Journal of Jilin University(Engineering and Technology Edition) ›› 2021, Vol. 51 ›› Issue (5): 1651-1663.doi: 10.13229/j.cnki.jdxbgxb20200401
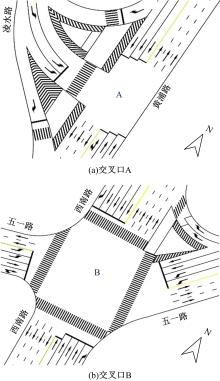
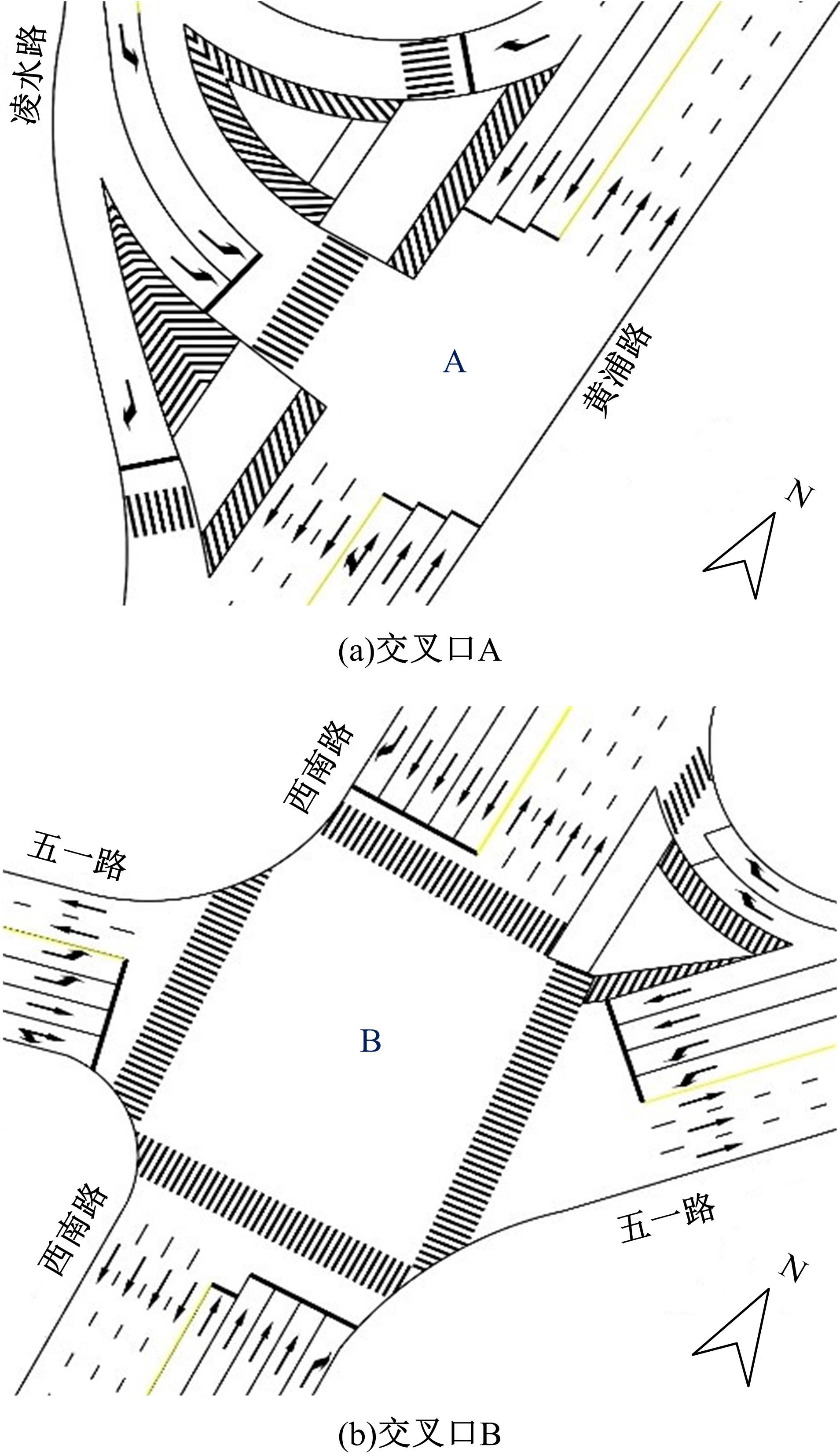
Settings of guiding markings for left⁃turning vehicles based on lane selection and vehicle trajectory
Rong-han YAO1( ),Wen-yan QI1,Liu-jie ZHENG1,Da-yi QU1,2()
),Wen-yan QI1,Liu-jie ZHENG1,Da-yi QU1,2()
- 1.School of Transportation and Logistics,Dalian University of Technology,Dalian 116024,China
2.School of Mechanical & Automotive Engineering,Qingdao University of Technology,Qingdao 266520,China
CLC Number:
- U491


| 1 | Gipps P G. A model for the structure of lane-changing decisions [J]. Transportation Research Part B: Methodological, 1986, 20(5): 403-414. |
| 2 | Nevers B L, Rouphail N M. Field evaluation of lane selection strategies at signalized intersections[J]. Journal of Transportation Engineering, 2002, 128(3): 224-231. |
| 3 | Toledo T, Koutsopoulos H N, Ben-Akiva M. Integrated driving behavior modeling[J]. Transportation Research Part C: Emerging Technologies, 2007, 15(2): 96-112. |
| 4 | 徐慧智, 程国柱, 裴玉龙. 车道变换行为对道路通行能力影响的研究[J]. 中国科技论文在线, 2010, 5(10): 749-753. |
| Xu Hui-zhi, Cheng Guo-zhu, Pei Yu-long. Study on effect of lane-changing behavioral characteristic to capacity[J]. Sciencepaper Online, 2010, 5(10): 749-753. | |
| 5 | 李志慧, 汪昆维, 宋现敏, 等. 基于车道选择特性的环形交叉口行程时间预测[J]. 吉林大学学报: 工学版, 2017, 47(5): 1411-1419. |
| Li Zhi-hui, Wang Kun-wei, Song Xian-min, et al. Roundabout travel time prediction based on characteristics of lane choosing[J]. Journal of Jilin University(Engineering and Technology Edition), 2017, 47(5): 1411-1419. | |
| 6 | 周红媚, 孙叶, 徐秀娟. 基于随机效用理论的城市道路车辆自由换道行为研究[J]. 交通运输研究, 2017, 3(2): 9-16. |
| Zhou Hong-mei, Sun Ye, Xu Xiu-juan. Behavior of discretionary lane changing on urban streets based on random utility theory[J]. Transport Research, 2017, 3(2): 9-16. | |
| 7 | Sando T, Ren M. Influence of intersection geometrics on the operation of triple left-turn lanes[J]. Journal of Transportation Engineering, 2009, 135(5): 253-259. |
| 8 | Yun M, Ji J, Chen Z. Lane change behavior at weaving section of signalized intersection upstream[C]∥Proceedings of the Fourth International Conference on Transportation Engineering. Reston VA: American Society of Civil Engineers. 2013: 1229-1234. |
| 9 | 曹弋, 杨忠振, 左忠义, 等. 绿灯倒计时信号对驾驶行为的影响[J]. 中国安全科学学报, 2015, 25(2): 77-82. |
| Cao Yi, Yang Zhong-zhen, Zuo Zhong-yi, et al. Influence of countdown signal of green light on driving behavior[J]. China Safety Science Journal, 2015, 25(2): 77-82. | |
| 10 | Choudhury C F, Ben-Akiva M E. A lane selection model for urban intersections[J]. Transportation Research Record: Journal of the Transportation Research Board, 2008, 2088: 167-176. |
| 11 | Peng J, Guo Y, Fu R, et al. Multi-parameter prediction of drivers' lane-changing behaviour with neural network model[J]. Applied Ergonomics, 2015, 50: 207-217. |
| 12 | 杨龙海, 罗沂, 徐洪. 基于GPS定位数据的高速公路换道特征分析与行为识别[J]. 北京交通大学学报, 2017, 41(3): 39-46. |
| Yang Long-hai, Luo Yi, Xu Hong. Analysis and recognition of highway lane-changing behavior characteristics based on GPS location data[J]. Journal of Beijing Jiaotong University, 2017, 41(3): 39-46. | |
| 13 | 裴玉龙, 张银. 车道变换期望运行轨迹仿真[J]. 交通信息与安全, 2008, 26(4): 68-71. |
| Pei Yu-long, Zhang Yin. Lane-changing virtual desire trajectory simulation[J]. Journal of Transport Information and Safety, 2008, 26(4): 68-71. | |
| 14 | 曲昭伟, 白乔文, 陈永恒, 等. 无专用左转相位十字形交叉口左转导向线计算模型[J]. 吉林大学学报: 工学版, 2017, 47(2): 414-419. |
| Qu Zhao-wei, Bai Qiao-wen, Chen Yong-heng, et al. Model of left-turn guide line at right-angled intersection with permitted left-turning phase[J]. Journal of Jilin University(Engineering and Technology Edition), 2017, 47(2): 414-419. | |
| 15 | 南春丽, 张生瑞, 严宝杰. 基于停车线位置的左转车辆行驶轨迹仿真模型[J]. 计算机工程与应用, 2009, 45(9): 24-27. |
| Chun-li Nan, Zhang Sheng-rui, Yan Bao-jie. Traveling trace simulation model for left turn vehicles based on stop line[J]. Computer Engineering and Applications, 2009, 45(9): 24-27. | |
| 16 | 徐慧智, 裴玉龙, 程国柱. 基于期望运行轨迹的车道变换行为安全性分析[J]. 中国安全科学学报, 2010, 20(1): 90-95, 180. |
| Xu Hui-zhi, Pei Yu-long, Cheng Guo-zhu. Study on the safety of lane changing based on virtual desire trajectory[J]. China Safety Science Journal, 2010, 20(1): 90-95, 180. | |
| 17 | Alhajyaseen W K M, Asano M, Nakamura H, et al. Stochastic approach for modeling the effects of intersection geometry on turning vehicle paths[J]. Transportation Research Part C: Emerging Technologies, 2013, 32: 179-192. |
| 18 | . 城市道路交通标志和标线设置规范[S]. |
| 19 | Wei F, Guo W, Liu X, et al. Left-turning vehicle trajectory modeling and guide line setting at the intersection[J]. Discrete Dynamics in Nature and Society, 2014(11): 1-7. |
| 20 | Qu Z W, Bai Q W, Chen Y H, et al. Optimal design of left-lane line extensions considering non-yielding maneuvers at the beginning of the permitted phase[J]. Journal of Southeast University(English Edition), 2018, 34(1): 120-126. |
| 21 | 关宏志. 非集计模型—交通行为分析的工具[M]. 北京: 人民交通出版社, 2004. |
| 22 | . 道路交通标志和标线 第3部分:道路交通标线[S]. |
| 23 | 杨少伟. 道路勘测设计[M]. 2版. 北京: 人民交通出版社, 2009. |
| [1] | Zhi-jun TENG,Yu ZHANG,Hao-tian LI,Ming-yang SUN. Adaptive D⁃S evidence theory map matching algorithm of complex road network [J]. Journal of Jilin University(Engineering and Technology Edition), 2021, 51(2): 524-530. |
| [2] | Qiao⁃wen BAI,Zhao⁃wei QU,Yong⁃heng CHEN,Shuai XIONG,Chu⁃qing TAO. Modeling on trajectories of through vehicles with an unprotected left⁃turn phase under non⁃strict priority [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(3): 673-679. |
| [3] | XU Hong-feng, GAO Shuang-shuang, ZHENG Qi-ming, ZHANG Kun. Hybrid dynamic lane operation at signalized intersection [J]. 吉林大学学报(工学版), 2018, 48(2): 430-439. |
| [4] | SONG Xian-min, DENG Xiao-lei, GAO Ming, QU Zhao-wei. Full velocity difference model based on dynamic reaction time [J]. 吉林大学学报(工学版), 2017, 47(6): 1703-1709. |
| [5] | LI Xian-sheng, LI Ming-ming, REN You, YAN Jia-hui, CHEN Xiao-xia. Driver's fixation characteristics in different urban road alignments [J]. 吉林大学学报(工学版), 2016, 46(5): 1447-1452. |
| [6] | XU Hong-feng, ZHANG Kun, YAO Rong-han. Control strategy of full metering signalization at roundabout [J]. 吉林大学学报(工学版), 2016, 46(1): 76-84. |
| [7] | XU Hong-feng, GENG Xian-cai, HE Long. Signal timing plan for fully signalized four-leg roundabouts with single-approach-entering operation [J]. 吉林大学学报(工学版), 2014, 44(4): 953-962. |
| [8] | YANG Qing-fang, MEI Duo, HAN Zhen-bo, ZHANG Biao. Ant colony optimization for the shortest path of urban road network based on cloud computing [J]. 吉林大学学报(工学版), 2013, 43(05): 1210-1214. |
| [9] | WANG Xiao-wei, WANG Dian-hai, JIANG Sheng, JIN Sheng. Isolated intersection control based on hybrid optimization model [J]. 吉林大学学报(工学版), 2012, 42(增刊1): 170-174. |
| [10] | WEI Li-ying;YING Li-tian. Modeling and simulation on bicycle traffic flow based on cellular automaton [J]. 吉林大学学报(工学版), 2011, 41(01): 51-0055. |
| [11] | LIU Xin, WANG Dian-Hai, WANG Xin-Ying, SONG Xian-Min, WANG De-Min. Information collection and processing method for intelligent traffic system based on IPv6 [J]. 吉林大学学报(工学版), 2010, 40(05): 1225-1229. |
| [12] | DUAN Hou-li, LI Zhi-heng, ZHANG Yi,HU Jian-ming. Dynamic subdivision of road network into coordinated control regions [J]. 吉林大学学报(工学版), 2009, 39(增刊2): 13-0018. |
| [13] | GUI Hai-Lin, WANG Jin-Song, WANG Yun-Peng, E Wen-Juan, GAO Lei. Vehicle fuel consumption model based on urban road operations [J]. 吉林大学学报(工学版), 2009, 39(05): 1146-1150. |
| [14] |
WANG Yun-peng,SUN Wen-cai,LI Shi-wu,ZHOU Ru-bo,ZHANG Jing-hai,LIU Yu .
Route optimization model for urban hazardous material transportation based on Arc GIS [J]. 吉林大学学报(工学版), 2009, 39(01): 45-49. |
| [15] |
Jiang Gui-yan,Guo Hai-feng,Wu Chao-teng .
Identification method of urban road traffic conditions based on inductive coil data [J]. 吉林大学学报(工学版), 2008, 38(增刊): 37-0042. |
|
||