吉林大学学报(工学版) ›› 2025, Vol. 55 ›› Issue (11): 3593-3603.doi: 10.13229/j.cnki.jdxbgxb.20240109
• 交通运输工程·土木工程 • 上一篇
面向人机共驾的车道保持预测控制
章军辉1,2,3,4( ),刘禹希2,4,郭晓满2,4,刘俊泽2,4,丁羽璇2,4
),刘禹希2,4,郭晓满2,4,刘俊泽2,4,丁羽璇2,4
- 1.苏州工学院 电气与自动化工程学院,江苏 苏州 215500
2.无锡物联网创新中心有限公司,江苏 无锡 214029
3.江苏省工业机器人复杂工艺智慧控制工程研究中心,江苏 苏州 215500
4.江苏省物联网创新中心昆山分中心,江苏 苏州 215347
Driver-automation cooperation oriented lane-keeping control employing model predictive control approach
Jun-hui ZHANG1,2,3,4(),Yu-xi LIU2,4,Xiao-man GUO2,4,Jun-ze LIU2,4,Yu-xuan DING2,4
- 1.School of Electrical Engineering and Automation,Suzhou University of Technology,Suzhou 215500,China
2.Wuxi Internet of Things Innovation Center Co. ,Ltd. ,Wuxi 214029,China
3.Jiangsu Engineering Research Center of Industrial Robot Complex Process Intelligent Control,Suzhou 215500,China
4.Kunshan Department,Jiangsu Internet of Things Innovation Center,Suzhou 215347,China
摘要:
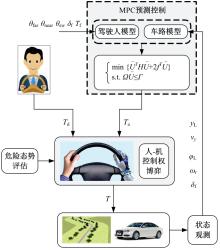
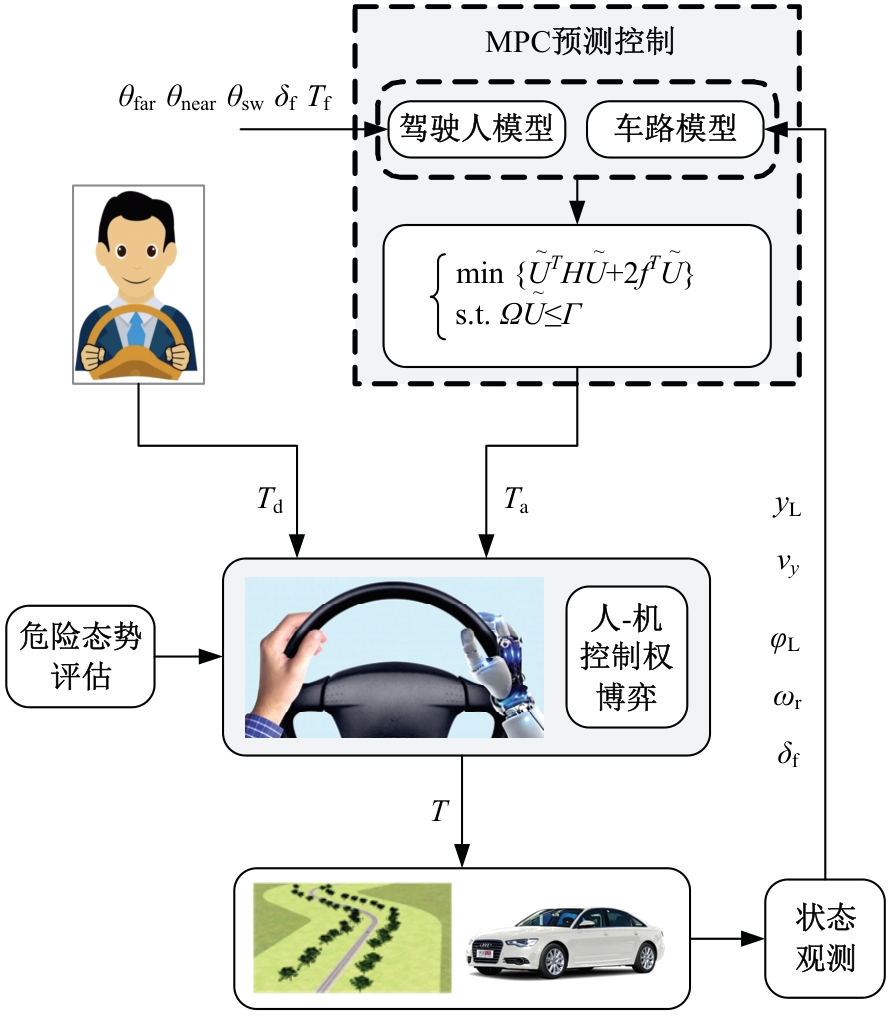
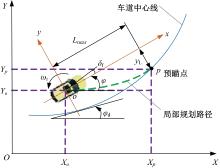
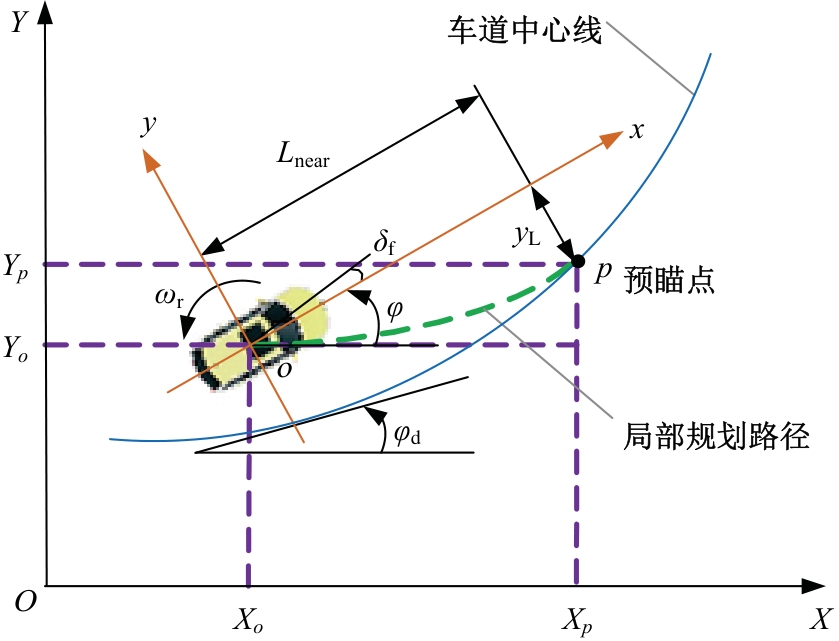
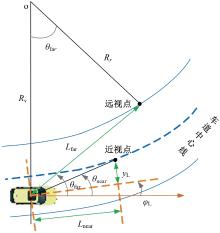
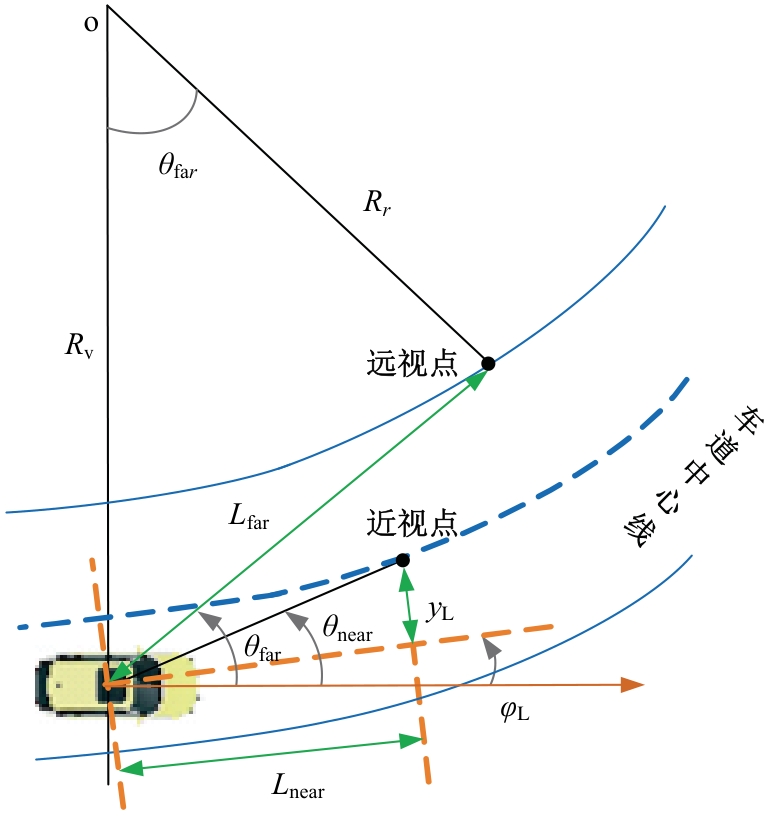
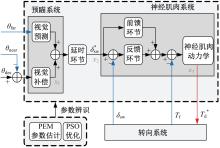
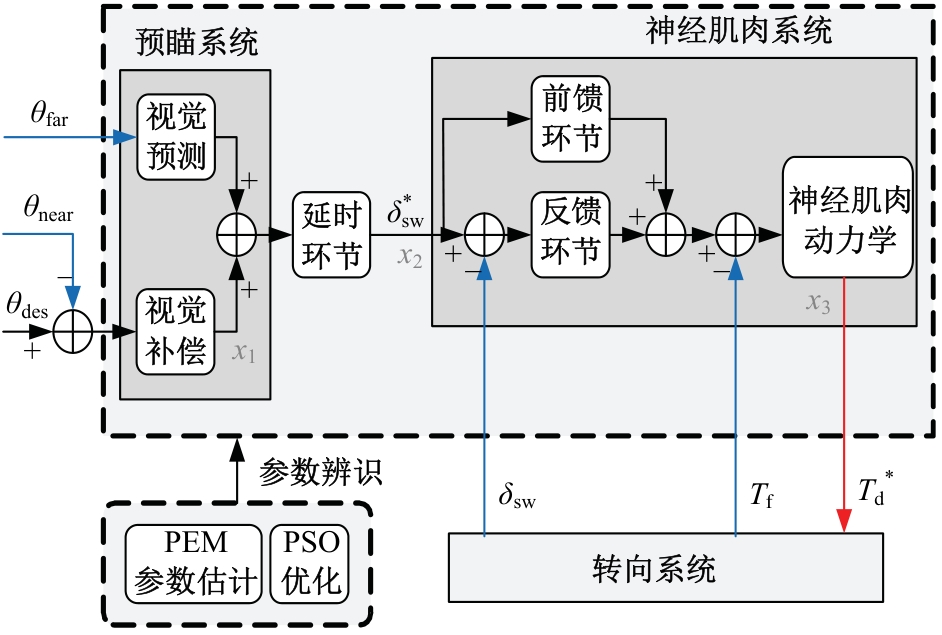
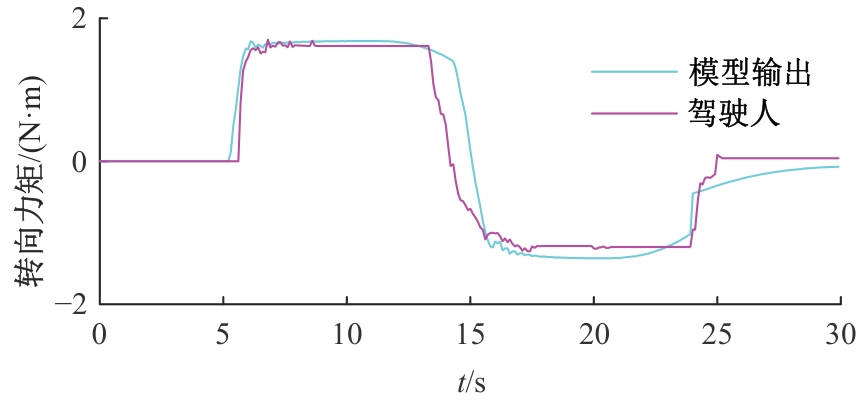
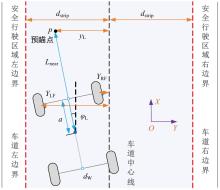
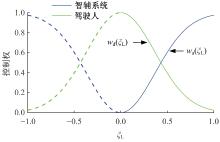
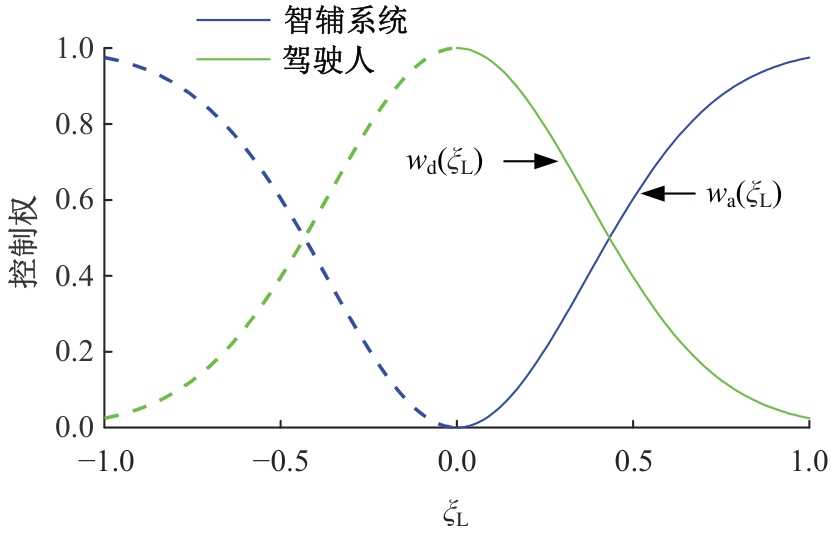
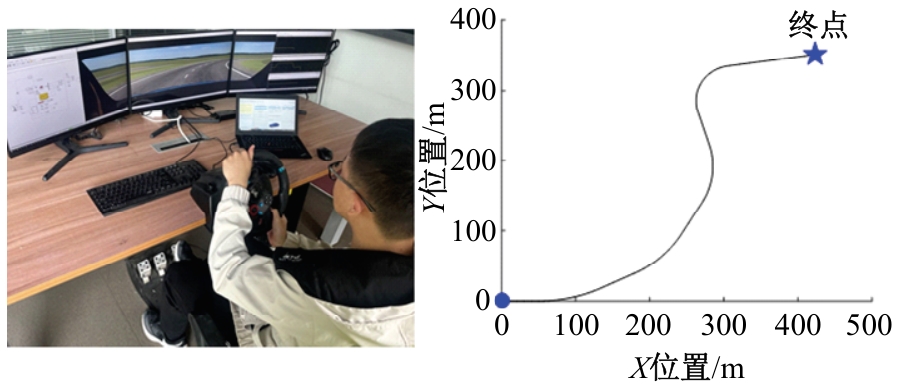
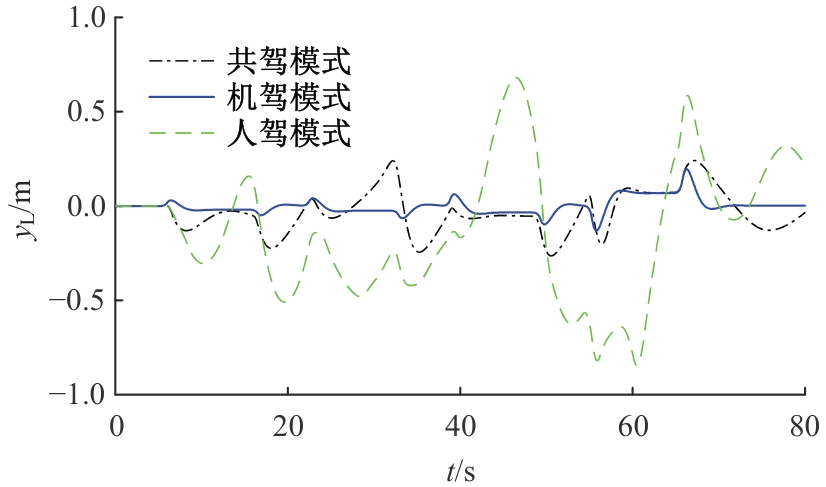
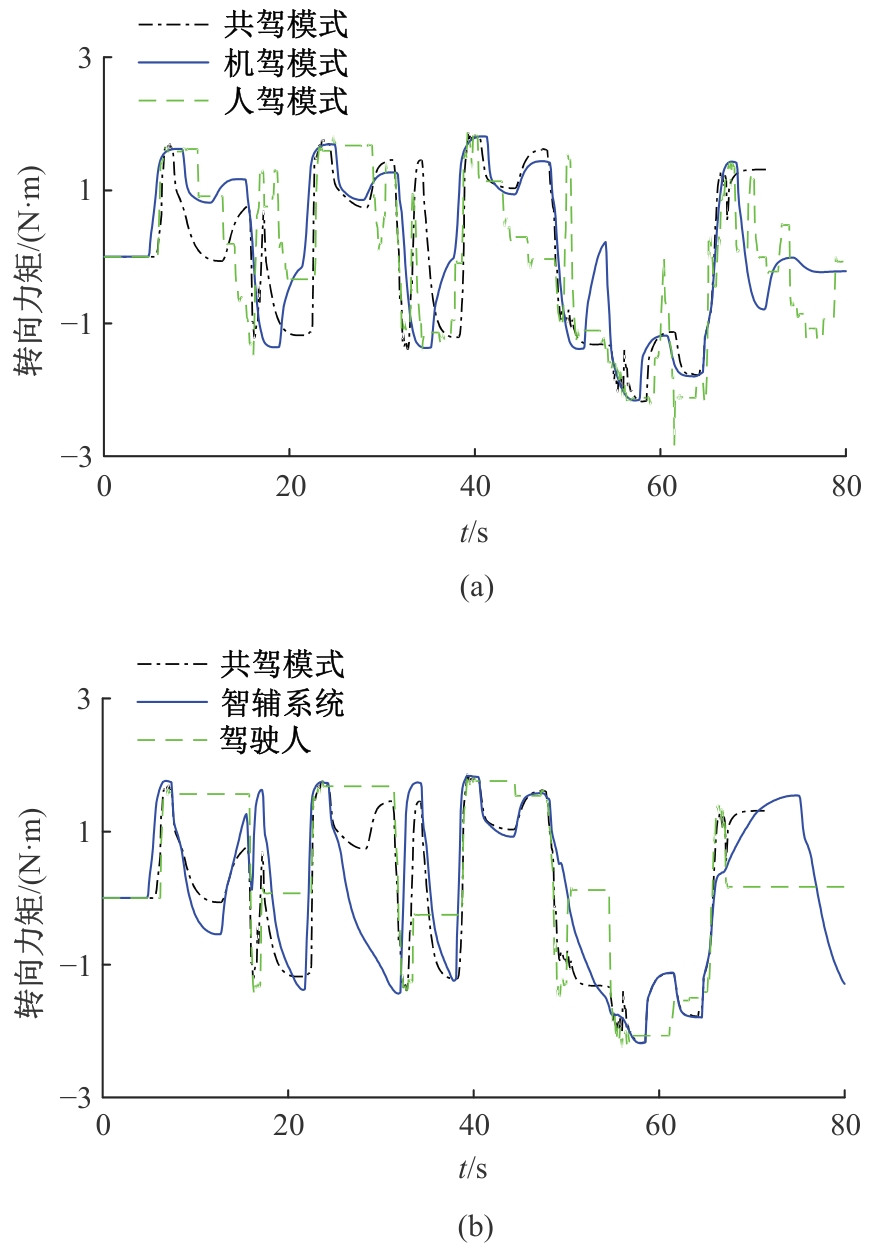
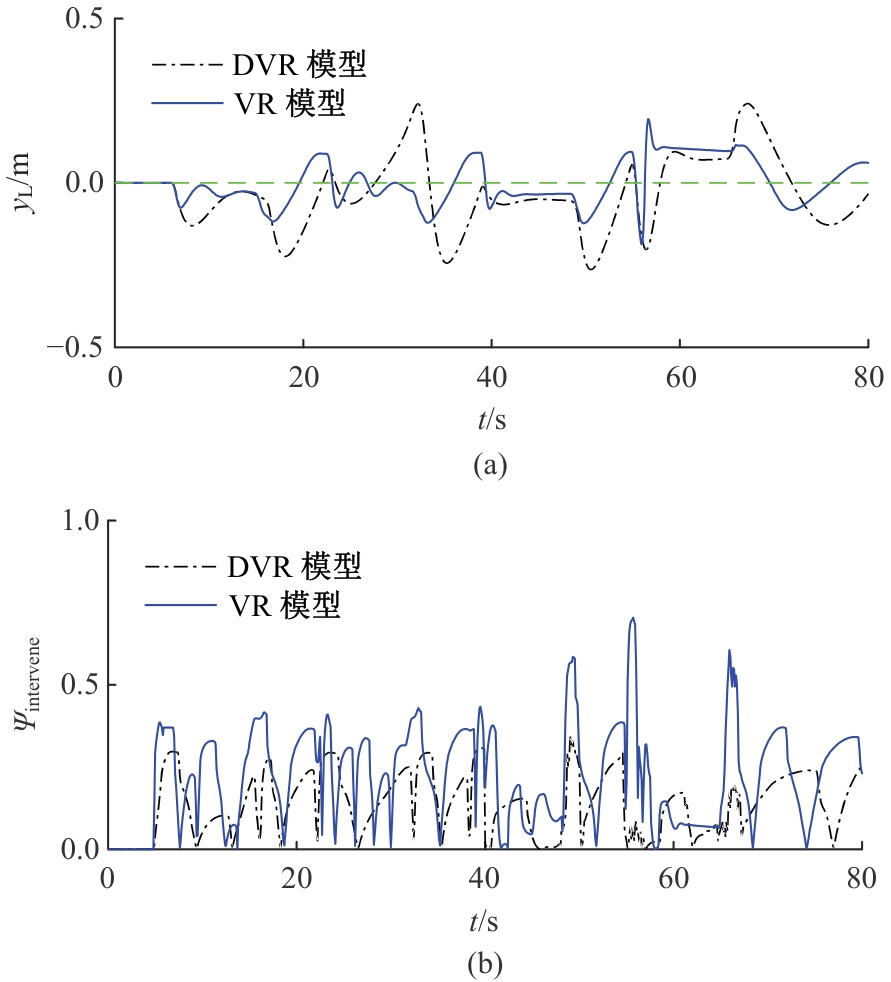
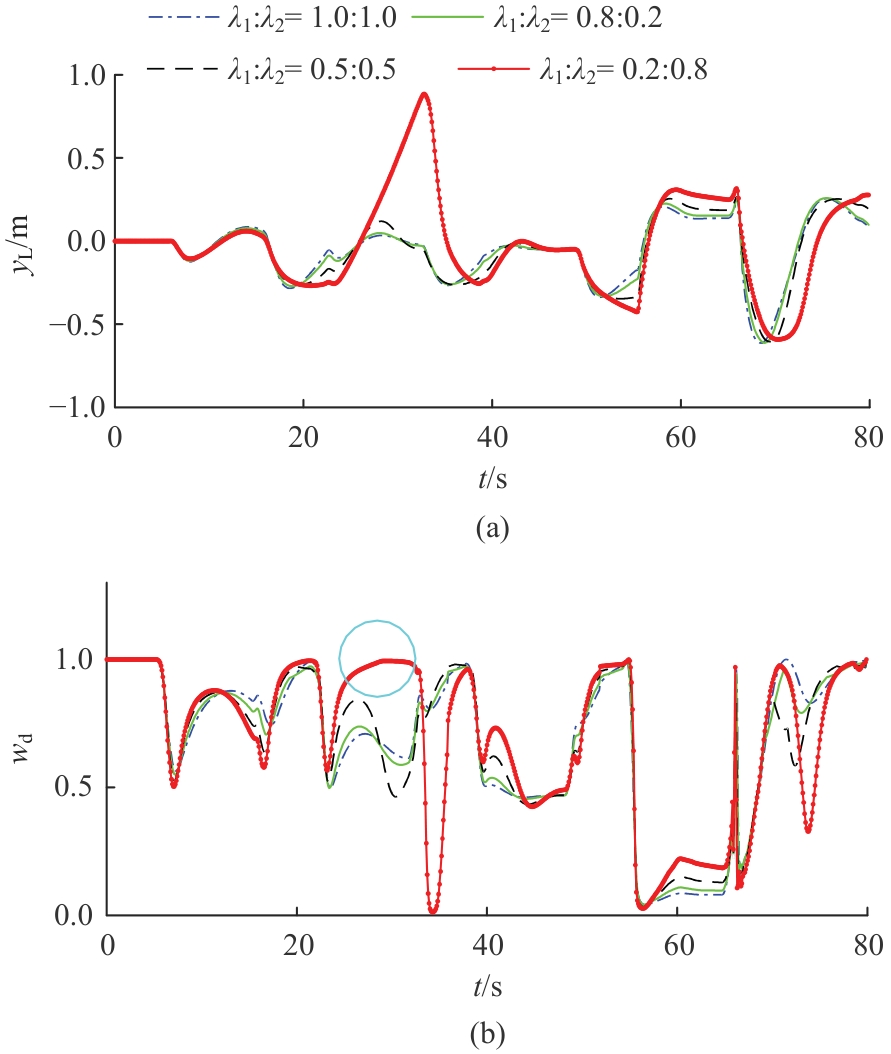
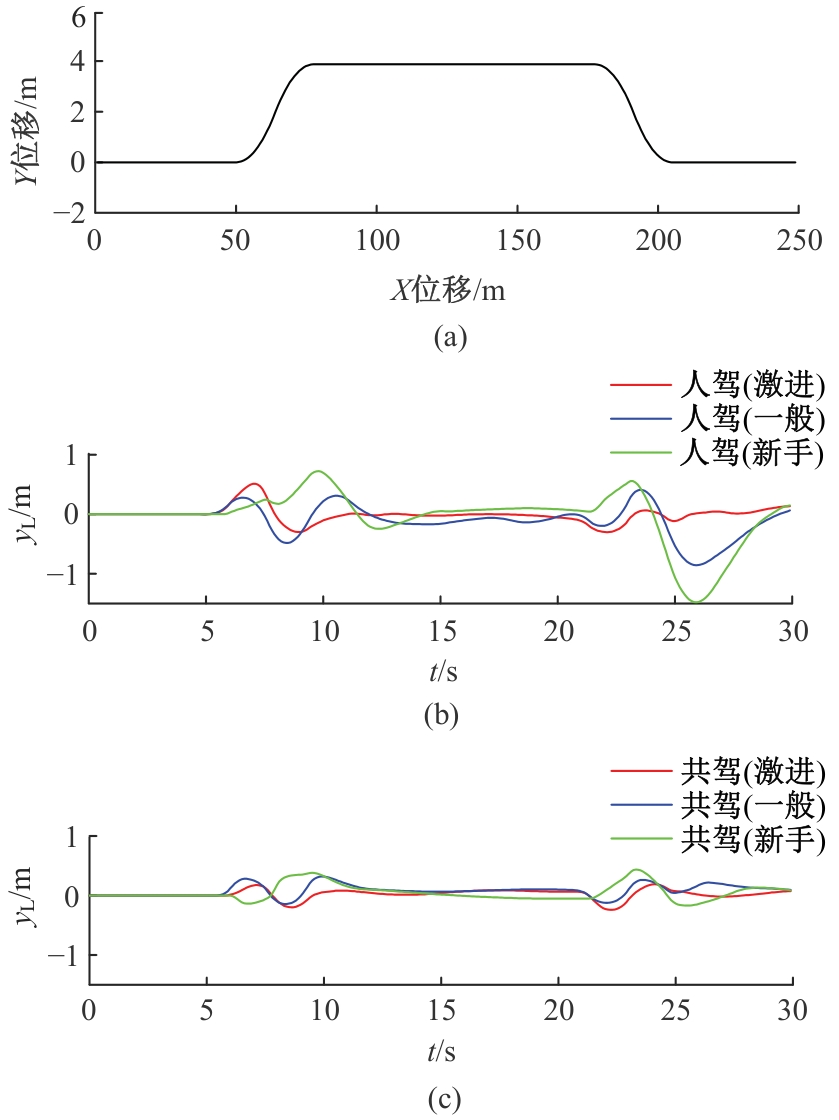
为了更好地描述共驾型车道保持控制系统(LKAS)的结构和行为,让智辅系统能够预判驾驶人的转向控制意图,提出了一种基于闭环人-车-路模型与态势预测因子的车道保持预测控制算法。首先,引入基于视觉预瞄特性与神经肌肉动力学的驾驶人转向模型,利用粒子群优化(PSO)算法对驾驶人转向模型参数进行离线辨识,并将驾驶人纳入控制回路建立了人-车-路模型;其次,基于模型预测控制(MPC)理论构建约束型二次型代价函数,将共驾型LKAS的转向力矩决策问题转化成带约束的在线二次规划(QP)问题;再次,根据预瞄位置处车辆运动状态的发展态势,设计了一种人机控制权决策模型,用以实现人机控制权的平稳动态分配;最后,基于驾驶人在环的CarSim/Simulink集成环境对该共享控制算法进行了验证与探讨,结果表明:本文提出的共享控制算法能够一定程度上减少智辅系统对驾驶人的干预,即智辅系统能够预判驾驶人的转向控制意图,从而加深共驾过程中智辅系统与驾驶人之间的合作程度,但是以牺牲横向运动控制精度为代价。
中图分类号:
- U461





| [1] | Marcano M, Díaz S, Pérez J, al et, A review of shared control for automated vehicles : theory and applications[J]. IEEE Transactions on Human-Machine Systems, 2020, 50(6): 475-491. |
| [2] | 宗长富, 代昌华, 张东. 智能汽车的人机共驾技术研究现状和发展趋势[J]. 中国公路学报, 2021, 34(6): 214-237. |
| Zong Chang-fu, Dai Chang-hua, Zhang Dong. Human-machine interaction technology of intelligent vehicles: current development trends and future directions[J]. China Journal of Highway and Transport, 2021, 34(6):214-237. | |
| [3] | Li M J, Cao H T, Song X L, et al. Shared control driver assistance system based on driving intention and situation assessment[J]. IEEE Transactions on Industrial Informatics, 2018, 14 (11): 4982-4994. |
| [4] | Wu Y, Wei H, Chen X, et al. Adaptive authority allocation of human-automation shared control for autonomous vehicle[J]. International Journal of Automotive Technology, 2020, 21(3): 541-553. |
| [5] | Li M, Cao H, Song X, et al. Shared control driver assistance system based on driving intention and situation assessment[J]. IEEE Transactions on Industrial Informatics, 2018, 14(11): 4982-4994. |
| [6] | 郭柏苍, 王胤霖, 谢宪毅, 等. 基于人-车风险状态的人机共驾控制权决策方法[J]. 中国公路学报, 2022, 35(3): 153-165. |
| Guo Bai-cang, Wang Yin-lin, Xie Xian-yi,et al. Decision making method for control right transition of human-machine shared driving based on driver-vehicle risk state[J]. China Journal of Highway and Transport, 2022, 35(3):153-165. | |
| [7] | Dai C, Zong C, Zhang D, et al. A bargaining game-based human-machine shared driving control authority allocation strategy[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(10): 10572-10586. |
| [8] | Liu R, Zhao X, Zhu X, et al. A human-like shared driving strategy in lane-changing scenario using cooperative LPV/MPC[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(9): 9915-9928. |
| [9] | Yan Z, Yang K, Wang Z, et al. Intention-based lane changing and lane keeping haptic guidance steering system[J]. IEEE Transactions on Intelligent Vehicles, 2021, 6(4): 622-633. |
| [10] | Noh S, An K, Han W. Situation assessment and behavior decision for vehicle/driver cooperative driving in highway environments[C]∥Proceedings of 2015 IEEE International Conference on Automation Science and Engineering, Gothenburg, Sweden, 2015: 626-633. |
| [11] | 陈无畏, 王其东, 丁雨康, 等. 基于预期偏移距离的人机权值分配策略研究[J]. 汽车工程, 2020, 42(4):101-109. |
| Chen Wu-wei, Wang Qi-dong, Ding Yu-kang, et al. Weight allocation strategy between human and machine based on the preview distance to lane center[J]. Automotive Engineering, 2020, 42(4):101-109. | |
| [12] | Guo C, Sentouh C, Popieul J C, et al. Predictive shared steering control for driver override in automated driving: a simulator study[J]. Transportation Research Part F: Traffic Psychology and Behavior, 2019, 61:326-336. |
| [13] | Wada T, Sonoda K, Okasaka T, et al. Authority transfer method from automated to manual driving via haptic shared control[C]∥Proceedings of the 2016 IEEE International Conference on Systems, Man, and Cybernetics (SMC), Budapest, Hungary, 2016, 2659-2664. |
| [14] | Nguyen A, Sentouh C, Popieul J. Sensor reduction for driver-automation shared steering control via an adaptive authority allocation strategy[J]. IEEE/ASME Transactions on Mechatronics, 2018, 23(1): 5-16. |
| [15] | Nguyen A, Sentouh C, Popieul J. Driver-automation cooperative approach for shared steering control under multiple system constraints: design and experiments[J]. IEEE Transactions on Industrial Electronics, 2017, 64(5): 3819-3830. |
| [16] | Benloucif A, Nguyen A T, Sentouh C, et al. Cooperative trajectory planning for haptic shared control between driver and automation in highway driving[J]. IEEE Transactions on Industrial Electronics, 2019, 66(12):9846-9857. |
| [17] | 田彦涛, 赵彦博, 谢波. 基于驾驶员转向模型的共享控制系统[J]. 自动化学报,2022, 48(7): 1664-1677. |
| Tian Yan-tao, Zhao Yan-bo, Xie Bo. Shared control system based on driver steering model[J]. Acta Automatica Sinica, 2022, 48(7): 1664-1677. | |
| [18] | 李学鋆, 汪怡平, 苏楚奇, 等. 考虑驾驶权动态分配的共享转向系统鲁棒控制[J]. 汽车工程, 2022, 44(11): 1676-1688. |
| Li Xue-yun, Wang Yi-ping, Su Chu-qi, et al. Robust control for shared steering control system based on authority level dynamic allocation[J]. Automotive Engineering, 2022, 44(11): 1676-1688. | |
| [19] | Guo H, Song L, Liu J, et al. Hazard-evaluation-oriented moving horizon parallel steering control for driver-automation collaboration during automated driving[J]. IEEE/CAA Journal of Automatica Sinica, 2018, 5(6): 1062-1073. |
| [20] | 高振刚, 陈无畏, 谈东奎, 等. 考虑驾驶员操纵失误的车道偏离辅助人机协同控制[J]. 机械工程学报, 2019, 55(16): 91-103. |
| Gao Zhen-gang, Chen Wu-wei, Tan Dong-kui, et al. Human-machine cooperative lane departure assist control considering driver manipulate failure[J]. Journal of Mechanical Engineering, 2019, 55(16):91-103. | |
| [21] | Sentouh C, Nguyen A T, Benloucif M A, et al. Driver-automation cooperation oriented approach for shared control of lane keeping assist systems[J]. IEEE Transactions on Control Systems Technology, 2019, 27(5):1962-1978. |
| [22] | Wei C, Ji Z, Cai B. Particle swarm optimization for cooperative multi-robot task allocation: a multi-objective approach[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 2530-2537. |
| [23] | 章军辉, 李庆, 陈大鹏. 实时多目标权重弯道跟随预测控制[J].天津大学学报: 自然科学与工程技术版, 2020, 53(8): 861-871. |
| Zhang Jun-hui, Li Qing, Chen Da-peng. Multi-objective real-time weighted model predictive control for car-following[J]. Journal of Tianjin University (Science and Technology), 2020, 53(8):861-871. | |
| [24] | Sentouh C, Debernard S, Popieul J, et al. Toward a shared lateral control between driver and steering assist controller[C]∥Analysis, Design, and Evaluation of Human-Machine Systems, Université de Valenciennes et du Hainaut Cambrésis, Valenciennes,France, 2010:404-409. |
| [1] | 霍震,金立生,华强,贺阳. 基于边缘特征引导的智能汽车语义分割方法[J]. 吉林大学学报(工学版), 2025, 55(9): 3032-3041. |
| [2] | 郭洪艳,张家铭,刘俊,胡云峰. 面向智能汽车-行人交互的虚拟测试场景构建[J]. 吉林大学学报(工学版), 2024, 54(9): 2511-2519. |
| [3] | 谢宪毅,张明君,金立生,周彬,胡涛,白宇飞. 考虑舒适度的智能汽车人工蜂群轨迹规划方法[J]. 吉林大学学报(工学版), 2024, 54(6): 1570-1581. |
| [4] | 高镇海,蔡荣贵,孙天骏,于桐,赵浩源,班浩. 人机共驾下的驾驶行为数据滤波方法[J]. 吉林大学学报(工学版), 2024, 54(3): 589-599. |
| [5] | 张玮,张树培,罗崇恩,张生,王国林. 智能汽车紧急工况避撞轨迹规划[J]. 吉林大学学报(工学版), 2022, 52(7): 1515-1523. |
| [6] | 何仁,赵晓聪,杨奕彬,王建强. 基于驾驶人风险响应机制的人机共驾模型[J]. 吉林大学学报(工学版), 2021, 51(3): 799-809. |
| [7] | 张琳, 章新杰, 郭孔辉, 王超, 刘洋, 刘涛. 未知环境下智能汽车轨迹规划滚动窗口优化[J]. 吉林大学学报(工学版), 2018, 48(3): 652-660. |
|
||