Journal of Jilin University(Engineering and Technology Edition) ›› 2023, Vol. 53 ›› Issue (9): 2666-2675.doi: 10.13229/j.cnki.jdxbgxb.20211293
Previous Articles Next Articles
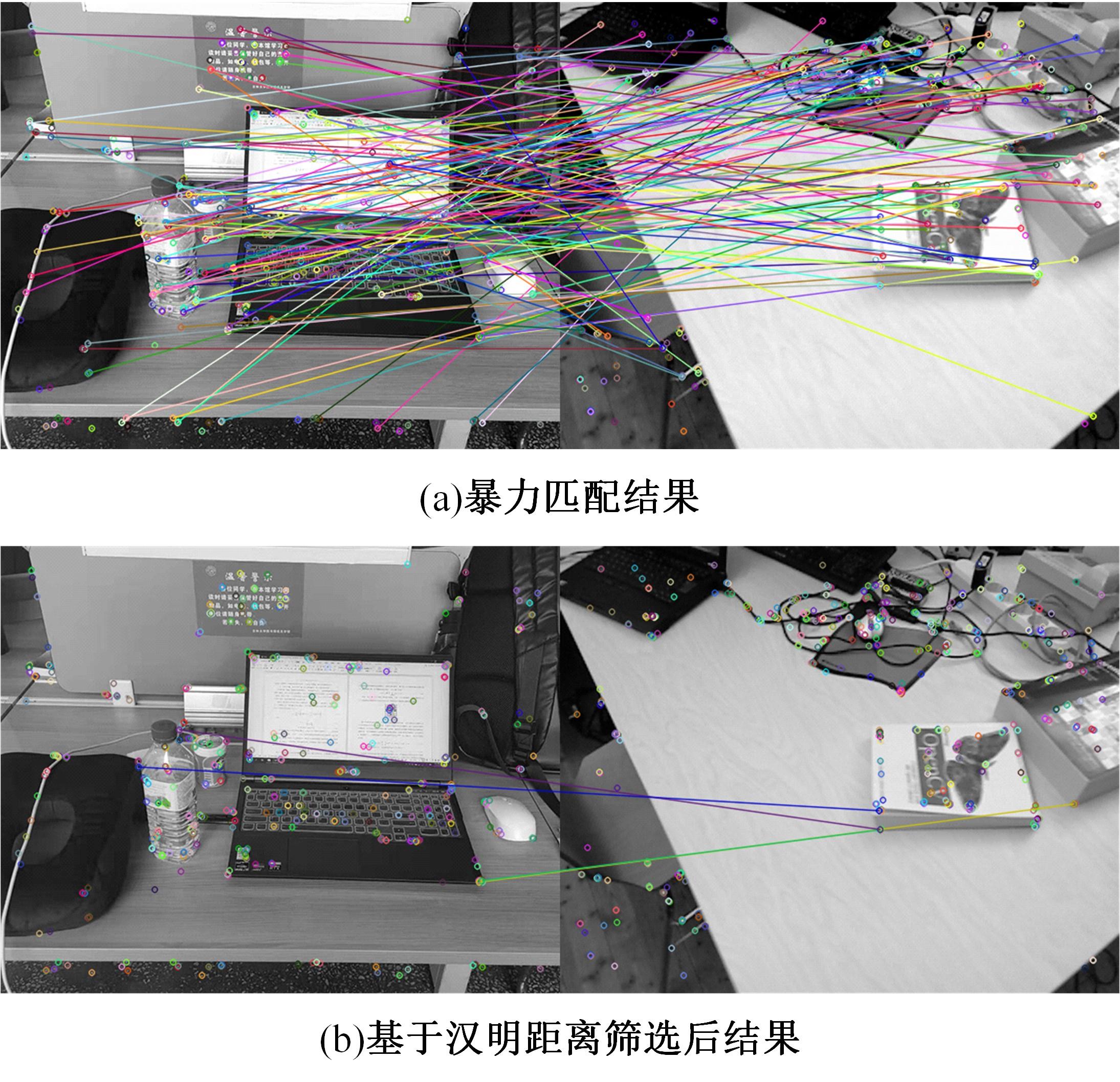
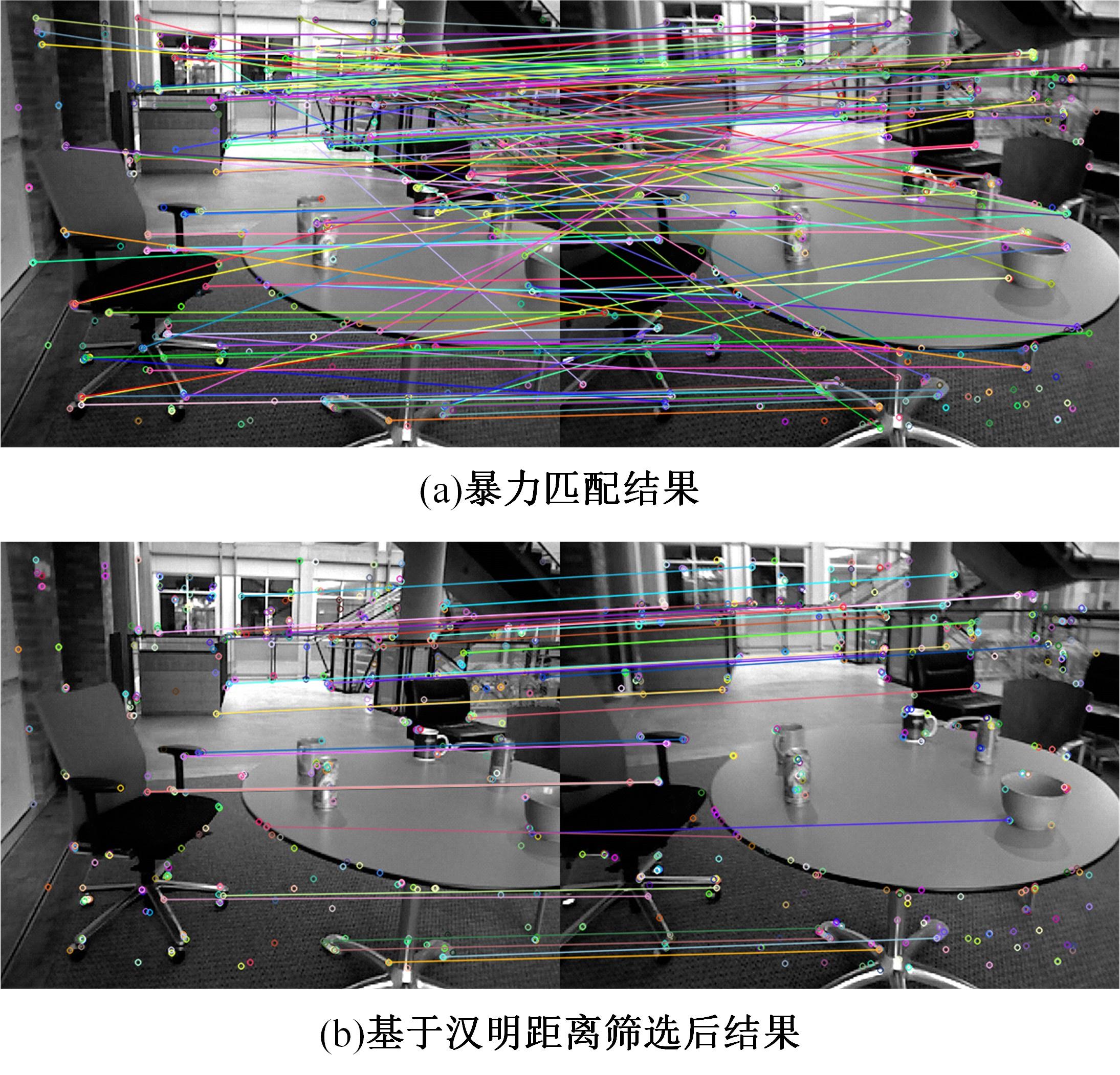
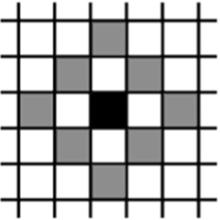
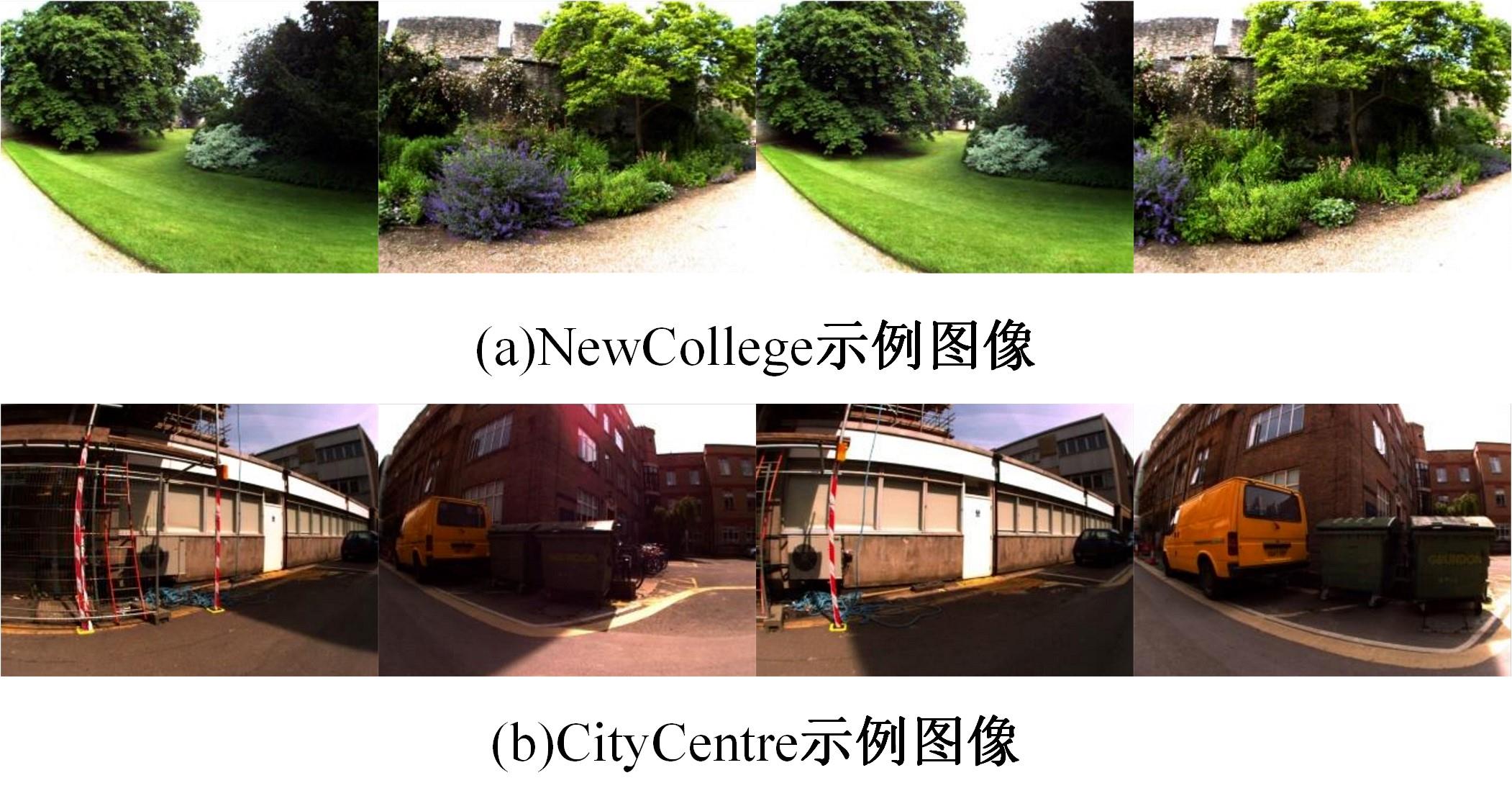
Loop detection based on uniform ORB
Mian-shu CHEN1( ),Lu-lu YU1,Xiao-ni LI1,Hong-yu ZHENG2
),Lu-lu YU1,Xiao-ni LI1,Hong-yu ZHENG2
- 1.College of Communication Engineering,Jilin University,Changchun 130022,China
2.The State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
CLC Number:
- TP391.4





| 1 | Durrant-Whyte H, Bailey T. Simultaneous localization and mapping: Part I[J]. IEEE Robotics & Automation Magazine, 2006, 13(2): 99-108. |
| 2 | Bailey T, Durrant-Whyte H. Simultaneous localization and mapping (SLAM): part Ⅱ[J]. IEEE Robotics & Automation Magazine, 2006, 13(3): 108-117. |
| 3 | Angeli A, Filliat D, Doncieux S, et al. Fast and incremental method for loop-closure detection using bags of visual words[J]. IEEE Transactions on Robotics, 2008, 24(5): 1027-1037. |
| 4 | Cummins M, Newman P. FAB-MAP: probabilistic localization and mapping in the space of appearance[J]. International Journal of Robotics Research, 2008, 27(6): 647-665. |
| 5 | Cummins M, Newman P. Appearance-only SLAM at large scale with FAB-MAP 2.0[J]. International Journal of Robotics Research, 2011, 30(9): 1100-1123. |
| 6 | 梁志伟, 陈燕燕, 朱松豪, 等. 基于视觉词典的单目视觉闭环检测算法[J]. 模式识别与人工智能, 2013, 26(6): 561-570. |
| Liang Zhi-Wei, Chen Yan-Yan, Zhu Song-Hao, et al. Loop closure detection algorithm based on monocular vision using visual dictionary[J]. Pattern Recognition and Artificial Intelligence, 2013, 26(6): 561-570. | |
| 7 | Zhang H, Liu Y L, Tan J D. Loop closing detection in RGB-D SLAM combining appearance and geometric constraints[J]. Sensors, 2015, 15(6): 14639-14660. |
| 8 | Oliva A, Torralba A. Modeling the shape of the scene: a holistic representation of the spatial envelope[J]. International Journal of Computer Vision, 2001, 42(3): 145-175. |
| 9 | Yang L, Hong Z. Visual loop closure detection with a compact image descriptor[C]∥2012 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vilamoura, Portugal, 2012: No. 13195481. |
| 10 | Yang Z, Pan Y, Deng L, et al. PLSAV: Parallel loop searching and verifying for loop closure detection[J]. IET Intelligent Transport Systems, 2021, 15(5): 683-698. |
| 11 | Bai D D, Wang C Q, Zhang B, et al. CNN feature boosted SeqSLAM for real-time loop closure detection[J]. Chinese Journal of Electronics, 2018, 27(3): 488-499. |
| 12 | Wang Z, Peng Z, Guan Y, et al. Two-stage vSLAM loop closure detection based on sequence node matching and semi-semantic autoencoder[J]. Journal of Intelligent & Robotic Systems, 2021, 101(2): 1-21. |
| 13 | Mukherjee A, Chakraborty S, Saha S K. Detection of loop closure in SLAM: a DeconvNet based approach[J]. Applied Soft Computing Journal, 2019, 80: 650-656. |
| 14 | Liu Qiang, Duan Fu-hai. Loop closure detection using CNN words[J]. Intelligent Service Robotics, 2019, 12(4): 303-318. |
| 15 | Rublee E, Rabaud V, Konolige K, et al. ORB: an efficient alternative to SIFT or SURF[C]∥Proceedings of the IEEE International Conference on Computer Vision, Barcelona, Spain, 2012: 2564-2571. |
| 16 | Rosten E, Drummond T. Machine learning for high-speed corner detection[C]∥Computer Vision-ECCV 2006: Part I, Berlin, Germany, 2006: 430-443. |
| 17 | 于录录. 视觉SLAM中回环检测算法的研究[D]. 长春: 吉林大学通信工程学院, 2021. |
| Yu Lu-lu. Research on loop detection in visual SLAM[D]. Changchun: College of Communication Engineering, Jilin University, 2021. | |
| 18 | Quigley M, Conley K, Gerkey B, et al. Ros: an open-source robot operating system[J/OL]. [2021-03-22]. |
| 19 | Engel J, Koltun V, Cremers D. Direct sparse odometry[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018, 40(3): 611-625. |
| 20 | Mur-Artal R, Montiel J M M, Tardos J D. ORB-SLAM: a versatile and accurate monocular SLAM system[J]. IEEE Transactions on Robotics, 2015, 31(5): 1147-1163. |
| 21 | Arun K S, Huang T S, Blostein S D. Least-squares fitting of two 3-D point sets[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1987, 9(5): 698-700. |
| 22 | Horn B K P. Closed-form solution of absolute orientation using unit quaternions[J]. Journal of the Optical Society of America A, 1987, 4(4): 629-642. |
| 23 | Engel J, Usenko V, Cremers D. A photometrically calibrated benchmark for monocular visual odometry[J/OL]. [2021-03-25]. |
| [1] | Yu-ting SU,Ji WANG,Wei ZHAO,Pei-guang JING. Dynamic graph convolutional neural network for image sentiment distribution prediction [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(9): 2601-2610. |
| [2] | Qiang GUO,Guo-hui ZHU,Wan-chen LI. TDOA/FDOA localization based on chaotic sparrow search algorithm [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(2): 593-600. |
| [3] | Hou⁃jie LI,Fa⁃sheng WANG,Jian⁃jun HE,Yu ZHOU,Wei LI,Yu⁃xuan DOU. Pseudo sample regularization Faster R⁃CNN for traffic sign detection [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(4): 1251-1260. |
| [4] | Hua-wei JIANG,Zhen YANG,Xin ZHANG,Qian-lin DONG. Research progress of image dehazing algorithms [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(4): 1169-1181. |
| [5] | De-xing WANG,Ruo-you WU,Hong-chun YUAN,Peng GONG,Yue WANG. Underwater image restoration based on multi-scale attention fusion and convolutional neural network [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(4): 1396-1404. |
| [6] | Jing JIN,Jian-wu DANG,Yang-ping WANG,Dong SHEN. Multi⁃cue particle filter tracking based on fuzzy statistical texture features [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(3): 1111-1120. |
| [7] | Guo-hua LIU,Wen-bin ZHOU. Pulse wave signal classification algorithm based on time⁃frequency domain feature aliasing using convolutional neural network [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1818-1825. |
| [8] | Ke-yan WANG,Di WANG,Xi ZHAO,Jing-yi CHEN,Yun-song LI. Image dehazing based on joint estimation via convolutional neural network [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1771-1777. |
| [9] | Zai-feng SHI,Jin-zhuo LI,Qing-jie CAO,Hui-long LI,Qi-xing HU. Low⁃dose spectral computer⁃tomography imaging denoising method via a generative adversarial network [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1755-1764. |
| [10] | Hua CHEN,Wei GUO,Jing-wen YAN,Wen-hao ZHUO,Liang-bin WU. A new deep learning method for roads recognition from SAR images [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(5): 1778-1787. |
| [11] | Wei ZHANG,Yong HAN,Ming JIN,Xiao-lin QIAO. Toeplitz matrices reconstruction based DOA estimation for coherent signals [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 703-710. |
| [12] | Yan-fen CHENG,Li-juan YAO,Qiao YUAN,Xian-qiao CHEN. Clearing strategy of underwater video image [J]. Journal of Jilin University(Engineering and Technology Edition), 2020, 50(2): 668-677. |
| [13] | Xiao-hui YU,Zhi-cheng ZHANG,Xin-bo LI,Xiao-dong SUN. Parameter estimation of exponentially damped sinusoidsbased on state⁃space model [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(6): 2083-2088. |
| [14] | Fu LIU, Mei-jing QUAN, Ke WANG, Yun LIU, Bing KANG, Zhi-wu HAN, Tao HOU. Indoor positioning method based on location fingerprinting of imitating mechanism of scorpion vibration source [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(6): 2076-2082. |
| [15] | Zi-ji MA,Hao LU,Yan-ru DONG. Dual path convolutional neural network forsingle image super⁃resolution [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(6): 2089-2097. |
|