Journal of Jilin University(Engineering and Technology Edition) ›› 2024, Vol. 54 ›› Issue (10): 3027-3036.doi: 10.13229/j.cnki.jdxbgxb.20221555
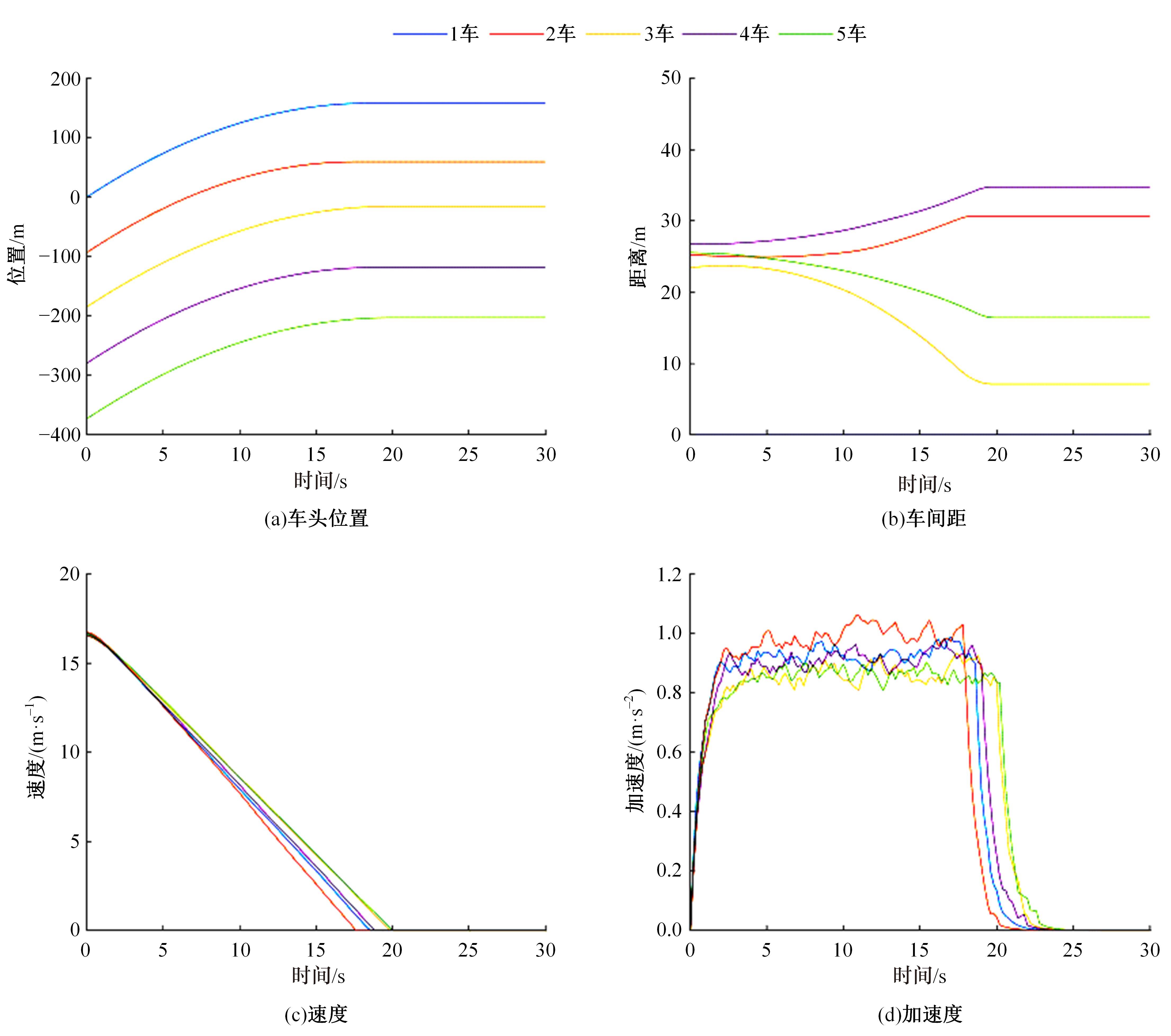
Brake control algorithm for virtually coupled trains based on multi vehicle cooperation
Lei ZHANG1( ),Zi-mu LI2,Yong-yao YAN2,Fei DOU3,Hong-jie LIU1()
),Zi-mu LI2,Yong-yao YAN2,Fei DOU3,Hong-jie LIU1()
- 1.School of Electronic and Information Engineering,Beijing Jiaotong University,Beijing 100044,China
2.Traffic Control Technology Co. ,Ltd. ,Beijing 100070,China
3.Beijing Mass Transit Railway Operation Co. ,Ltd. ,Beijing 100044,China
CLC Number:
- U284



| 1 | 禹丹丹, 韩宝明, 张琦, 等. 基于灵活虚拟编组的轨道交通列车开行方案优化方法[J]. 北京交通大学学报, 2015, 39(6): 21-31. |
| Yu Dan-dan, Han Bao-ming, Zhang Qi, et al. Optimization method for train plan of urban rail transit based on the flexible length of train formation[J]. Journal of Beijing Jiaotong University, 2015, 39(6): 21-31. | |
| 2 | 刘宏杰, 唐涛, 张艳兵, 等. 城轨虚拟编组关键性能指标及技术探讨[J]. 都市快轨交通, 2023, 36(1):28-35. |
| Liu Hong-jie, Tang Tao, Zhang Yan-bing, et al. Discussion on the key performance indicators and technologies of virtual coupling in metros[J]. Urban Rapid Rail Transit, 2023, 36(1): 28-35. | |
| 3 | Di Meo C, Di Vaio M, Flammini F, et al. ERTMS/ETCS virtual coupling: proof of concept and numerical analysis[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 21(6): 2545-2556. |
| 4 | Quaglietta E, Wang M, Goverde R M P. A multi-state train-following model for the analysis of virtual coupling railway operations[J]. Journal of Rail Transport Planning & Management, 2020, 15: No.100195. |
| 5 | Tang T, Huang Y N, Yin J T.Chinese metro train control system(CMTCS): from automatic to autonomous[J]. IRSE News, 2022, 289: 3-7. |
| 6 | Shift2Rail Joint Undertaking. Shift2Rail Annual Activity Report 2021[R]. Luxembourg: Publications Office of the European Union, 2021. |
| 7 | 谢正光, 魏运. 新时代我国城市轨道交通运营新模式探讨[J]. 都市快轨交通, 2022, 35(1): 54-59. |
| Xie Zheng-guang, Wei Yun. New modes of urban rail operations in the new era of China[J]. Urban Rapid Rail Transit, 2022, 35(1): 54-59. | |
| 8 | 魏运, 白文飞, 李宇杰.智慧地铁需求分析及功能规划研究[J].都市快轨交通, 2020, 33(1): 40-48. |
| Wei Yun, Bai Wen-fei, Li Yu-jie. Development demand and function planning of smart metro[J]. Urban Rapid Rail Transit, 2020, 33(1): 40-48. | |
| 9 | Bock U, Bikker G. Design and development of a future freight train concept-"virtually coupled train formations"[J]. IFAC Proceedings Volumes, 2000, 33(9): 395-400. |
| 10 | Ning B. Absolute braking and relative distance braking-train operation control modes in moving block systems[J]. WIT Transactions on The Built Environment, 1998, 37:991-1001. |
| 11 | 荀径, 陈明亮, 宁滨, 等. 虚拟重联条件下地铁列车追踪运行性能衡量[J]. 北京交通大学学报, 2019, 43(1): 96-103. |
| Xun Jing, Chen Ming-liang, Ning Bin, et al. Train tracking performance measurement under virtual coupling in subway[J]. Journal of Beijing Jiaotong University, 2019, 43 (1): 96-103. | |
| 12 | Zhou Q, Zhang C Y, Bao F, et al. The safety braking protection model of virtually coupled train platoon in subway[C]//2020 10th Institute of Electrical and Electronics Engineers International Conference on Cyber Technology in Automation, Control, and Intelligent Systems(CYBER), Xi'an, China, 2020:No.9278960. |
| 13 | 吴萌岭, 马天和, 田春, 等. 列车制动技术发展趋势探讨[J].中国铁道科学, 2019, 40(1): 134-144. |
| Wu Meng-ling, Ma Tian-he, Tian Chun, et al. Discussion on development trend of train braking technology[J]. China Railway Science, 2019, 40(1): 134-144. | |
| 14 | 刘豫湘, 方长征, 万建兵, 等. 列车制动系统技术现状及发展趋势[J]. 电力机车与城轨车辆, 2014,37(5): 1-4. |
| Liu Yu-xiang, Fang Chang-zheng, Wan Jian-bing, et al. Technology status and development trend of train braking system[J]. Electric Locomotives & Mass Transit Vehicles, 2014, 37(5): 1-4. | |
| 15 | Wang J, Liu H, Tang T, et al. A space-time interval based protection method for virtual coupling[C]∥2022 China Automation Congress(CAC), Xiamen, China, 2022: 4906-4911. |
| 16 | Quaglietta E. Deliverable D4.1 market potential and operational scenarios for virtual coupling[R/OL].[2019-07-29].. |
| 17 | Stickel S, Schenker M, Dittus H, et al. Technical feasibility analysis and introduction strategy of the virtually coupled train set concept[J]. Scientific Reports, 2022, 12(1): 4248. |
| 18 | 穆俊斌, 孙景辉. 某型城际动车组制动力分级控制方式[J]. 电子世界, 2014(10): 339-339. |
| Mu Jun-bin, Sun Jing-hui. Grading control mode of braking force for a certain type of intercity multiple unit[J].Electronics World, 2014(10): 339-339. | |
| 19 | 侯德藻. 汽车纵向主动避撞系统的研究[D]. 北京: 清华大学车辆与运载学院, 2004. |
| Hou De-zao. Study on vehicle forward collision avoidance system[D].Beijing:School of Vehicle and Mobility, Tsinghua University, 2004. | |
| 20 | 胡满江, 徐彪, 秦洪懋, 等. 基于MPC的多车纵向协同避撞算法[J]. 清华大学学报: 自然科学版,2017, 57(12): 1280-1286. |
| Hu Man-jiang, Xu Biao, Qin Hong-mao, et al. MPC based longitudinal coordinated collision avoidance for multiple connected vehicles[J]. Journal of Tsinghua University (Science and Technology), 2017, 57(12): 1280-1286. | |
| 21 | 张玮, 张树培, 罗崇恩, 等.智能汽车紧急工况避撞轨迹规划[J].吉林大学学报: 工学版, 2022, 52(7):1515-1523. |
| Zhang Wei, Zhang Shu-pei, Luo Chong-en, et al. Collision avoidance trajectory planning for intelligent vehicles in emergency conditions[J].Journal of Jilin University (Engineering and Technology Edition),2022, 52(7): 1515-1523. | |
| 22 | 孟柯, 吴超仲, 陈志军, 等.人车碰撞风险识别及智能车辆控制系统[J].交通信息与安全,2016,34(6):22-29. |
| Meng Ke, Wu Chao-zhong, Chen Zhi-jun, et al. A system for risk identification of pedestrain-vehicular collisions and intelligent control[J]. Journal of Transport Information and Safety, 2016, 34(6): 22-29. | |
| 23 | Funke J, Brown M, Erlien S M, et al. Collision avoidance and stabilization for autonomous vehicles in emergency scenarios[J]. IEEE Transactions on Control Systems Technology, 2016, 25(4): 1204-1216. |
| [1] | Na ZHANG,Feng CHEN,Jian-po WANG,Ya-di ZHU. Recognition of travel patterns for urban rail transit passengers based on spatiotemporal sequence similarity [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(9): 2588-2599. |
| [2] | Bo-song FAN,Chun-fu SHAO. Urban rail transit emergency risk level identification method [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(2): 427-435. |
| [3] | Jing WANG,Feng WAN,Chun-jiao DONG,Chun-fu SHAO. Modelling on catchment area and attraction intensity of urban rail transit stations [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(2): 439-447. |
| [4] | Qing-yong WANG,Wei-qiang QU. Optimization algorithm of urban rail transit operation scheduling based on linear programming [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(12): 3446-3451. |
| [5] | ZHAO Xue-yu, YANG Jia-qi, PENG Ya-mei. Competitive and cooperative relationship evolution mechanism between urban rail transit and traditional bus [J]. 吉林大学学报(工学版), 2017, 47(3): 756-764. |
| [6] | YAO Xiang-ming, ZHAO Peng, YU Dan-dan. Dynamic origin-destination matrix estimation for urban rail transit based on averaging strategy [J]. 吉林大学学报(工学版), 2016, 46(1): 92-99. |
| [7] | CAO Yang, ZHAO Shu-zhi, TIAN Qing-fei. Urban rail transit subsidy policy based on maximum welfare [J]. , 2012, (03): 618-622. |
| [8] | ZHAO Shu-zhi, CAO Yang, TIAN Qing-fei. Urban rail transit scheduling decision based on information fusion [J]. 吉林大学学报(工学版), 2011, 41(增刊1): 85-88. |
| [9] | CAO Shou-hua,YUAN Zhen-zhou,ZHAO Dan. Queuing mechanism of passengers at exit stairs of urban rail transit [J]. 吉林大学学报(工学版), 2009, 39(06): 1463-1468. |
| [10] | Yang Li-ya;Shao Chun-fu . Integrated forecasting model for real estate price along urban rail transit based on BP neural network and Markov chain [J]. 吉林大学学报(工学版), 2008, 38(03): 514-0519. |
| [11] |
Zhao Jian,Li Jing,Song Da-feng,Zhang Jia-cai,Li You-de .
Brake control algorithm of traction control system based on wheel acceleration threshold [J]. 吉林大学学报(工学版), 2007, 37(02): 263-0268. |
|
||