Journal of Jilin University(Engineering and Technology Edition) ›› 2024, Vol. 54 ›› Issue (9): 2414-2422.doi: 10.13229/j.cnki.jdxbgxb.20221440
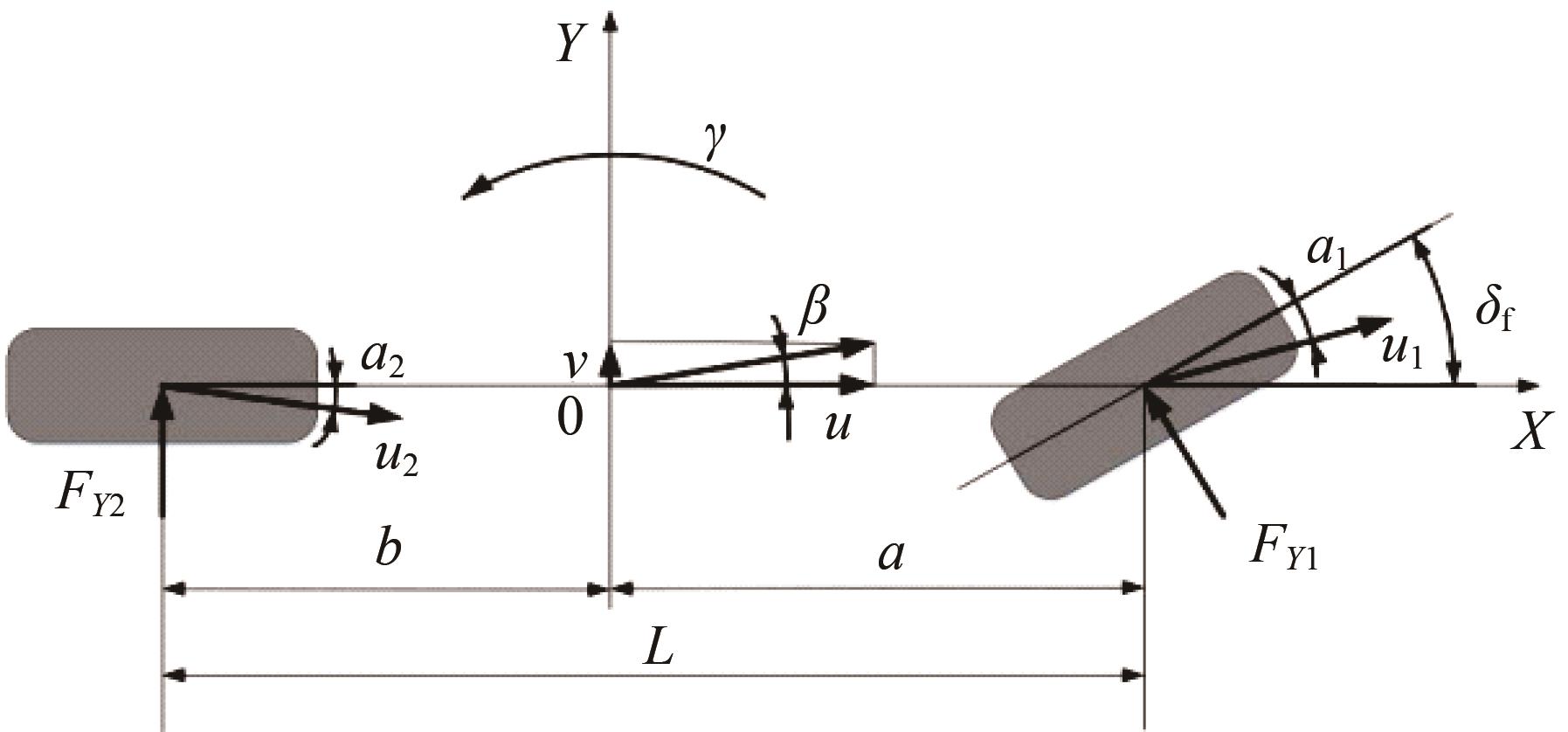
Steering four-wheel distributed integrated control method based on LQR
Liang WU1( ),Yi-fan GU1,Biao XING1,Fang-wu MA1,Li-wei NI1,2,Wei-wei JIA3()
),Yi-fan GU1,Biao XING1,Fang-wu MA1,Li-wei NI1,2,Wei-wei JIA3()
- 1.National Key Laboratory of Automotive Chassis Integration and Bionics,Jilin University,Changchun 130022,China
2.School of Mechanical Engineering,Henan Institute of Engineering,Zhengzhou 451191,China
3.School of Management Science and Information Engineering,Jilin University of Finance and Economics,Changchun 130117,China
CLC Number:
- U461.6












| 1 | 罗剑. 分布式电驱动车辆制/驱动力协调及主动容错控制[D]. 北京: 清华大学机械工程学院, 2014. |
| Luo Jian. Distributed electric vehicle system/driving force coordination and active fault tolerant control[D]. Beijing:School of Mechanical Engineering, Tsinghua University,2014. | |
| 2 | Wang Z, Zhu J, Zhang L, et al. Automotive ABS/DYC coordinated control under complex driving conditions[J]. IEEE Access, 2018, 6: 32769-32779. |
| 3 | 刘颖. 电动汽车DYC系统与主动悬架系统联合控制研究[D]. 武汉:武汉科技大学汽车与交通工程学院, 2018. |
| Liu Ying. Research on joint control of electric vehicle DYC system and active suspension system[D]. Wuhan:School of Automobile and Traffic Engineering, Wuhan University of Science and Technology, 2018. | |
| 4 | 田燃. 四轮转向与直接横摆力矩控制[D]. 合肥: 合肥工业大学电气与自动化工程学院, 2018. |
| Tian Ran. Four wheel steering and direct yaw moment control[D]. Hefei:School of Electrical Engineering and Automation, Hefei University of Technology,2018. | |
| 5 | Masao N, Sachiko Y, Yutaka H. Integrated control of active rear wheel steering and yaw moment control using braking forces[J]. JSME International Journal Series C-Mechanical Systems Machine Elements and Manufacturing, 1999, 42(2): 301-308. |
| 6 | 彭文正, 敖银辉, 邹晨祺, 等. 主动后轮转向及分布式驱动车辆协同控制研究[J]. 机械科学与技术, 2020(2): 207-213. |
| Peng Wen-zheng, Ao Yin-hui, Zou Chen-qi, et al. Research on cooperative control of active rear-wheel steering and distributed drive vehicle[J].Mechanical Science and Technology,2020(2):207-213. | |
| 7 | Zhou L, Ou L L, Wang C. A simulation of the four-wheel steering vehicle stability based on dyc control[C]∥2009 International Conference on Measuring Technology and Mechatronics Automation,Zhangjiajie, China, 2009: 189-193. |
| 8 | Hang P, Chen X B, Fang S D, et al. Robust control for four-wheel-independent-steering electric vehicle with steer-by-wire system[J]. International Journal of Automotive Technology, 2017, 18(5): 785-797. |
| 9 | Hu J, Hu Z, Fu C, et al. Integrated control of AFS and DYC for in-wheel-motor electric vehicles based on operation region division[J]. International Journal of Vehicle Design, 2019,79: 221-247. |
| 10 | Kanchwala H, Trigell A S. Vehicle handling control of an electric vehicle using active torque distribution and rear wheel steering[J]. International Journal of Vehicle Design,2017, 74(4): 319-345. |
| 11 | 杜峰. 基于线控技术的四轮主动转向汽车控制策略仿真研究[D]. 西安: 长安大学汽车学院, 2009. |
| Du Feng. Simulation research on control strategy of four-wheel active steering vehicle based on wire control technology[D]. Xi'an: School of Automobile,Chang'an University, 2009. | |
| 12 | 郭烈, 葛平淑, 许林娜,等. 转向工况下的分布式电动汽车稳定性控制[J]. 华南理工大学学报: 自然科学版, 2020, 48(3): 100-107. |
| Guo Lie, Ge Ping-shu, Xu Lin-na, et al. Distributed electric vehicle stability control under steering conditions[J]. Journal of South China University of Technology (Natural Science Edition), 2020,48(3): 100-107. | |
| 13 | 聂家弘. 无人驾驶智能平台四轮转向轨迹跟踪控制研究[D]. 长春: 吉林大学车辆工程学院, 2020. |
| Nie Jia-hong. Research on four-wheel steering trajectory tracking control of unmanned intelligent platform[D]. Changchun: College of Automotive Engineering,Jilin University, 2020. |
| [1] | Yu-hai WANG,Xiao-zhi LI,Xing-kun LI. Predictive energy saving algorithm for hybrid electric truck under high-speed condition [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(8): 2121-2129. |
| [2] | Sheng CHANG,Hong-fei LIU,Nai-wei ZOU. H∞ loop shaping robust control of vehicle tracking on variable curvature curve [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(8): 2141-2148. |
| [3] | Jian-ze LIU,Jiang LIU,Min LI,Xin-jie ZHANG. Vehicle speed decoupling road identification method based on least squares [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(7): 1821-1830. |
| [4] | Xian-yi XIE,Ming-jun ZHANG,Li-sheng JIN,Bin ZHOU,Tao HU,Yu-fei BAI. Artificial bee colony trajectory planning algorithm for intelligent vehicles considering comfortable [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(6): 1570-1581. |
| [5] | Ling HUANG,Zuan CUI,Feng YOU,Pei-xin HONG,Hao-chuan ZHONG,Yi-xuan ZENG. Vehicle trajectory prediction model for multi-vehicle interaction scenario [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(5): 1188-1195. |
| [6] | Hong-yan GUO,Lian-bing WANG,Xu ZHAO,Qi-kun DAI. Joint estimation of vehicle mass and road slope considering lateral motion [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(5): 1175-1187. |
| [7] | Yu-kai LU,Shuai-ke YUAN,Shu-sheng XIONG,Shao-peng ZHU,Ning ZHANG. High precision detection system for automotive paint defects [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(5): 1205-1213. |
| [8] | Shao-hua WANG,Qi-rui ZHANG,De-hua SHI,Chun-fang YIN,Chun LI. Analysis of nonlinear vibration response characteristics of hybrid transmission system with dual-planetary gear sets [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(4): 890-901. |
| [9] | Xue-jing DU,Ning WANG,Jie ZHANG,Yu-long PEI. Control strategy of lateral stability of semi-trailer train in dangerous section of cold area [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(4): 996-1006. |
| [10] | Zhen-hai GAO,Rong-gui CAI,Tian-jun SUN,Tong YU,Hao-yuan ZHAO,Hao BAN. Data⁃filtering method for driving behavior based on vehicle shared autonomy [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(3): 589-599. |
| [11] | Xian-yi XIE,Yu-han WANG,Li-sheng JIN,Xin ZHAO,Bai-cang GUO,Ya-ping LIAO,Bin ZHOU,Ke-qiang LI. Intelligent vehicle trajectory tracking control based on adjusting step size of control horizon [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(3): 620-630. |
| [12] | Xiao-lin DENG,Fu-mo YANG,Shan-gan QIN. Comparative analysis on crashworthiness of a novel bamboo⁃like hexagonal gradient hierarchical multicellular tube [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(2): 333-345. |
| [13] | Yi-gang WANG,Yu-peng WANG,Hao ZHANG,Si-an ZHAO. Identification and analysis of aerodynamic noise sources in the bogie area of high⁃speed trains [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(2): 346-355. |
| [14] | Jian-jun NIE,Jun-kai HOU,Xiao-lin XIE,Hong-zhen YAN. Design and obstacle surmounting performance analysis of a novel mobile chassis for inspection robot [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(2): 356-364. |
| [15] | Tie WANG,Xu-dong LI,Cheng TIAN,Hong-wei ZHAO. Building biaxial fatigue damage model of wheel rims based on multi-axial loads projection theory [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(1): 99-104. |
|
||