Journal of Jilin University(Engineering and Technology Edition) ›› 2025, Vol. 55 ›› Issue (12): 3852-3861.doi: 10.13229/j.cnki.jdxbgxb.20240361
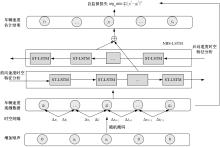
Vehicle travel speed estimation based on self⁃supervised long short⁃term memory network under single global navigation satellite system signal
Jing TIAN( ),She-qiang MA(),Dan ZHAO,Fa-cheng CHEN
),She-qiang MA(),Dan ZHAO,Fa-cheng CHEN
- School of Transportation Management,People's Public Security University of China,Beijing 100038,China
CLC Number:
- U149.41






| [1] | 闵海根, 方煜坤, 吴霞, 等. 弱GNSS信号下基于EMD和LSTM的车辆位置预测方法研究[J]. 中国公路学报, 2021, 34(7): 128-139. |
| Min Hai-gen, Fang Yu-kun, Wu Xia, et al. Position prediction based on empirical mode decomposition and long short-term memory under global navigation satellite system outages[J]. China Journal of Highway and Transport, 2021, 34(7): 128-139. | |
| [2] | Shen C, Zhang Y, Tang J, et al. Dual-optimization for a MEMS-INS/GPS system during GPS outages based on the cubature Kalman filter and neural networks[J]. Mechnical Systems and Signal Processing, 2019, 133:No. 106222. |
| [3] | Yao Y Q, Xu X S, Zhu C C, et al. A hybrid fusion algorithm for GPS/INS integration during GPS outages[J]. Measurement, 2017, 103: 42-51. |
| [4] | Lehtinen J, Munkberg J, Hasselgren J, et al. Noise2Noise: learning image restoration without clean data[C]∥International Conference on Machine Learning, Stockholm, Sweden, 2018: 2965-2974. |
| [5] | Moran N, Dan S, Yu Z, et al. Noisier2Noise: learning to denoise from unpaired noisy data[C]∥IEEE Conference on Computer Vision and Pattern Recognition, Seattle, USA,2020: 12061-12069. |
| [6] | Krull A, Buchholz T O, Jug F. Noise2Void-Learning denoising from single noisy images[C]∥IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, USA, 2019: 2124-2132. |
| [7] | 刘雪梅, 程彭圣男, 李海瑞, 等.基于字词向量的BiLSTM-CRF水利工程巡检文本实体识别模型[J]. 华北水利水电大学学报: 自然科学版, 2023(3): 9-17. |
| Liu Xue-mei, Sheng-nan Chengpeng, Li Hai-rui, et al. Research on text entity recognition for water project inspection based on word-character vector BiLSTM-CRF[J]. Journal of North China University of Water Resources and Electric Power, 2023(3): 9-17. | |
| [8] | 崔丽霞, 许利显. 基于Bi LSTM-CTC的语音识别系统研究[J].自动化与仪器仪表, 2023 (10): 90-94. |
| Cui Li-xia, Xu Li-xian. Research on speech recognition system based on BiLSTM-CTC[J]. Automation & Instrumentation, 2023 (10):90-94. | |
| [9] | 苏兆品, 张羚, 张国富, 等. 基于多特征融合和BiLSTM的语音隐写检测算法[J]. 电子学报, 2023, 51(5): 1300-1309. |
| Su Zhao-pin, Zhang Ling, Zhang Guo-fu, et al. A speech steganalysis algorithm based on multi-feature fusion and BiLSTM[J]. Acta Electronica Sinica, 2023, 51(5): 1300-1309. | |
| [10] | 付翔, 肖帅, 徐超. 轮毂电动机驱动车辆并联式复合制动策略[J]. 江苏大学学报: 自然科学版, 2025, 46(1): 9-17. |
| Fu Xiang, Xiao Shuai, Xu Chao. Parallel compound braking strategy of vehicle driven by wheel motor[J]. Journal of Jiangsu University(Natural Science Edition), 2025, 46(1): 9-17. | |
| [11] | Guo S, Yan Z F, Zhang K, et al. Toward convolutional blind denoising of real photographs[C]∥IEEE Conference on Computer Vision and Pattern Recognition, Long Beach, USA, 2019: 1712-1722. |
| [12] | He K M, Chen X L, Xie S N, et al. Masked autoencoders are scalable vision learners[C]∥IEEE Conference on Computer Vision and Pattern Recognition, New Orleans,USA,2022: 15979-15988. |
| [13] | Cui Z Y, Ke R M, Pu Z Y, et al. Stacked bidirectional and unidirectional LSTM recurrent neural network for forecasting network-wide traffic state with missing values[J]. Transportation Research Part C: Emerging Technologies, 2020, 118(9): No.102674. |
| [14] | Lv Y S, Duan Y J, Kang W W, et al. Traffic flow prediction with big data: a deep learning approach[J]. IEEE Transactions Intelligent Transportation Systems, 2015, 16(2): 865-873. |
| [15] | Do L N N, Vu H L, Vo B Q, et al. An effective spatial-temporal attention based neural network for traffic flow prediction[J]. Transportation Research Part C: Emerging Technologies, 2019(108): 12-28. |
| [16] | 贾现广, 冯超琴, 苏治文, 等.城市交通网格集群的Bi-LSTM的流量预测[J]. 重庆大学学报, 2023, 46(9): 130-141. |
| Jia Xian-guang, Feng Chao-qin, Su Zhi-wen, et al. Forecasting for urban traffic grid clusters based on Bi-LSTM[J]. Jounal of Chongqing University, 2023, 46(9):130-141. | |
| [17] | Graves A, Jaitly N, Mohamed A R. Hybrid speech recognition with deep bidirectional lstm[C]∥IEEE Workshop on Automatic Speech Recognition and Understanding, Olomouc, Czech Republic, 2013: 273-278. |
| [1] | Jing TIAN,She-qiang MA,Xian-min SONG,Dan ZHAO,Fa-cheng CHEN. Adaptive convolutional network for traffic state estimation under sparse data [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(8): 2579-2587. |
| [2] | Yue HOU,Jin-song GUO,Wei LIN,Di ZHANG,Yue WU,Xin ZHANG. Multi-view video speed extraction method that can be segmented across lane demarcation lines [J]. Journal of Jilin University(Engineering and Technology Edition), 2025, 55(5): 1692-1704. |
| [3] | Yu-hai WANG,Xiao-zhi LI,Xing-kun LI. Predictive energy saving algorithm for hybrid electric truck under high-speed condition [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(8): 2121-2129. |
| [4] | Ping YU,Kang ZHAO,Jie CAO. Rolling bearing fault diagnosis based on optimized A-BiLSTM [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(8): 2156-2166. |
| [5] | Jian-ze LIU,Jiang LIU,Min LI,Xin-jie ZHANG. Vehicle speed decoupling road identification method based on least squares [J]. Journal of Jilin University(Engineering and Technology Edition), 2024, 54(7): 1821-1830. |
| [6] | Lin BAI,Lin-jun LIU,Xuan-ang LI,Sha WU,Ru-qing LIU. Depth estimation algorithm of monocular image based on self-supervised learning [J]. Journal of Jilin University(Engineering and Technology Edition), 2023, 53(4): 1139-1145. |
| [7] | Hong-wei ZHAO,Jian-rong ZHANG,Jun-ping ZHU,Hai LI. Image classification framework based on contrastive self⁃supervised learning [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(8): 1850-1856. |
| [8] | Da-ke ZHOU,Chao ZHANG,Xin YANG. Self-supervised 3D face reconstruction based on multi-scale feature fusion and dual attention mechanism [J]. Journal of Jilin University(Engineering and Technology Edition), 2022, 52(10): 2428-2437. |
| [9] | QIAN Li-jun, HU Wei-long, LIU Qing, WU Bing. Multiple segment method for automatic parking path planning and its key technology [J]. 吉林大学学报(工学版), 2016, 46(3): 785-791. |
|
||