Journal of Jilin University(Engineering and Technology Edition) ›› 2021, Vol. 51 ›› Issue (4): 1528-1539.doi: 10.13229/j.cnki.jdxbgxb20200500
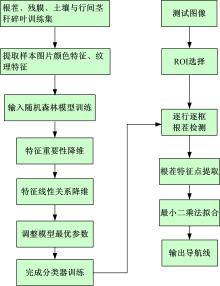
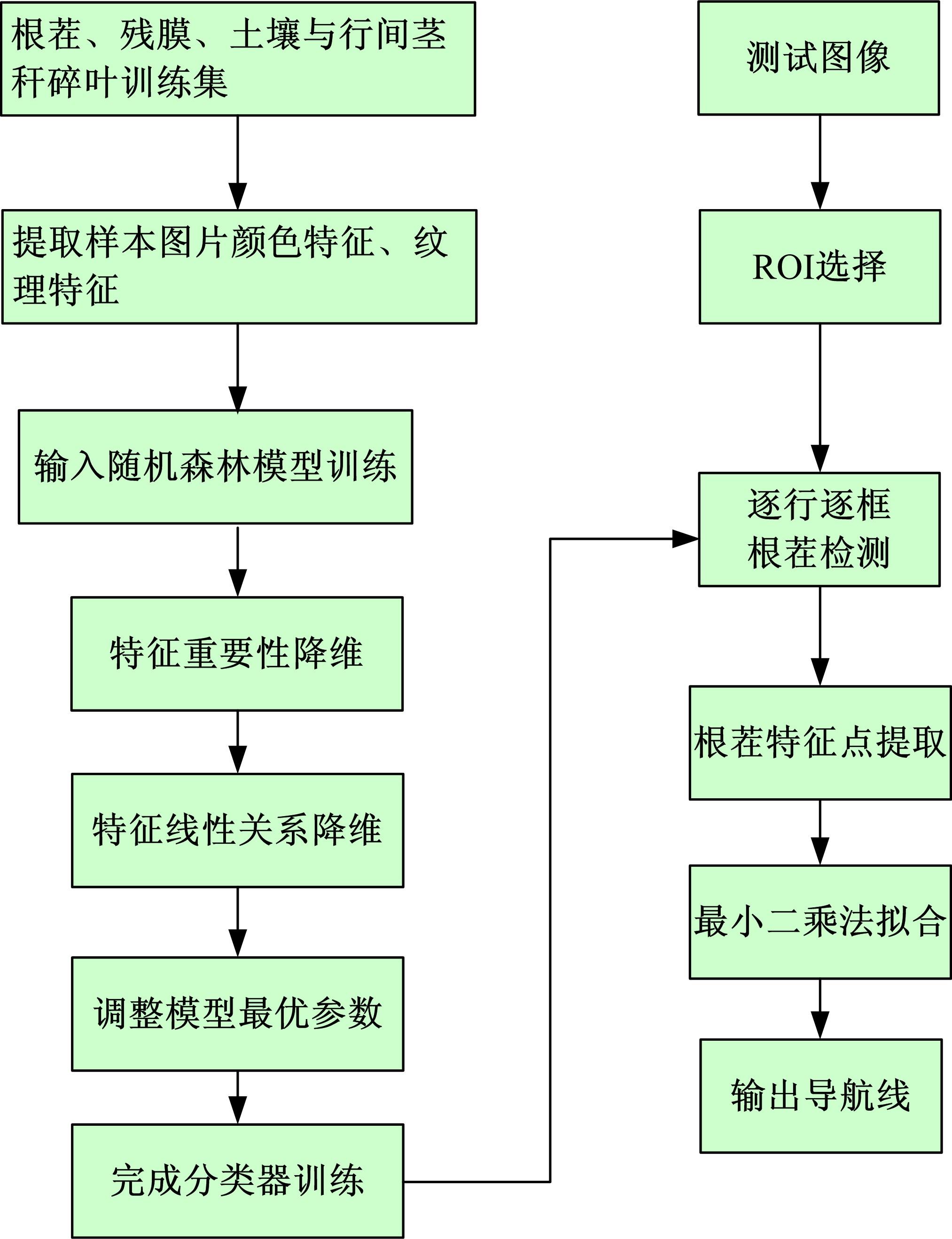
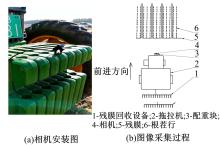
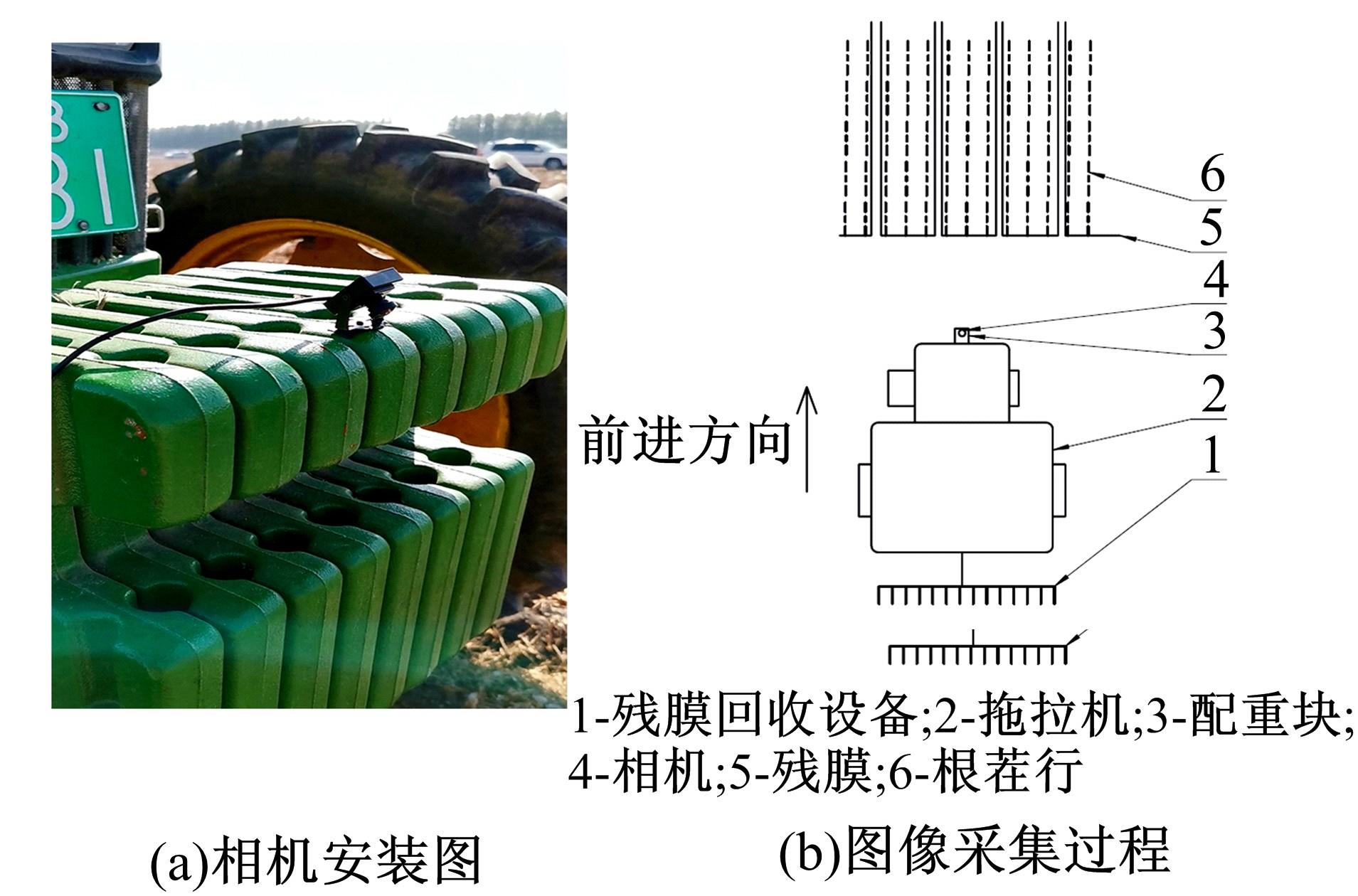
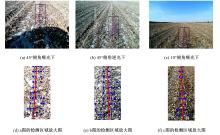
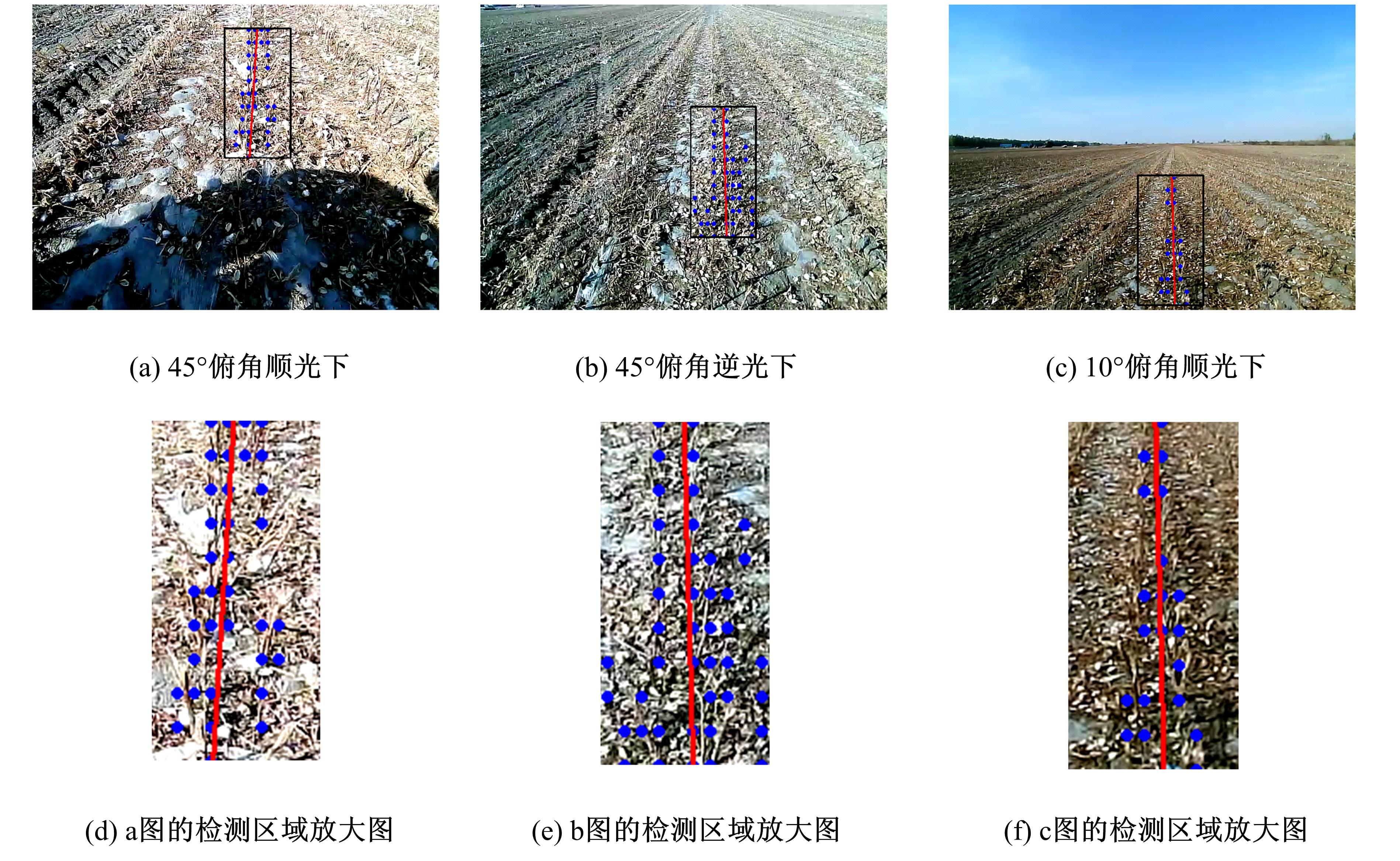
Method of extraction of navigation path of post-autumn residual film recovery based on stubble detection
Jing-bin LI1( ),Yu-kun YANG1,Bao-qin WEN1,Za KAN1,Wen SUN2,Shuo YANG1
),Yu-kun YANG1,Bao-qin WEN1,Za KAN1,Wen SUN2,Shuo YANG1
- 1.College of Mechanical and Electrical Engineering,Shihezi University,Shihezi 832003,China
2.College of Water Conservancy and Architecture,Shihezi University,Shihezi 832003,China
CLC Number:
- S24


| 1 | 汤一平,王伟羊,朱威,等. 基于机器视觉的茶陇识别与采茶机导航方法[J]. 农业机械学报, 2016, 47(1): 45-50. |
| Tang Yi-ping, Wang Wei-yang, Zhu Wei, et al. Tea ridge identification and navigation method for tea-plucking machine based on machine vision[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(1): 45-50. | |
| 2 | 关卓怀,陈科尹,丁幼春,等.水稻收获作业视觉导航路径提取方法[J].农业机械学报,2020, 51(1):19-28. |
| Guan Zhuo-huai, Chen Ke-yin, Ding You-chun,et al. Visual navigation path extraction method in rice harvesting[J]. Transactions of the Chinese Society for Agricultural Machinery, 2020, 51(1):19-28. | |
| 3 | 李云伍,徐俊杰,王铭枫,等. 丘陵山区田间道路自主行驶转运车及其视觉导航系统研制[J]. 农业工程学报, 2019, 35(1): 52-61. |
| Li Yun-wu, Xu Jun-jie,Wang Ming-feng,et al. Development of autonomous driving transfer trolley on field roads and its visual navigation system for hilly areas[J]. Transactions of the Chinese Society of Agricultural Engineering,2019, 35(1): 52-61. | |
| 4 | 廖娟,汪鹞,尹俊楠,等. 基于分区域特征点聚类的秧苗行中心线提取[J]. 农业机械学报, 2019, 50(11): 34-41. |
| Liao Juan, Wang Yao, Yin Jun-nan, et al. Detection of seedling row centerlines based on sub-regional feature points clustering[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(11): 34-41. | |
| 5 | 赵岩,陈学庚,温浩军,等. 农田残膜污染治理技术研究现状与展望[J]. 农业机械学报, 2017, 48(6):1-14. |
| Zhao Yan,Chen Xue-geng,Wen Hao-jun,et al. Research status and prospect of control technology for residual plastic film pollution in farmland[J]. Transactions of the Chinese society for Agricultural Machinery, 2017, 48(6):1-14. | |
| 6 | 姬长英,周俊. 农业机械导航技术发展分析[J]. 农业机械学报, 2014, 45(9): 44-54. |
| Ji Chang-ying, Zhou Jun. Current situation of navigation technologies for agricultural machinery[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(9):44-54. | |
| 7 | 胡静涛,高雷,白晓平,等. 农业机械自动导航技术研究进展[J]. 农业工程学报, 2015, 31(10): 1-10. |
| Hu Jing-tao, Gao Lei, Bai Xiao-ping, et al. Review of research on automatic guidance of agricultural vehicles[J]. Transactions of the Chinese Society of Agricultural Engineering, 2015, 31(10): 1-10. | |
| 8 | 李景彬,陈兵旗,刘阳. 棉花铺膜播种机导航路线图像检测方法[J]. 农业机械学报, 2014, 45(1): 40-45. |
| Li Jing-bin, Chen Bing-qi, Liu Yang. Image detection method of navigation route of cotton plastic film mulch planter[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(1): 40-45. | |
| 9 | 彭顺正,坎杂,李景彬. 矮化密植枣园收获作业视觉导航路径提取[J]. 农业工程学报, 2017, 33(9): 45-52. |
| Peng Shun-zheng, Kan Za, Li Jing-bin. Extraction of visual navigation directrix for harvesting operation in short-stalked and close-planting jujube orchard[J]. Transactions of the Chinese Society of Agricultural Engineering, 2017, 33(9):45-52. | |
| 10 | 刁智华,赵明珍,宋寅卯,等.基于机器视觉的玉米精准施药系统作物行识别算法及系统实现[J]. 农业工程学报,2015,31(7):47-52. |
| Diao Zhi-hua, Zhao Ming-zhen, Song Yin-mao, et al. Crop line recognition algorithm and realization in precision pesticide system based on machine vision[J]. Transactions of the Chinese Society of Agricultural Engineering, 2015, 31(7):47-52. | |
| 11 | 宋宇,刘永博,刘路,等. 基于机器视觉的玉米根茎导航基准线提取方法[J]. 农业机械学报, 2017, 48(2): 38-44. |
| Song Yu, Liu Yong-bo, Liu Lu, et al. Extraction method of navigation baseline of corn roots based on machine vision[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017, 48(2):38-44. | |
| 12 | 孟庆宽,张漫,仇瑞承,等. 基于改进遗传算法的农机具视觉导航线检测[J]. 农业机械学报, 2014, 45(10): 39-46. |
| Meng Qing-kuan, Zhang Man, Qiu Rui-cheng, et al. Navigation line detection for farm machinery based on improved genetic algorithm[J]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(10): 39-46. | |
| 13 | 王春雷,卢彩云,陈婉芝,等. 基于遗传算法和阈值滤噪的玉米根茬行图像分割[J]. 农业工程学报, 2019, 35(16): 198-205. |
| Wang Chun-lei, Lu Cai-yun, Chen Wan-zhi, et al.Image segmentation of maize stubble row based on genetic algorithm and threshold filtering noise[J]. Transactions of the Chinese Society of Agricultural Engineering,2019, 35(16): 198-205. | |
| 14 | 杨洋,张亚兰,苗伟,等. 基于卷积神经网络的玉米根茎精确识别与定位研究[J]. 农业机械学报, 2018, 49(10): 46-53. |
| Yang Yang, Zhang Ya-lan, Miao Wei, et al. Accurate identification and location of corn rhizome based on faster R-CNN[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(10): 46-53. | |
| 15 | Fu F, Duan J, Zou X, et al. Banana detection based on color and texture features in the natural environment[J]. Computers and Electronics in Agriculture, 2019,167:105057. |
| 16 | Abdalla A, Cen H, Wan L,et al. Fine-tuning convolutional neural network with transfer learning for semantic segmentation of ground-level oilseed rape images in a field with high weed pressure[J]. Computers and Electronics in Agriculture,2019,167:105091. |
| 17 | Bakhshipour A, Jafari A. Evaluation of support vector machine and artificial neural networks in weed detection using shape features[J]. Computers and Electronics in Agriculture, 2018,145:153-160. |
| 18 | 蔡道清,李彦明,覃程锦,等. 水田田埂边界支持向量机检测方法[J]. 农业机械学报, 2019, 50(6): 22-27, 109. |
| Cai Dao-qing, Li Yan-ming, Qin Cheng-jin, et al. Detection method of boundary of paddy fields using support vector machine[J]. Transactions of the Chinese Society for Agricultural Machinery, 2019, 50(6): 22-27, 109. | |
| 19 | 黄小玉,李光林,马驰,等. 基于改进判别区域特征融合算法的近色背景绿色桃子识别[J].农业工程学报,2018,34(23):142-148. |
| Huang Xiao-yu, Li Guang-lin, Ma Chi, et al. Green peach recognition based on improved discriminative regional feature integration algorithm in similar background[J]. Transactions of the Chinese Society of Agricultural Engineering, 2018,34(23):142-148. | |
| 20 | 王煜,高向东,陈子琴,等. 激光-MAG复合焊接过程金属蒸气和背部熔池图像分析[J]. 机械工程学报,2019,55(19):167-173. |
| Wang Yu, Gao Xiang-dong, Chen Zi-qin, et al. Analysis of the images of metal vapor and bottom-molten pool in laser-MAG hybrid welding process[J]. Journal of Mechanical Engineering, 2019, 55(19):167-173. | |
| 21 | Haralick R M. Statistical and structural approaches to texture[J]. Proceedings of the IEEE, 1979,67(5): 786-804. |
| 22 | Breiman L, Cutler R A. Random forests machine learning[J]. Journal of Clinical Microbiology, 2001, 2:199-228. |
| 23 | Criminisi A, Shotton J, Robertson D, et al. Regression forests for efficient anatomy detection and localization in CT studies[J]. Journal of Bacteriology, 1957,74(5):559-564. |
| 24 | Stumpf André, Kerle Norman. Object-oriented mapping of landslides using random forests[J]. Remote Sensing of Environment, 2011, 115(10):2564-2577. |
| 25 | 石礼娟,卢军.基于随机森林的玉米发育程度自动测量方法[J].农业机械学报,2017,48(1):169-174. |
| Shi Li-juan, Lu Jun. Automatic measurement method for maize ear development degree based on random forest[J]. Transactions of the Chinese Society for Agricultural Machinery, 2017,48(1):169-174. | |
| 26 | Verikas A, Gelzinis A, Bacauskiene M. Mining data with random forests: a survey and results of new tests[J]. Pattern Recognition, 2011, 44(2):330-349. |
| 27 | Raschka S. Python Machine Learning[M]. Birmingham: Packt Publishing, 2014. |
| 28 | Lin P,Li X,Li D,et al. Rapidly and exactly determining postharvest dry soybean seed quality based on machine vision technology[J]. Scientific Reports,2019,9(1):17143. |
| 29 | 刘一鸣,侯智超,李晓琴,等.基于卷积神经网络的肺结节检测方法[J].生物医学工程学杂志,2019,36(6):969-977, 985. |
| Liu Yi-ming, Hou Zhi-chao, Li Xiao-qin, et al. Pulmonary nodule detection method based on convolutional neural network[J]. Journal of Biomedical Engineering,2019, 36(6):969-977, 985. |
| [1] | Wan-fu GAO,Ping ZHANG,Liang HU. Nonlinear feature selection method based on dynamic change of selected features [J]. Journal of Jilin University(Engineering and Technology Edition), 2019, 49(4): 1293-1300. |
| [2] | LIU En-ze,WU Wen-fu. Agricultural surface multiple feature decision fusion disease judgment algorithm based on machine vision [J]. Journal of Jilin University(Engineering and Technology Edition), 2018, 48(6): 1873-1878. |
| [3] | LIN Jin-hua, WANG Yan-jie, WANG Lu, YAO Yu. Real-time surface reconstruction based global camera pose optimization [J]. 吉林大学学报(工学版), 2018, 48(3): 909-918. |
| [4] | TIAN Yan-tao, ZHANG Yu, WANG Xiao-yu, CHEN Hua. Estimation of side-slip angle of electric vehicle based on square-root unscented Kalman filter algorithm [J]. 吉林大学学报(工学版), 2018, 48(3): 845-852. |
| [5] | LIU Jie, ZHANG Ping, GAO Wan-fu. Feature selection method based on conditional relevance [J]. 吉林大学学报(工学版), 2018, 48(3): 874-881. |
| [6] | YUAN Zhe-ming, ZHANG Hong-yang, CHEN Yuan. HIV-1 protease cleavage site prediction based on feature selection and support vector machine [J]. 吉林大学学报(工学版), 2017, 47(2): 639-646. |
| [7] | ZHANG Fei, SHAN Zhong-de, REN Yong-xin, NIE Jun-gang, LIU Feng. Calibration of line array camera for head defect detection system on cylinder cover [J]. 吉林大学学报(工学版), 2017, 47(2): 540-545. |
| [8] | ZHOU Xiao-dong, ZHANG Ya-chao, TAN Qing-chang, ZHANG Wei-jun. New method of cylindricity measurement based on structured light vision technology [J]. 吉林大学学报(工学版), 2017, 47(2): 524-529. |
| [9] | ZHAO Dong, ZANG Xue-bai, ZHAO Hong-wei. Random forest prediction method based on optimization of fruit fly [J]. 吉林大学学报(工学版), 2017, 47(2): 609-614. |
| [10] | QIN Yu-gang, MA Yong, ZHANG Liang, LI Teng-fei. Parameter identification of ship's maneuvering motion based on improved least square method [J]. 吉林大学学报(工学版), 2016, 46(3): 897-903. |
| [11] | ZHANG Bo, WANG Wen-jun, WEE Minkooc, CHENG Bo. Detection handheld phone use by driver based on machine vision [J]. 吉林大学学报(工学版), 2015, 45(5): 1688-1695. |
| [12] | ZHAO Jian, ZHANG Jin, ZHU Bing. Fuzzy sliding mode traction control based on road friction coefficient estimation [J]. 吉林大学学报(工学版), 2015, 45(4): 1036-1042. |
| [13] | DAI Kun, YU Hong-yi, QIU Wen-bo,LI Qing. Unsupervised feature selection algorithm based on support vector machine for network data [J]. 吉林大学学报(工学版), 2015, 45(2): 576-582. |
| [14] | WANG Gang, ZHANG Yu-xuan, LI Ying, CHEN Hui-ling, HU Wei-tong, QIN Lei. Novel method for microarray data dimension reduction [J]. 吉林大学学报(工学版), 2014, 44(5): 1429-1434. |
| [15] | LIU Chang-ying, CAI Wen-jing, WANG Tian-hao, LI Ji-zhi, JIA Yan-mei, SONG Yu-he. Vision inspection technology of fracture splitting notch of auto connecting rod [J]. 吉林大学学报(工学版), 2014, 44(4): 1076-1080. |
|
||