong-hua, He Zhao-cheng. Vehicle trajectory reconstruction in signalized-link using vehicle identification data[J]. Journal of Transporation Systems Engineering & Information Technology, 2019, 19(4): 87-93. | |
| 8 | Najman P, Zemcik P.Vehicle speed measurement using stereo camera pair[J].IEEE Transactions on Intelligent Transportation Systems, 2020, 99: 1-9. |
| 9 | 胡钊政, 李招康, 陶倩文. 基于分布式二维激光测距仪的室内行人检测与跟踪[J]. 吉林大学学报:工学版, 2020, 50(2): 719-729. |
| Hu Zhao-zheng, Li Zhao-kang, Tao Qian-wen. Indoor pedestrian detection and tracking from distributed two⁃dimensional laser range finders[J]. Journal of Jilin University (Engineering and Technology Edition), 2020, 50(2): 719-729. | |
| 10 | Krajewski R, Bock J, Kloeker L, et al. The highD dataset: a drone dataset of naturalistic vehicle trajectories on german highways for validation of highly automated driving systems[C]∥21st International Conference on Intelligent Transportation Systems, Maui, USA, 2018: 2118-2125. |
| 11 | Mitschke M, Wallentowitz H. Dynamik der kraftfahrzeuge[M]. Berlin: Springer, 1972. |
| 12 | 甘林, 赵丹, 徐垒. 两轴汽车制动减速度计算方法[J]. 汽车实用技术, 2018(9): 32-33. |
| Gan Lin, Zhao Dan, Xu Lei. Calculation method for braking deceleration of two axle vehicles[J]. Automobile Applied Technology, 2018(9): 32-33. | |
| 13 | 郭洪艳, 于文雅, 刘俊, 等. 复杂场景智能车辆车道与速度一体化滚动优化决策[J]. 吉林大学学报:工学版, 2023, 53(3): 693-703. |
| Guo Hong-yan, Yu Wen-ya, Liu Jun, et al. Integrated moving horizon decision⁃making method for lane and speed of intelligent vehicle in complex scenarios[J]. Journal of Jilin University (Engineering and Technology Edition), 2023, 53(3): 693-703. | |
| 14 | 许小勇, 钟太勇. 三次样条插值函数的构造与Matlab实现[J]. 兵工自动化, 2006(11): 76-78. |
| Xu Xiao-yong, Zhong Tai-yong. Construction and realization of cubic spline interpolation function[J]. Ordnance Industry Automation, 2006(11): 76-78. | |
| 15 | 李颖, 赵莉, 赵祥模, 等. 基于大货车GPS数据的轨迹相似性度量有效性研究[J]. 中国公路学报, 2020, 33(2): 146-157. |
| Li Ying, Zhao Li, Zhao Xiang-mo, et al. Effectiveness of trajectory similarity measures based on truck GPS data[J]. China Journal of Highway and Transport, 2020, 33(2): 146-157. | |
| 16 | Ikotun A M, Ezugwu A E, Abualigah L, et al. K-means clustering algorithms: a comprehensive review, variants analysis, and advances in the era of big data[J]. Information Sciences, 2023, 622: 178-210. |
| [1] | 许清津,付锐,郭应时,吴付威. 载货汽车弯道侧翻路侧预测方法[J]. 吉林大学学报(工学版), 2024, 54(5): 1302-1310. |
| [2] | 李爽,林子瑞,叶松,刘旭,赵吉松. 运载火箭推力下降时入轨能力评估与轨迹重构方法[J]. 吉林大学学报(工学版), 2023, 53(8): 2245-2253. |
|