Journal of Jilin University(Engineering and Technology Edition) ›› 2024, Vol. 54 ›› Issue (9): 2687-2696.doi: 10.13229/j.cnki.jdxbgxb.20221401
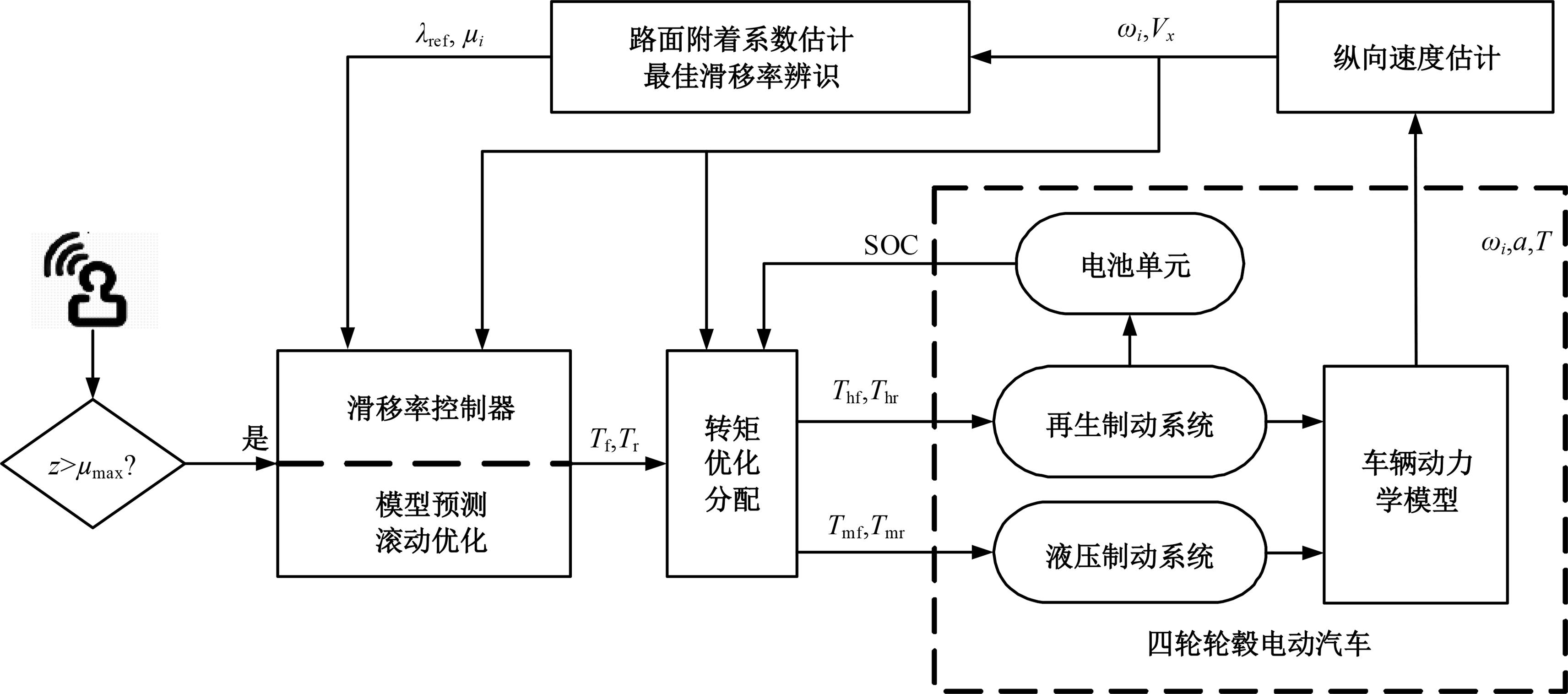
Slip rate control method based on model predictive control
Shou-tao LI1,2( ),Lu YANG2,Ru-yi QU2,Peng-peng SUN2,Ding-li YU3
),Lu YANG2,Ru-yi QU2,Peng-peng SUN2,Ding-li YU3
- 1.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun 130022,China
2.College of Communication Engineering,Jilin University,Changchun 130022,China
3.School of Engineering and Technology,Liverpool John Moores University,Liverpool L33AF,UK
CLC Number:
- TP273





| 1 | 柴凤, 于雁磊, 裴宇龙. 电传动车辆永磁轮毂电机技术现状及展望[J]. 兵工学报, 2021, 42(10): 2060-2074. |
| Chai Feng, Yu Yan-lei, Pei Yu-long. State-of-the-art technology and prospects of permanent magnet in-wheel motors for electric drive vehicles[J]. Acta Armamentarii, 2021, 42(10): 2060-2074. | |
| 2 | Chere J E, Radac M B, Szedlak-Stinean A I. Sliding mode control algorithms for anti-lock braking systems with performance comparisons[J]. Algorithms, 2020, 14(1): No.2. |
| 3 | Dash B K, Subud H B. A fuzzy adaptive sliding mode slip ratio controller of a HEV[C]∥2013 IEEE International Conference on Fuzzy Systems (FUZZ-IEEE), Hyderabad, India, 2013: 1-8. |
| 4 | Mokarram M, Khoei A, Hadidi K. A fuzzy Anti-lock braking system (ABS) controller using CMOS circuits[J]. Microprocessors and Microsystems, 2019, 70: 47-52. |
| 5 | Zhang J, Kong D, Chen L, et al. Optimization of control strategy for regenerative braking of an electrified bus equipped with an anti-lock braking system[J]. Proceedings of the Institution of Mechanical Engineers Part D Journal of Automobile Engineering, 2012, 226(4): 494-506. |
| 6 | 苑磊, 何仁. 基于线性自抗扰控制的汽车ABS滑移率控制研究[J]. 汽车工程, 2021, 43(9): 1367-1374, 1393. |
| Yuan Lei, He Ren. Research on ABS slip ratio control of vehicle based on linear active disturbance rejection control[J]. Automotive Engineering, 2021, 43(9): 1367-1374, 1393. | |
| 7 | Wang B, Huang X, Wang J, et al. A robust wheel slip ratio control design combining hydraulic and regenerative braking systems for in-wheel-motors-driven electric vehicles[J]. Journal of the Franklin Institute, 2015, 352(2): 577-602. |
| 8 | 郭兆松, 吴士力, 文爱民. 纯电动汽车机电复合制动的模型预测分配策略[J]. 机械设计与制造, 2020(7): 156-160. |
| Guo Zhao-song, Wu Shi-li, Wen Ai-min. Electrical vehicle electro-mechanical hybrid Braking torques distribution strategy based on model predicting control[J]. Machinery Design & Manufacture, 2020(7): 156-160. | |
| 9 | 刘刚, 靳立强, 陈鹏飞. 复杂工况下基于最佳滑移率的汽车牵引力控制算法[J]. 吉林大学学报: 工学版, 2016, 46(5): 1391-1398. |
| Liu Gang, Jin Li-chang, Chen Peng-fei. Vehicle traction control algorithm based on optimal slip ratio under complicated road conditions[J]. Journal of Jilin University (Engineering and Technology Edition), 2016, 46(5): 1391-1398. | |
| 10 | Yuan L, Zhao H, Chen H, et al. Nonlinear MPC-based slip control for electric vehicles with vehicle safety constraints[J]. Mechatronics, 2016, 38: 1-15. |
| 11 | 丁辉. 混合动力汽车制动协调及稳定性控制策略研究[D]. 长春: 吉林大学通信工程学院, 2017. |
| Ding Hui. Research on braking coordination and stability control strategy of hybrid electric vehicle[D]. Changchun: College of Communications Engineering, Jilin University, 2017. | |
| 12 | Liang K, Tu Q Z, Xin M, et al. An improved LuGre model for calculating static steering torque of rubber tracked chassis[J]. Defence Technology, 2022, 18(5): 797-810. |
| 13 | Zhang J, Sun W, Jing H. Nonlinear robust control of antilock braking systems assisted by active suspensions for automobile[J]. IEEE Transactions on Control Systems Technology, 2018, 27(3): 1352-1359. |
| 14 | Khodaparast J, Khederzadeh M. Least square and kalman based methods for dynamic phasor estimation: a review[J]. Protection and Control of Modern Power Systems, 2017, 2(1): 1-18. |
| [1] | Liang WU,Yi-fan GU,Biao XING,Fang-wu MA,Li-wei NI,Wei-wei JIA. Steering four-wheel distributed integrated control method based on LQR [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(9): 2414-2422. |
| [2] | Yu-hai WANG,Xiao-zhi LI,Xing-kun LI. Predictive energy saving algorithm for hybrid electric truck under high-speed condition [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(8): 2121-2129. |
| [3] | Sheng CHANG,Hong-fei LIU,Nai-wei ZOU. H∞ loop shaping robust control of vehicle tracking on variable curvature curve [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(8): 2141-2148. |
| [4] | Jian-ze LIU,Jiang LIU,Min LI,Xin-jie ZHANG. Vehicle speed decoupling road identification method based on least squares [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(7): 1821-1830. |
| [5] | Xian-yi XIE,Ming-jun ZHANG,Li-sheng JIN,Bin ZHOU,Tao HU,Yu-fei BAI. Artificial bee colony trajectory planning algorithm for intelligent vehicles considering comfortable [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(6): 1570-1581. |
| [6] | Ling HUANG,Zuan CUI,Feng YOU,Pei-xin HONG,Hao-chuan ZHONG,Yi-xuan ZENG. Vehicle trajectory prediction model for multi-vehicle interaction scenario [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(5): 1188-1195. |
| [7] | Hong-yan GUO,Lian-bing WANG,Xu ZHAO,Qi-kun DAI. Joint estimation of vehicle mass and road slope considering lateral motion [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(5): 1175-1187. |
| [8] | Yu-kai LU,Shuai-ke YUAN,Shu-sheng XIONG,Shao-peng ZHU,Ning ZHANG. High precision detection system for automotive paint defects [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(5): 1205-1213. |
| [9] | Shao-hua WANG,Qi-rui ZHANG,De-hua SHI,Chun-fang YIN,Chun LI. Analysis of nonlinear vibration response characteristics of hybrid transmission system with dual-planetary gear sets [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(4): 890-901. |
| [10] | Xue-jing DU,Ning WANG,Jie ZHANG,Yu-long PEI. Control strategy of lateral stability of semi-trailer train in dangerous section of cold area [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(4): 996-1006. |
| [11] | Jing-hua ZHAO,Yu-tong ZHANG,Pai CAO,Zhong-shu WANG,Xiao-ping LI,Ya-nan SUN,Fang-xi XIE. Optimal energy management on extended⁃range electric vehicle equipped with compressed natural gas engine [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(3): 600-609. |
| [12] | Zhen-hai GAO,Rong-gui CAI,Tian-jun SUN,Tong YU,Hao-yuan ZHAO,Hao BAN. Data⁃filtering method for driving behavior based on vehicle shared autonomy [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(3): 589-599. |
| [13] | Xian-yi XIE,Yu-han WANG,Li-sheng JIN,Xin ZHAO,Bai-cang GUO,Ya-ping LIAO,Bin ZHOU,Ke-qiang LI. Intelligent vehicle trajectory tracking control based on adjusting step size of control horizon [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(3): 620-630. |
| [14] | Wen-hang LI,Tao NI,Ding-xuan ZHAO,Ying-jie DENG,Xiao-bo SHI. Control method on hydraulic suspension systems of rescue vehicles based on model predictive feedback technology [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(3): 610-619. |
| [15] | Jian-jun NIE,Jun-kai HOU,Xiao-lin XIE,Hong-zhen YAN. Design and obstacle surmounting performance analysis of a novel mobile chassis for inspection robot [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(2): 356-364. |
|
||