Journal of Jilin University(Engineering and Technology Edition) ›› 2023, Vol. 53 ›› Issue (12): 3558-3564.doi: 10.13229/j.cnki.jdxbgxb.20221013
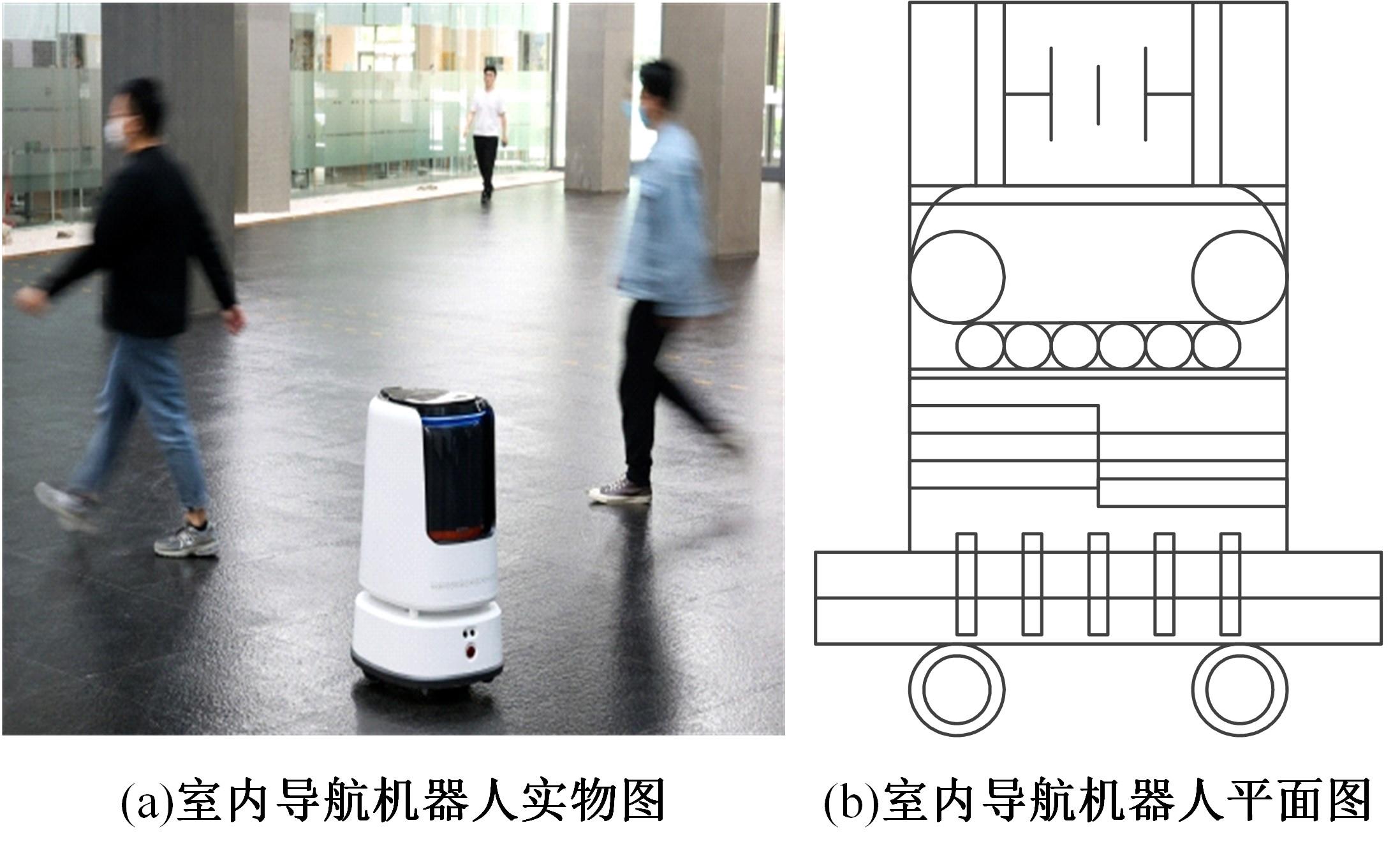
Obstacle avoidance planning algorithm for indoor navigation robot based on deep learning
Chun-hui LIU( ),Si-chang WANG,Ce ZHENG,Xiu-lian CHEN,Chun-lei HAO
),Si-chang WANG,Ce ZHENG,Xiu-lian CHEN,Chun-lei HAO
- College of Electrical Engineering and Automation,Shandong University of Science and Technology,Qingdao 266590,China
CLC Number:
- TP242




| 1 | 华英杰, 王艳, 纪志成. 基于无轨导航的室内机器人路径规划及实现[J]. 扬州大学学报: 自然科学版, 2020, 23(6): 34-38. |
| Hua Ying-jie, Wang Yan, Ji Zhi-cheng. Path planning and implementation of indoor robot based on trackless navigation[J]. Journal of Yangzhou University (Natural Science Edition), 2020,23(6): 34-38. | |
| 2 | 万俊, 姚佳烽, 余亮, 等. 基于伪距离的冗余机器人避障算法[J].机械工程学报, 2020, 56(17): 59-70. |
| Wan Jun, Yao Jia-feng, Yu Liang, et al. Obstacle avoidance algorithm for redundant manipulators based on pseudo-distance method[J]. Journal of Mechanical Engineering, 2020, 56(17): 59-70. | |
| 3 | 孙立香, 孙晓娴, 刘成菊, 等. 人群环境中基于深度强化学习的移动机器人避障算法[J]. 信息与控制, 2022, 51(1): 107-118. |
| Sun Li-xiang, Sun Xiao-xian, Liu Cheng-ju, et al. Obstacle avoidance algorithm for mobile robot based on deep reinforcement learning in crowd environment[J]. Information and Control, 2022, 51(1): 107-118. | |
| 4 | 卞永明, 季鹏成, 周怡和,等. 基于改进型DWA的移动机器人避障路径规划[J].中国工程机械学报, 2021, 19(1): 44-49. |
| Bian Yong-ming, Ji Peng-cheng, Zhou Yi-he, et al. Obstacle avoidance path planning of mobile robot based on improved DWA[J]. Chinese Journal of Construction Machinery, 2021, 19(1): 44-49. | |
| 5 | 孙顺远, 于敬源. 一种针对异构设备和环境变化的室内定位算法[J].吉林大学学报: 理学版, 2023, 61(4): 915-921. |
| Sun Shun-yuan, Yu Jing-yuan. An indoor location algorithm for heterogeneous devices and environmental changes[J]. Journal of Jilin University (Science Edition), 2023, 61(4): 915-921. | |
| 6 | 王闯, 屠晓伟. 基于三线阵CCD的室内导航方法研究[J].燕山大学学报,2021,45(4):312-320, 327. |
| Wang Chuang, Tu Xiao-wei. Research on indoor navigation method based on three linear CCDs[J]. Journal of Yanshan University, 2021, 45(4): 312-320, 327. | |
| 7 | 吴东明, 王丽娟. 采摘机器人避障控制系统研究——基于ARM+DSP和视觉传感器[J]. 农机化研究, 2020, 42(4): 218-222. |
| Wu Dong-ming, Wang Li-juan. Research on obstacle avoidance control system of picking robot-based on ARM+DSP and visual sensor[J]. Journal of Agricultural Mechanization Research, 2020, 42(4): 218-222. | |
| 8 | 张香竹, 张立家, 宋逸凡, 等. 基于深度学习的无人机单目视觉避障算法[J].华南理工大学学报: 自然科学版, 2022,50(1): 101-108, 131. |
| Zhang Xiang-zhu, Zhang Li-jia, Song Yi-fan, et al. Obstacle avoidance algorithm for unmanned aerial vehicle vision based on deep learning[J]. Journal of South China University of Technology (Natural Science Edition), 2022, 50(1): 101-108, 131. | |
| 9 | 揭吁菡, 熊丽婷. 机器人视觉导航传感器光栅投射误差校正仿真[J]. 计算机仿真, 2021, 38(9): 381-385. |
| Xu-han Jie, Xiong Li-ting. Simulation of grating projection error correction of robot vision navigation sensor[J]. Computer Simulation, 2021, 38(9): 381-385. | |
| 10 | 李晓峰, 任杰, 李东. 基于深度强化学习的移动机器人视觉图像分级匹配算法[J]. 吉林大学学报: 理学版, 2023, 61(1): 127-135. |
| Li Xiao-feng, Ren Jie, Li Dong. Hierarchical matching algorithm of visual image for mobile robots based on deep reinforcement learning[J]. Journal of Jilin University (Science Edition), 2023, 61(1): 127-135. |
| [1] | Guang HUO,Da-wei LIN,Yuan-ning LIU,Xiao-dong ZHU,Meng YUAN,Di GAI. Lightweight iris segmentation model based on multiscale feature and attention mechanism [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(9): 2591-2600. |
| [2] | Xiao-jun JIN,Yan-xia SUN,Jia-lin YU,Yong CHEN. Weed recognition in vegetable at seedling stage based on deep learning and image processing [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(8): 2421-2429. |
| [3] | Qing-tian GENG,Zhi LIU,Qing-liang LI,Fan-hua YU,Xiao-ning LI. Prediction of soil moisture based on a deep learning model [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(8): 2430-2436. |
| [4] | Wei-tiao WU,Kun ZENG,Wei ZHOU,Peng LI,Wen-zhou JIN. Deep learning method for bus passenger flow prediction based on multi-source data and surrogate-based optimization [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(7): 2001-2015. |
| [5] | Jian LI,Qi XIONG,Ya-ting HU,Kong-yu LIU. Chinese named entity recognition method based on Transformer and hidden Markov model [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(5): 1427-1434. |
| [6] | Zhen-hai ZHANG,Kun JI,Jian-wu DANG. Crack identification method for bridge based on BCEM model [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(5): 1418-1426. |
| [7] | Fei WU,Hao-ye NONG,Chen-hao MA. Tool wear prediction method based on particle swarm optimizationlong and short time memory model [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(4): 989-997. |
| [8] | Wen-li JI,Zhong TIAN,Jing CHAI,Ding-ding ZHANG,Bin WANG. Prediction of water⁃flowing height in fractured zone based on distributed optical fiber and multi⁃attribute fusion [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(4): 1200-1210. |
| [9] | Ke HE,Hai-tao DING,Xuan-qi LAI,Nan XU,Kong-hui GUO. Wheel odometry error prediction model based on transformer [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(3): 653-662. |
| [10] | Xiao-qi LYU,Hao LI,Yu GU. Adaptive blur and deduplication algorithm for digital media image based on wavelet domain [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(11): 3201-3206. |
| [11] | Jun WANG,Hua-lin WANG,Bo-wen HUANG,Qiang FU,Jun LIU. Intrusion detection for industrial internet of things based on federated learning and self-attention [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(11): 3229-3237. |
| [12] | Shu-yang SUN,Wei-bin CHENG,Hao-zhen ZHANG,Xiang-ping DENG,Hong QI. Deep-learning-based two-stage approach for real-time explicit topology optimization [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(10): 2942-2951. |
| [13] | You QU,Wen-hui LI. Multiple object tracking method based on multi-task joint learning [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(10): 2932-2941. |
| [14] | Jin-wu GAO,Zhi-huan JIA,Xiang-yang WANG,Hao XING. Degradation trend prediction of proton exchange membrane fuel cell based on PSO⁃LSTM [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(9): 2192-2202. |
| [15] | Xuan-jing SHEN,Xue-feng ZHANG,Yu WANG,Yu-bo JIN. Multi⁃focus image fusion algorithm based on pixel⁃level convolutional neural network [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(8): 1857-1864. |
|
||