吉林大学学报(工学版) ›› 2021, Vol. 51 ›› Issue (3): 799-809.doi: 10.13229/j.cnki.jdxbgxb20200092
基于驾驶人风险响应机制的人机共驾模型
何仁1( ),赵晓聪1,杨奕彬2,王建强2()
),赵晓聪1,杨奕彬2,王建强2()
- 1.江苏大学 汽车与交通工程学院,江苏 镇江 212013
2.清华大学 汽车安全与节能国家重点实验室,北京 100084
Man⁃machine shared driving model using risk⁃response mechanism of human driver
Ren HE1(),Xiao-cong ZHAO1,Yi-bin YANG2,Jian-qiang WANG2()
- 1.School of Automotive and Traffic Engineering,Jiangsu University,Zhenjiang 212013,China
2.State Key Laboratory of Automotive Safety and Energy,Tsinghua University,Beijing 100084,China
摘要:
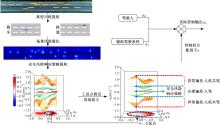
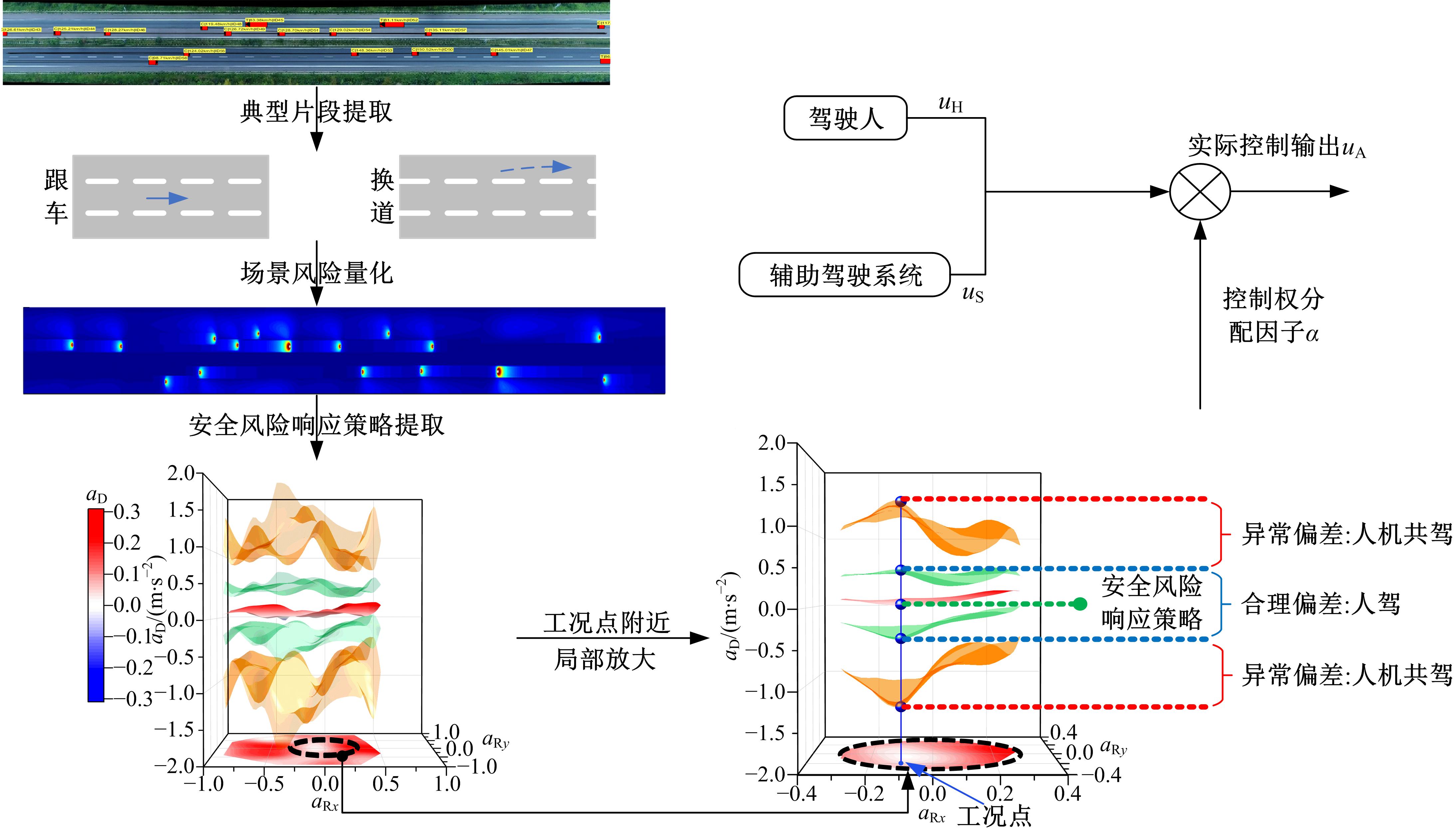
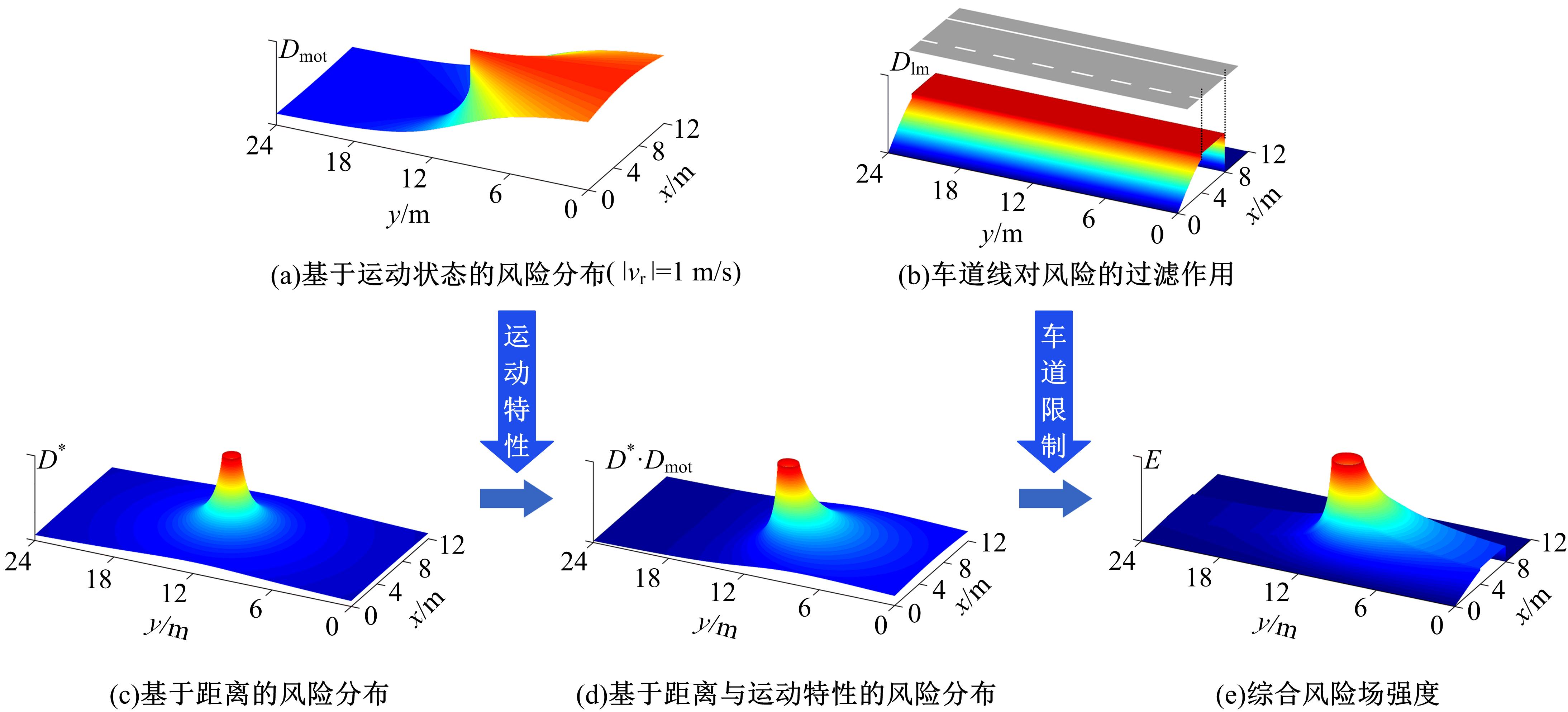
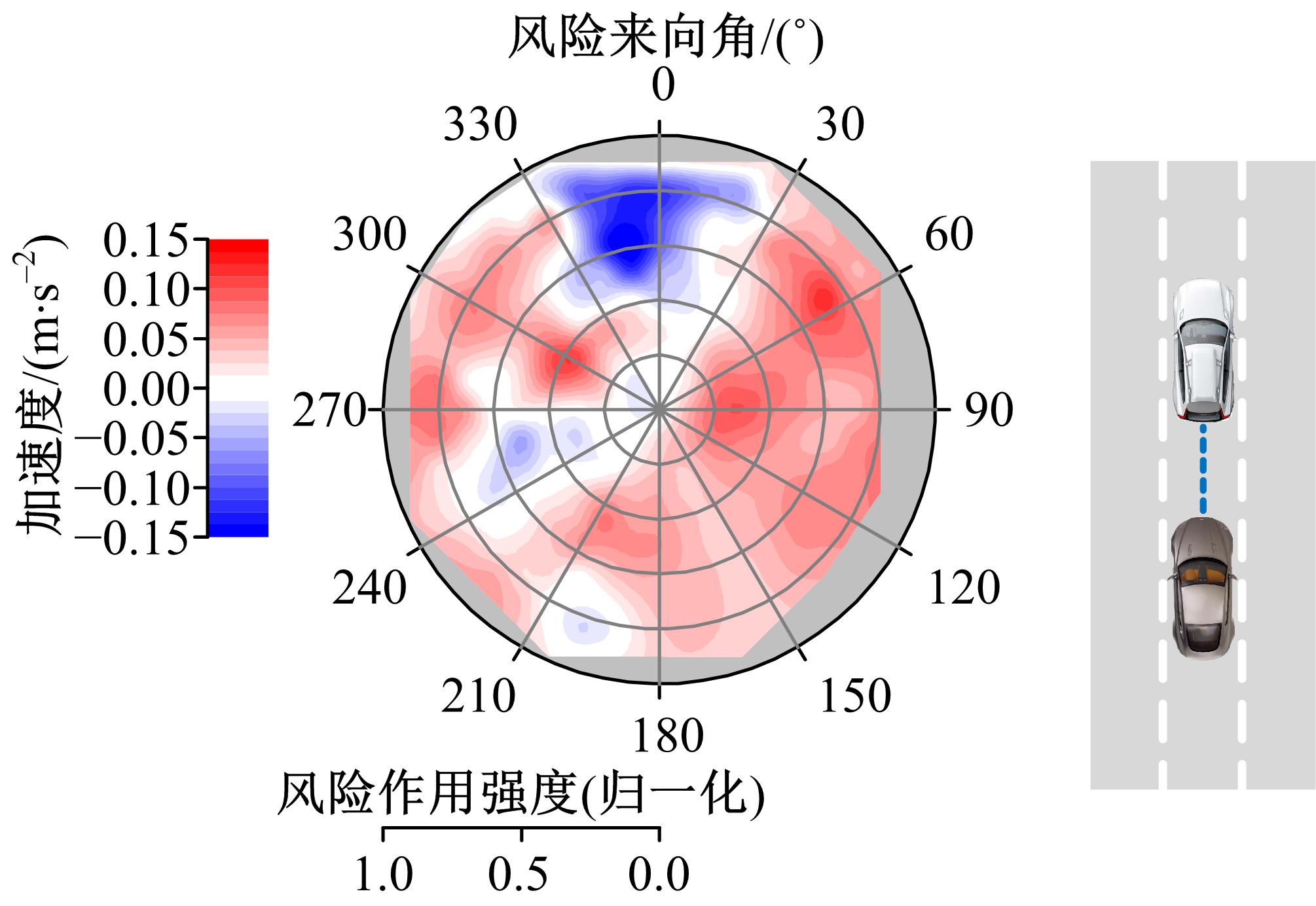
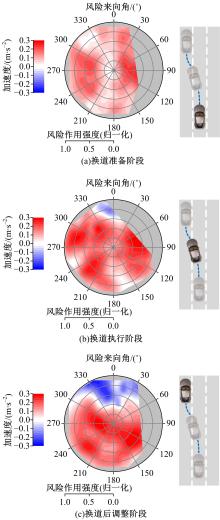
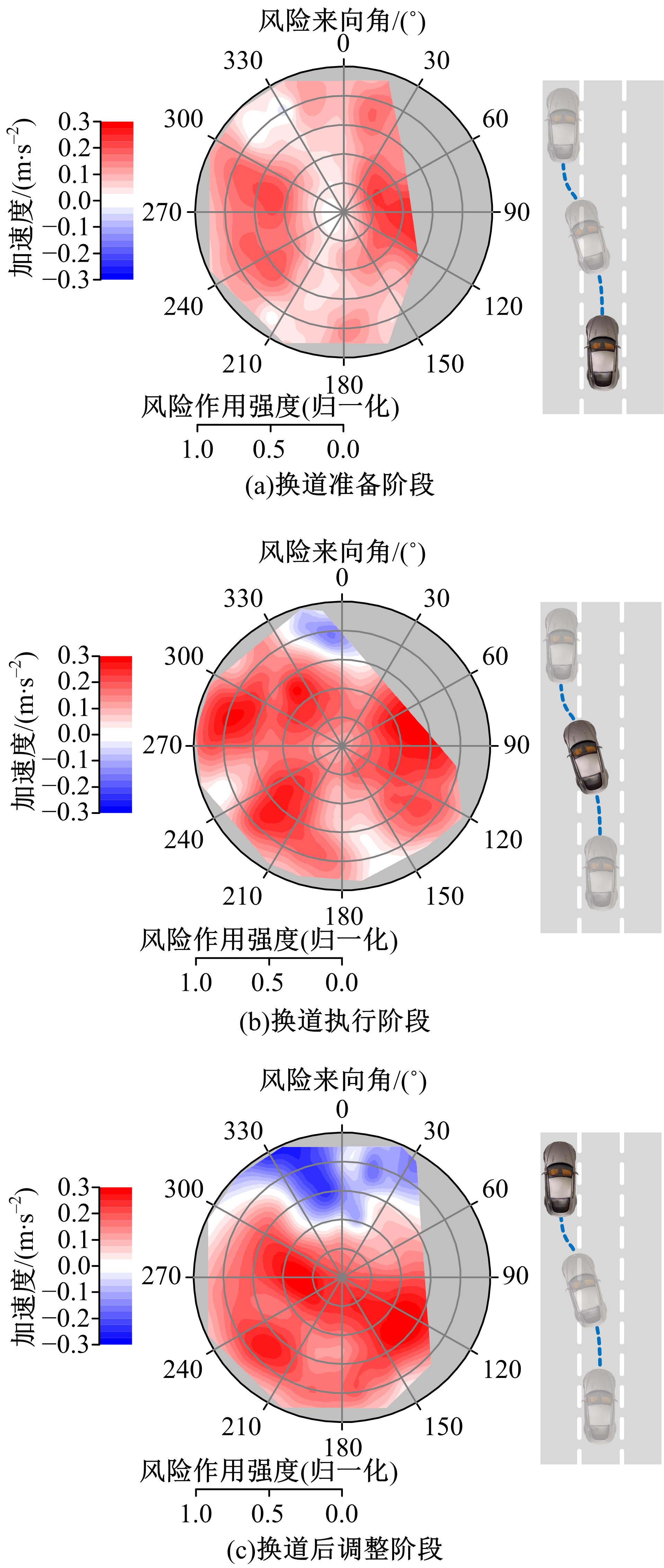
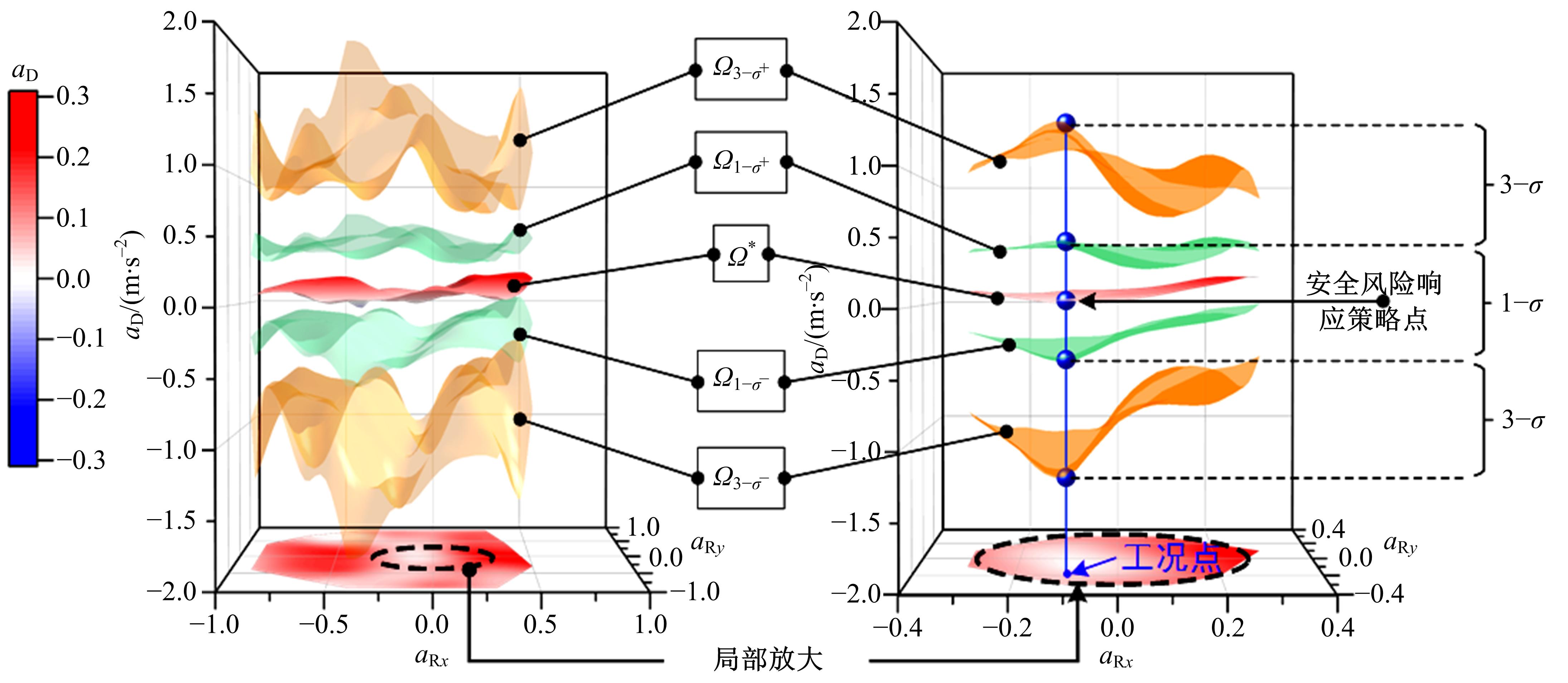
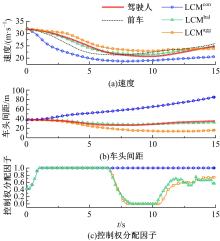
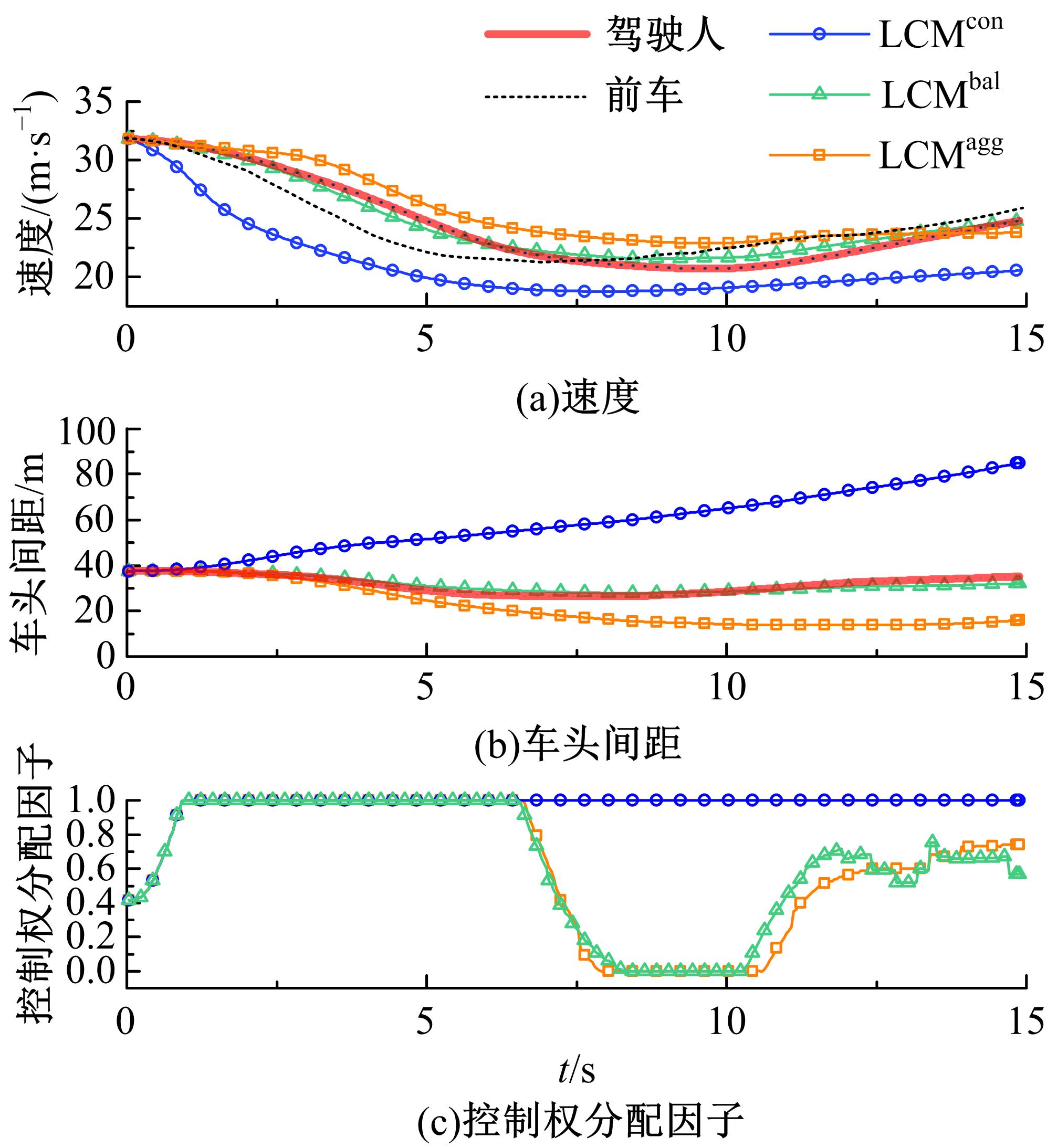
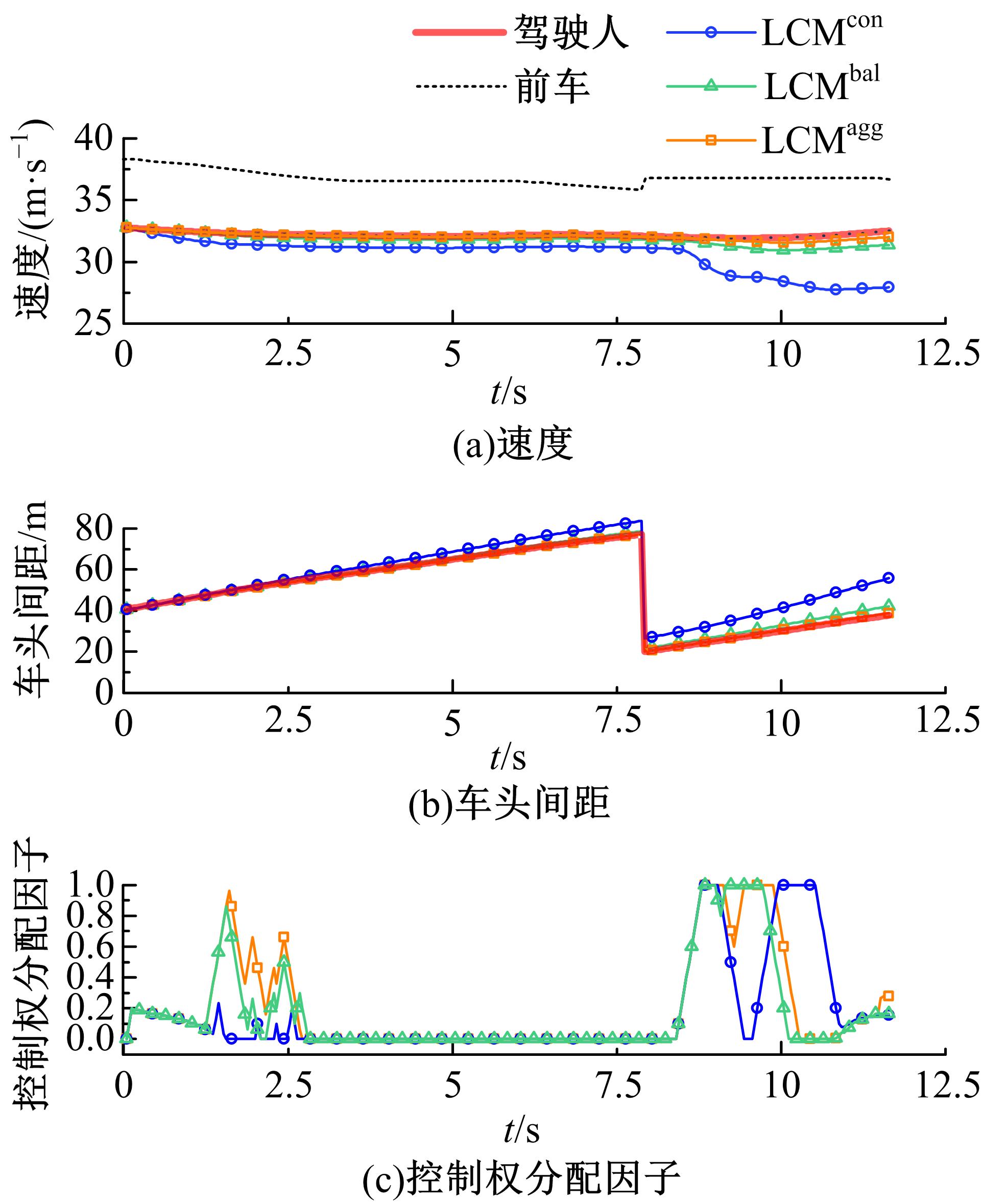
提出了一种根据驾驶人对环境风险的实时响应进行控制权切换的智能汽车人机共驾模型。首先,从基于真实道路信息的highD数据集中提取出跟车和并道两类典型驾驶片段。接着,应用行车风险场理论对驾驶片段中的环境风险进行统一量化。然后,通过拟合环境风险作用与驾驶人的行驶加速度,得到安全风险响应策略曲面,并提出了基于策略偏差的人机共驾控制权柔性切换模型(FCTM)。最后,以纵向控制模型(LCM)作为辅助控制模型,在前车紧急制动和旁车切入两类危险场景中进行了人机共驾仿真实验。结果表明:本文FCTM模型可以通过平稳的人机控制权切换,修正驾驶人在危险场景中的驾驶操作,提高行驶安全性。
中图分类号:
- U491.25






| 1 | Walch M, Colley M, Weber M. Driving-task-related human-machine interaction in automated driving: towards a bigger picture[C]∥11th International Conference on Automotive User Interfaces and Interactive Vehicular Applications: Adjunct Proceedings—AutomotiveUI'19, Utrecht, Netherlands, 2019:427-433. |
| 2 | Blaschke C, Breyer F, Färber B, et al. Driver distraction based lane-keeping assistance[J]. Transportation Research Part F: Traffic Psychology and Behaviour, 2009, 12(4):288-299. |
| 3 | Chen L, Yang C. Control authority determination of a vehicle lane keeping assist controller[C]∥2009 IEEE Intelligent Vehicles Symposium, Xi'an, China, 2009:1383-1388. |
| 4 | 刘瑞, 朱西产, 刘霖, 等. 基于非合作模型预测控制的人机共驾策略[J]. 同济大学学报:自然科学版, 2019, 47(7):1037-1045. |
| Liu Rui, Zhu Xi-chan, Liu Lin, et al. Cooperative driving strategy based on non-cooperative model predictive control[J]. Journal of Tongji University: Natural Science, 2019, 47(7):1037-1045. | |
| 5 | Li R, Li Y, Li S E, et al. Driver-automation indirect shared control of highly automated vehicles with intention-aware authority transition[C]∥2017 IEEE Intelligent Vehicles Symposium, Los Angeles, CA, USA, 2017:26-32. |
| 6 | Li R, Li S, Gao H, et al. Effects of human adaptation and trust on shared control for driver-automation cooperative driving[C]∥SAE Technical Paper, 2017-01-1987. |
| 7 | Treat J R, Tumbas N S, McDonald S T, et al. Tri-level study of the causes of traffic accidents: final report[R]. Washington DC, USA: National Highway Traffic Safety Administration, 1979. |
| 8 | Wilde G J S. The theory of risk homeostasis: Implications for safety and health[J]. Risk Analysis, 1982, 2(4):209-225. |
| 9 | 把余韬. 基于行为和生理指标的驾驶风险分析与模式识别研究[D]. 北京:清华大学机械工程学院, 2015. |
| Ba Yu-tao. Risk factors identification during driving based on behavioral and physiological measures[D]. Beijing:Department of Industrial Engineering, Tsinghua University, 2015. | |
| 10 | Krajewski R, Bock J, Kloeker L, et al. HighD dataset[EB/OL]. [2020-05-10]. |
| 11 | Krajewski R, Bock J, Kloeker L, et al. The highD dataset: a drone dataset of naturalistic vehicle trajectories on German highways for validation of highly automated driving systems[C]∥IEEE International Conference on Intelligent Transportation Systems (ITSC), Maui, HI, USA, 2018:2118-2125. |
| 12 | 季学武, 费聪, 何祥坤, 等. 基于LSTM网络的驾驶意图识别及车辆轨迹预测[J]. 中国公路学报, 2019, 32(6):34-42. |
| Ji Xue-wu, Fei Cong, He Xiang-kun, et al. Intention recognition and trajectory prediction for vehicles using LSTM network[J]. China Journal of Highway and Transport, 2019, 32(6):34-42. | |
| 13 | 王建强, 吴剑, 李洋. 基于人-车-路协同的行车风险场概念、原理及建模[J]. 中国公路学报, 2016, 29(1):105-114. |
| Wang Jian-qiang, Wu Jian, Li Yang. Concept, principle and modeling of driving risk field based on driver-vehicle-road interaction[J]. China Journal of Highway and Transport, 2016, 29(1):105-114. | |
| 14 | Wang J, Wu J, Li Y. The driving safety field based on driver-vehicle-road interactions[J]. IEEE Transactions on Intelligent Transportation Systems, 2015,16(4):2203-2214. |
| 15 | Wang J, Wu J, Zheng X, et al. Driving safety field theory modeling and its application in pre-collision warning system[J]. Transportation Research Part C:Emerging Technologies,2016,72:306-324. |
| 16 | Zheng X, Zhang D, Gao H, et al. A novel framework for road traffic risk assessment with HMM-based prediction model[J]. Sensors,2018,18(12):4313. |
| 17 | 傅贵. 安全管理学:事故预防的行为控制方法[M]. 北京:科学出版社, 2013. |
| 18 | Macadam C C. Understanding and modeling the human driver[J]. Vehicle System Dynamics,2003,40(1-3):101-134. |
| 19 | 许洪国,张慧永,宗芳. 交通事故致因分析的贝叶斯网络建模[J]. 吉林大学学报:工学版,2011,41():89-94. |
| Xu Hong-guo, Zhang Hui-yong, Zong Fang. Bayesian network modeling for causation analysis of traffic accident[J]. Journal of Jilin University (Engineering and Technology Edition), 2011, 41(Sup.1):89-94. | |
| 20 | Wetton M A, Hill A, Horswill M S. The development and validation of a hazard perception test for use in driver licensing[J]. Accident Analysis & Prevention, 2011, 43(5):1759-1770. |
| 21 | Driving in Germany—travel guide at Wikivoyage[EB/OL]. [2020-05-10]. |
| 22 | Ni D, Leonard J D, Jia C, et al. Vehicle longitudinal control and traffic stream modeling[J]. Transportation Science, 2016, 50(3):1016-1031. |
| [1] | 宋大凤,杨丽丽,曾小华,王星琦,梁伟智,杨南南. 基于行驶工况合成的混合动力汽车电池寿命优化[J]. 吉林大学学报(工学版), 2021, 51(3): 781-791. |
| [2] | 张家旭,王欣志,赵健,施正堂. 汽车高速换道避让路径规划及离散滑模跟踪控制[J]. 吉林大学学报(工学版), 2021, 51(3): 1081-1090. |
| [3] | 王波,何洋扬,聂冰冰,许述财,张金换. 底部爆炸条件下车内乘员的腹部损伤[J]. 吉林大学学报(工学版), 2021, 51(3): 792-798. |
| [4] | 李寿涛,王蕊,徐靖淳,王德军,田彦涛,于丁力. 一种基于模型预测复合控制的车辆避碰控制方法[J]. 吉林大学学报(工学版), 2021, 51(2): 738-746. |
| [5] | 王伟达,武燕杰,史家磊,李亮. 基于驾驶员意图识别的电子液压制动助力系统控制策略[J]. 吉林大学学报(工学版), 2021, 51(2): 406-413. |
| [6] | 陈国迎,姚军,王鹏,夏其坤. 适用于后轮轮毂驱动车辆的稳定性控制策略[J]. 吉林大学学报(工学版), 2021, 51(2): 397-405. |
| [7] | 马芳武,梁鸿宇,王强,蒲永锋. 双材料负泊松比结构的面内冲击动力学性能[J]. 吉林大学学报(工学版), 2021, 51(1): 114-121. |
| [8] | 吴岛,张立斌,张云翔,单洪颖,单红梅. 基于滑移率辨识的汽车制动时序视觉检测方法[J]. 吉林大学学报(工学版), 2021, 51(1): 206-216. |
| [9] | 张恩慧,何仁,苏卫东. 不同挡板结构对油箱内油液晃动特性的数值分析[J]. 吉林大学学报(工学版), 2021, 51(1): 83-95. |
| [10] | 熊璐,魏琰超,高乐天. 基于惯性测量单元/轮速融合的车辆零速检测方法[J]. 吉林大学学报(工学版), 2021, 51(1): 134-138. |
| [11] | 陈吉清,蓝庆生,兰凤崇,刘照麟. 基于轮胎力预判与拟合的轨迹跟踪控制[J]. 吉林大学学报(工学版), 2020, 50(5): 1565-1573. |
| [12] | 杨志刚,范亚军,夏超,储世俊,单希壮. 基于双稳态尾迹的方背Ahmed模型减阻[J]. 吉林大学学报(工学版), 2020, 50(5): 1635-1644. |
| [13] | 沈哲,王毅刚,杨志刚,贺银芝. 风洞中未知声源漂移误差的逼近修正[J]. 吉林大学学报(工学版), 2020, 50(5): 1584-1589. |
| [14] | 刘钊,程江琳,朱玉田,郑立辉. 轨道车辆垂向振动建模及运动关联分析[J]. 吉林大学学报(工学版), 2020, 50(5): 1600-1607. |
| [15] | 高菲,肖阳,张文华,祁锦轩,李子樵,马骁远. 高温和荷电状态对锂离子电池单体力学响应的耦合影响[J]. 吉林大学学报(工学版), 2020, 50(5): 1574-1583. |
|
||